电子锁
1.相关申请的交叉引用
2.本技术要求于2019年7月9日提交的备案号为bas
‑
2019502
‑
02
‑
us的名称为“电子锁”的第62/872,121号美国临时申请的优先权,其全部公开内容,包括其附录,通过引用明确并入本文。本技术还要求于2019年4月5日提交的备案号为bas
‑
2019502
‑
01
‑
us的名称为“机电存储门锁”的第62/829,778号美国临时申请的优先权,其全部公开内容通过引用明确并入本文。
技术领域
3.本公开涉及门锁,并且特别地涉及具有机电锁定系统的门锁。
背景技术:
4.已知存储区域(诸如锁柜、保险箱、房间和其它存储区域)具有控制通过门进入存储容器或房间的内部的机械或机电锁定系统。在某些情况下,向上抬起门,以露出通往存储区域的入口。在这些情况下,门可以像典型的“车库门”一样被沿着轨道向上抬起,或者门可以被实现为卷升门。
技术实现要素:
5.本公开总体上涉及一种包括阻挡件(例如,螺栓)的锁,该阻挡件可用于选择性地防止通过诸如门的入口进入。阻挡件可以保持在阻挡位置,以通过保持器防止通过入口进入。在可替换实施例中,阻挡件也可以保持在打开位置,以允许通过入口进入。保持器可以用于将阻挡件保持在阻挡位置,以防止通过入口进入,并且在某些实施例中,保持器还可用于将阻挡件保持在打开位置,以允许通过入口进入。保持器阻挡件可用于将保持器保持在适当位置,以将阻挡件(例如,螺栓)保持在固定位置。在某些可替换实施例中,可以采用致动器来定位保持器阻挡件。在某些实施例中,致动器由电子控制器控制。
6.在本公开的示例性实施例中,提供了一种存储区域。该存储区域包括:门和锁。该锁包括:阻挡件(例如,螺栓),其位于门的前侧的顶上,阻挡件可在锁定门的伸出位置与沿着第一方向解锁门的缩回位置之间移动;和阻挡件致动器,其可操作以接收沿着第一方向的用户输入运动,以在伸出位置与缩回位置之间致动阻挡件;电子控制器,其可操作地联接到锁并且可致动以选择性地阻挡阻挡件致动器的移动;以及输入装置,电子控制器可由输入装置致动。
7.在其示例中,该锁进一步包括:保持器,其可选择性地定位到阻挡位置以阻挡阻挡件致动器致动阻挡件,并且可选择性地定位到解锁位置以允许阻挡件致动器致动阻挡件;以及保持器阻挡件,其可操作以选择性地与保持器协作,以将保持器保持在阻挡位置,从而阻挡阻挡件致动器致动阻挡件,电子控制器可操作地联接到保持器阻挡件并且可致动以将保持器阻挡件定位成与保持器协作,从而将保持器保持在阻挡位置。
8.在其进一步的示例中,该锁包括:阻挡件;阻挡件致动器,其可操作以选择性地致
动阻挡件;保持器,其可选择性地定位到阻挡位置以阻挡阻挡件致动器致动阻挡件,并且可选择性地定位到未阻挡位置以允许阻挡件致动器致动阻挡件;以及保持器阻挡件,其可操作以选择性地与保持器协作,以将保持器保持在阻挡位置,从而阻挡阻挡件致动器致动阻挡件。在其进一步的示例中,保持器包括在保持器的阻挡位置可定位在至少一个凹部中的突起。在其进一步的示例中,该锁包括偏压构件,其将保持器的突起偏压到至少一个凹部中。在其进一步的示例中,阻挡致动器包括至少一个凹部。在其某些示例中,所述至少一个凹部包括第一凹部,所述第一凹部被定位成与所述突起协作以将所述阻挡件保持在缩回位置,并且所述至少一个凹部进一步包括第二凹部,所述第二凹部被定位成与所述突起协作以将所述阻挡件保持在伸出位置。
9.在进一步的示例中,所述保持器可沿着往复运动方向在所述阻挡位置与所述解除阻挡位置之间往复运动,所述保持器阻挡件包括止动件,所述止动件可沿着与所述往复运动方向正交的插入方向插入到止动位置,以防止保持器阻挡件沿着往复运动方向移动。在其某些示例中,止动件包括可插入保持器中的凹部中的凸片。在其某些示例中,止动件包括轴承,该轴承可沿着插入方向插入到止动位置,以对所述保持器从所述阻挡位置到所述未阻挡位置的往复运动形成物理障碍。
10.在其示例中,该锁进一步包括:马达;以及电枢连杆,其可通过所述马达的通电而移动,电枢连杆被定位成选择性地将轴承定位在止动位置以及使轴承从止动位置移出。在其某些示例中,磁体由电枢连杆机构承载,轴承与磁体之间的磁引力能够实现将轴承从止动位置移出。在其示例中,保持器、轴承、马达和电枢连杆由托架承载,托架、保持器、轴承、马达和电枢连杆包括可固定到所述阻挡件以便与其一起平移的子组件。
11.在其示例中,保持器可在阻挡位置与未阻挡位置之间旋转,保持器阻挡件包括止动件,止动件可旋转到止动位置中,以防止保持器旋转。在其进一步的示例中,该锁进一步包括:由阻挡致动器呈现的至少一个止动表面,在止动位置,保持器被截留在止动件与止动表面之间以防止旋转。在附加示例中,该锁进一步包括:承载止动件的蜗轮;马达;由马达旋转的蜗杆,蜗杆与蜗轮相互啮合,由此马达的通电致动止动件。在其示例中,该锁进一步包括偏压元件,该偏压元件可定位成将保持器偏压到阻挡位置,并且进一步可定位成将保持器偏压到未阻挡位置,止动件限定偏压元件的基准。在其示例中,偏压元件包括扭转弹簧。
12.在其示例中,该锁进一步包括:致动器,其可操作以选择性地使保持器阻挡件移动到所述阻挡位置,并选择性地使保持器阻挡件从阻挡位置移出;以及电子控制器,其可操作地联接到致动器,以选择性地使致动器移动保持器阻挡件。
13.在其示例中,保持器包括凸轮。在进一步的示例中,保持件阻挡件包括具有径向突起的蜗轮,径向突起可定位成将保持器保持在阻挡位置,以阻挡阻挡件致动器致动阻挡件。在其示例中,蜗轮包括开口中心,并且径向突起包括径向向内的突起。
14.在锁的进一步的示例中,阻挡件和阻挡件致动器各自形成整体滑动件的一部分。
15.在锁的进一步的例子中,阻挡件致动器包括子组件。
16.在其示例中,该锁进一步包括偏压元件,偏压元件选择性地偏压凸轮以在阻挡位置与未阻挡位置之间移动。在其示例中,偏压元件包括弹簧,并且该锁进一步包括可移动弹簧基准,可移动弹簧基准可在对应于中间位置的第一位置之间移动,在中间位置,弹簧与可移动弹簧基准协作以定位保持器。
17.在其示例中,输入装置包括便携式操作员装置,并且电子控制器和便携式操作员装置通过无线连接进行通信。
18.在其示例中,输入装置可操作以将凭证传送给电子控制器,并且电子控制器可操作以评估凭证,从而确定凭证是否是能够致动控制器以停止阻挡阻挡件致动器移动的有效凭证,从而允许沿着第一方向的用户输入运动在锁定门的伸出位置与解锁门的缩回位置之间致动阻挡件。
19.在本公开的示例性实施例中,提供了一种适用于门的门锁。该门锁包括:螺栓,其可沿着第一方向在伸出位置与缩回位置之间移动;保持器,其可操作地联接到螺栓,并且可定位成将螺栓保持在伸出位置或缩回位置中的一者;阻挡件,其可操作地联接到保持器,阻挡件可在阻挡位置与释放位置之间移动,其中当阻挡件处于阻挡位置时,保持器将螺栓保持在伸出位置与缩回位置中的一者,并且当阻挡件处于释放位置时,保持器可移动以允许螺栓从伸出位置和缩回位置中的一者移动到伸出位置和缩回位置中的另一者;致动器,其可操作地联接到阻挡件以将阻挡件从释放位置移动到阻挡位置;以及电子控制器,其可操作地联接到致动器,以使致动器在第二方向上将阻挡件从释放位置移动到阻挡位置。
20.在其一示例中,保持器可在相对于所述第一方向成角度的第二方向上移动。
21.在其一示例中,第二方向与第一方向正交。在其另一个示例中,阻挡件可在第三方向上移动,以在释放位置与阻挡位置之间移动,第三方向相对于第二方向成角度。在其变体中,第三方向与第一方向正交。在其另一变体中,致动器包括电动马达。在其又一变体中,电动马达旋转小齿轮,小齿轮与由阻挡件承载的齿条相互啮合。
22.在其进一步的示例中,螺栓从滑动件伸出,滑动件具有第一凹部和第二凹部,当螺栓被接收在缩回位置时,保持器的突起被接收在第一凹部中,并且当螺栓被接收在伸出位置时,保持器的突起被接收在第二凹部中。在其变体中,该门锁进一步包括多个偏压构件,第一偏压构件将保持器的突起偏压到滑动件的第一凹部或第二凹部中的一者中。在其进一步的变体中,第二偏压构件将螺栓偏压到伸出位置。在又一个示例中,该门锁进一步包括前安装支架和后安装支架,前安装支架可定位在门的前侧上,后安装支架可定位在门的后侧上。在其变体中,螺栓被捕获在门与前安装支架之间。
23.在进一步的示例中,该门锁与门结合使用,并且螺栓位于门的前侧的顶上,螺栓可沿着门的前侧在伸出位置与缩回位置之间移动。在示例中,该门锁进一步包括操作者可致动输入,该操作者可致动输入可操作以接收来自用户的沿着第一方向的输入运动,从而在伸出位置与缩回位置之间移动螺栓。
24.在本公开的可替换实施例中,提供了一种用于适用于门的门锁。该锁包括:螺栓,其可沿着第一方向在伸出位置与缩回位置之间移动;保持器,其可操作地联接到螺栓,并且可定位成将螺栓保持在伸出位置或缩回位置中的一者;阻挡件,其可操作地联接到保持器,阻挡件可在阻挡位置与释放位置之间移动,其中当阻挡件处于阻挡位置时,保持器将螺栓保持在伸出位置与缩回位置中的一者,并且当阻挡件处于释放位置时,保持器可移动以允许螺栓从伸出位置和缩回位置中的一者移动到伸出位置和缩回位置中的另一者;致动器,其可操作地联接到阻挡件以将阻挡件从释放位置移动到阻挡位置;以及电子控制器,其可操作地联接到致动器,以使致动器在第二方向上将阻挡件从释放位置移动到阻挡位置。
附图说明
25.通过结合附图参考示例性实施例的以下描述,本公开的上述和其它特征和优点以及实现它们的方式将变得更加明显,并且将被更好地理解,在附图中:
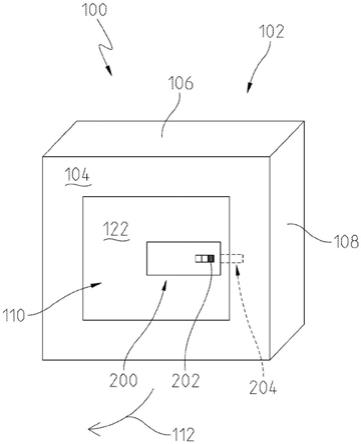
26.图1a示出了具有封闭容积的存储容器的代表性视图,封闭容积可通过门进入,门利用门锁被固定在关闭位置以拒绝进入封闭容积,门锁具有位于伸出位置的螺栓;
27.图1b示出了具有门的图1a的存储容器的代表性视图,门可从关闭位置移动到打开位置,以由于门锁的螺栓位于缩回位置而允许进入封闭容积;
28.图2a示出了用于图1a和图1b的存储容器的示例性门锁和存储容器的门的后立体图;
29.图2b示出了图2a的门锁的前立体图;
30.图3a示出了图2a的门锁的后分解图;
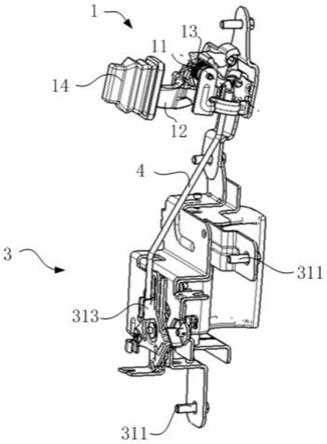
31.图3b示出了图2a的门锁的局部后分解图;
32.图4示出了图2a的门锁的局部截面图,其中门锁的阻挡件和保持器协作以为门锁提供锁定配置,其中门锁的螺栓在伸出位置与缩回位置之间的移动被阻挡;
33.图5示出了图2a的门锁的局部截面图,其中门锁的阻挡件和保持器协作以为门锁提供解锁配置,其中允许门锁的螺栓在伸出位置与缩回位置之间移动;
34.图6示出了沿着图2a中的线6
‑
6截取的图2a的门锁和门的截面图,其中门锁的螺栓处于伸出位置;
35.图7示出了图6的截面图,其中门锁的螺栓从伸出位置转变到缩回位置;
36.图8示出了图6的截面图,其中门锁的螺栓处于缩回位置;
37.图9示出了沿着图2a中的线9
‑
9截取的图2a的门锁和门的截面图,其中门锁的阻挡件和保持器处于图4的锁定配置,并且螺栓处于图6的伸出位置;
38.图10示出了图9的截面图,其中门锁的阻挡件和保持器处于图5的解锁配置,并且螺栓处于图6的伸出位置;
39.图11示出了图9的截面图,其中门锁的阻挡件和保持器处于图5的解锁配置,并且螺栓从图6的伸出位置转变到图8的缩回位置;
40.图12示出了图9的截面图,其中门锁的阻挡件和保持器处于图4的锁定配置,并且螺栓处于图8的缩回位置;
41.图13示出了图2a的门锁的局部截面图,其中螺栓处于图6的伸出位置;
42.图14示出了图13的局部截面图,其中螺栓处于图8的缩回位置;
43.图15是根据本公开的可替换实施例锁的立体图,其示出处于缩回位置的螺栓;
44.图16是图15的锁的立体图,其示出处于伸出位置的螺栓;
45.图17是示出图15和图16的实施例的后安装支架和承载螺栓的滑动件的透视分解图;
46.图18是图15
‑
图17的实施例的后安装支架、承载螺栓的滑动件和致动子组件的分解立体图;
47.图19是图15
‑
图18的实施例的后安装支架、承载螺栓的滑动件和致动子组件的另一透视分解图,其中致动子组件的前检修面板被移除,以露出致动子组件的内部部件;
48.图20是在图15和图16中组装/所示的锁的分解立体图;
49.图21是示出了图15
‑
图20所示的实施例的承载螺栓的滑动件、后安装支架和致动子组件的立体图;
50.图22是图15
‑
图21所示锁的组装的立体图;
51.图23是后安装支架的局部立体图;
52.图23a是图15
‑
图22中所示的锁的局部立体图,其中承载螺栓的滑动件组装到后安装支架上,并且其中螺栓被示出处于伸出位置;
53.图24是图15
‑
图23的锁的立体图,其示出了致动子组件到滑动件的组装,其中移除了致动子组件的前入口面板以露出致动子组件的内部部件,并且示出了被定位成将螺栓保持在缩回位置的保持器,也如图15所示;
54.图25是类似于图24,除了保持器已经从图24的位置经历了初始致动以允许螺栓缩回的立体图;
55.图26是类似于图24和图25,但是示出了处于伸出位置的螺栓和(从图25所示的位置)返回到其正常偏压位置的保持器的立体图;
56.图27是图15
‑
图26所示锁的分解图,其示出了致动子组件与滑动件脱离,并示出了处于伸出位置的螺栓;
57.图28是穿过与凸片和狭槽相交的截面平面截取的图15
‑
图27的锁的截面图,凸片和狭槽用于将致动子组件固定到滑动件以便与其一起平移;
58.图29是图15
‑
图28所示锁的分解图,其示出致动子组件与滑动件脱离,并示出了处于缩回位置的螺栓;
59.图30是图15
‑
图29的锁的滑动件和后安装支架的后立体图,其示出了处于伸出位置的滑动件;
60.图31是图15
‑
图29的锁的滑动件和后安装支架的后立体图,其示出了处于缩回位置的滑动件;
61.图32是后立体图,其示出了将滑动件偏压到伸出位置的滑动件偏压元件;
62.图33是后立体图,其示出了被压缩以允许滑动件保持缩回位置的滑动件偏压元件;
63.图34和图35是通过本公开的实施例的致动子组件的截面图;
64.图36和图37分别是本公开的可替换实施例锁的前立体图和后立体图;
65.图38是图36和图37所示门锁以及相关门的后分解图;
66.图39是图37
‑
图38所示门锁的前视分解立体图;
67.图40是图36
‑
图39所示门锁的前视分解立体图;
68.图41是图36
‑
图40所示门锁的截面图;
69.图42是示出与图36
‑
图41所示门锁结合使用的锁定组件的局部分解图;
70.图43是图36
‑
图42所示锁定组件的后立体图,其中中间安装支架被移除,以露出下面的部件,并示出了处于伸出位置的锁定螺栓;
71.图44是与图43相似,但示出了处于缩回位置的螺栓的后视立体图;以及
72.图45
‑
图53是图42所示锁定机构的局部正视图,其中图45
‑
图53中的每一个附图都示出了图36
‑
图44所示锁的渐进致动。
73.相应的附图标记贯穿几个视图表示相应的零件。本文阐述的范例说明了本发明的
示例性实施例,并且这样的范例不应被解释为以任何方式限制本发明的范围。
具体实施方式
74.为了促进对本公开原理的理解,现在参考附图中示出的实施例,这些实施例将在下面描述。本文公开的实施例并不旨在穷举或将本公开限制为以下具体实施方式中公开的精确形式。相反,选择并且描述实施例是为了使本领域的其他技术人员可以利用它们的教导。因此,并不旨在由此限制本公开的范围。相应的附图标记贯穿几个视图表示相应的零件。
75.术语“联接”、“联接的”、“联接器”及其变体用于同时包括其中两个或多个部件直接物理接触的布置和其中两个或多个部件彼此不直接接触(例如,部件经由至少第三部件“联接”)但是仍然彼此协作或相互作用的布置。
76.在贯穿本公开以及权利要求书中的一些实例中,数字术语,诸如第一、第二、第三和第四,用于指代各种部件或特征。这样的使用并不旨在表示部件或特征的排序。相反,数字术语用于帮助读者识别被提及的部件或特征,并且不应被狭义地解释为提供部件或特征的特定顺序。
77.参考图1a和图1b,示出了示例性存储容器100。存储容器100包括外壳102,外壳102具有前壁104、顶部106、右侧壁108、地板(未示出)、后壁(未示出)和左侧壁(未示出)。门110设置在存储容器100的前壁104中。门110通常沿着门110的左侧被铰接到前壁104,使得门110可以通常沿着方向112摆动打开。当门110处于打开位置时,可以进入存储容器100的内部114(见图6),而当门110处于关闭位置时,不可以进入存储容器100的内部114。
78.示例性存储容器包括便携式或固定式的锁柜、保险箱和其它类型的容器。其它存储容器包括建筑物中的房间和其它可通过门或大门进入的有界区域。在实施例中,存储容器可以具有一个或多个实心壁。在实施例中,存储容器可以具有一个或多个可渗透壁,诸如线材网或线材棒。在实施例中,存储容器可以具有可枢转移动的门、可竖直移动的门(例如悬吊式车库门或卷升门)和/或可折叠的门(例如折叠门)。
79.将门110从关闭位置移动到打开位置的能力由门锁200控制。门锁200包括可从存储容器100的外部116(见图6)接近的操作者可致动输入202。通过致动操作者可致动输入202,门锁200的螺栓204从伸出位置(见图1a和图6)移动到缩回位置(见图1b和图8)。如图6所示,当螺栓204处于伸出位置时,螺栓204的第一端208被接收在存储容器100的凹部120中,并阻挡门110沿着方向112旋转或阻挡该门110竖直移动。如图8所示,当螺栓204处于缩回位置时,螺栓204的第一端208位于存储容器100的凹部120的外部,并且不会阻挡门110沿着方向112的旋转。基于该功能,螺栓204的第一端208可以被称为“阻挡件”。如图6所示,螺栓204位于门110的前侧122附近并沿着该前侧122被致动,从而位于凹部120内和凹部120外。这与标准的锁定螺栓锁不同,例如,在标准的锁定螺栓锁中,螺栓从沿着门的厚度(即,在门的正面与背面之间)形成的孔口中伸出,并缩回到该孔口中。为了沿着方向250、252(图4和图5)在门110的第一侧的顶上致动螺栓204,操作者可致动输入202接收来自用户的输入运动,以沿着方向250、252铰接操作者可致动输入202。
80.参考图2a和图2b,门锁200包括前安装支架220和后安装支架222,前安装支架220放置在门110的前侧122(见图6)上,后安装支架222放置在门110的后侧124(见图3a和6)上。
前安装支架220和后安装支架222固定到门110。在图3a所示的实施例中,门110包括多个孔口130,前安装支架220包括与门110的多个孔口130对齐的多个孔口226,并且后安装支架222包括也与门110的多个孔口130对齐的多个孔口228。紧固件(未示出)穿过相应对齐的多套孔口130、226和228,以将前安装支架220和后安装支架222固定到门110。
81.示例性紧固件包括螺栓,螺栓具有位于前安装支架220顶部的头部和延伸超过后安装支架222的螺纹轴。螺栓用螺母固定。螺栓头部的形状防止工具被应用到存储容器100的外部以从螺栓上松开螺母。其它示例性紧固件包括焊件、前安装支架220的凸片以及其它合适的结构,前安装支架220的凸片穿过门110并固定到后安装支架222,其它合适的结构用于将前安装支架220和后安装支架222中的一者或两者固定到门110。
82.参考图2b,前安装支架220包括细长孔口240,细长孔口240接收门锁200的操作者可致动输入202。参考图3a,操作者可致动输入202和螺栓204是整体滑动件232的一部分,整体滑动件被捕获在门110的前侧122(见图1a和图9)与前安装支架220之间。在其它实施例中,操作者可致动输入202和螺栓204是独立部件,它们联接到滑动件232或以其它方式可操作地联接在一起,使得当门锁200处于解锁配置时,操作者可致动输入202的致动导致螺栓204移动。对于本文件而言,“整体”表示元件由一种连续材料制成,而不是由以某种方式彼此固定的分立部件形成。
83.参考图3b,滑动件232进一步包括位于引导件242上方的接收器240。示意性地,接收器240是销,但是也可以考虑其它合适的接收器,诸如凹部。偏压构件246(图3a)的第一端244放置在接收器240上,并且偏压构件246沿着引导件242延伸。偏压构件246被进一步接收在前安装支架220的引导件236(见图3a)中,并且偏压构件246的第二端248接触前安装支架220的止动件238(见图3a)。
84.操作者将接触操作者可致动输入202,并在方向250上推动操作者可致动输入202,从而也在方向250上朝着螺栓204的缩回位置移动螺栓204(见图1b和图8)。类似地,操作者将接触操作者可致动输入202,并在方向252上推动操作者可致动输入202,从而也在方向252上朝着螺栓204的伸出位置移动螺栓204(见图1a和图6)。参考图13和图14,当螺栓204处于伸出位置(见图13)时,偏压构件246比螺栓204处于缩回位置(见图14)时受到的压缩小。因此,在缩回位置没有附加保持力的情况下,当操作者释放操作者可致动输入202时,螺栓204将被偏压构件246偏压至图13的伸出位置。
85.参考图3b,门锁200包括锁定组件300,除非向门锁200呈现有效凭证,否则锁定组件300将螺栓204保持在伸出位置。锁定组件300包括控制器302、致动器304、阻挡件306和保持器308,致动器304由控制器302控制,阻挡件306可操作地联接到致动器304,并且保持器308选择性地联接到阻挡件306。
86.参考图2a,控制器302是包括处理电路310和存储器312的电子控制器。在实施例中,控制器302是基于微处理器的,并且存储器312是非暂时性计算机可读介质,非暂时性计算机可读介质包括存储在其中的处理指令,这些处理指令可由控制器302的微处理器执行,以控制致动器304的操作,从而将阻挡件306定位在阻挡或锁定位置(见图9)和释放位置(见图10)中的一个位置。示例性非暂时性计算机可读介质包括随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(例如,eprom(可编程只读存储器)、eeprom(电可擦可编程只读存储器)或闪存)、或者能够存储信息的任何其它有形介质。
87.在实施例中,控制器302通过有线或无线之一的方式联接到输入装置320,输入装置320被安装到存储容器100或被接收在安装到存储容器100的接口中。示例性输入装置320包括小键盘、生物识别读取器、触摸屏、可移除电子按键和其它合适的输入装置。输入装置320和控制器302中的至少一者与输入装置320和控制器302中的另一者交换信息,以确定操作者是否具有进入存储容器100的内部114的有效凭证。在实施例中,控制器302从输入装置320接收信息,并确定该信息是指示有效凭证(授权进入)还是无效凭证(拒绝进入)。在实施例中,输入装置320从控制器302接收信息,并确定该信息是指示有效凭证(授权进入)还是无效凭证(拒绝进入)。在实施例中,输入装置320和控制器302中的一者可操作地联接到远程计算装置,并且来自输入装置320和控制器302中的一者或两者的信息被提供给远程计算装置,该远程计算装置确定该信息指示有效凭证(准许进入)还是无效凭证(拒绝进入)。在门锁200的图示实施例中,需要有效凭证来将门锁200从锁定状态(拒绝进入)转变到解锁状态(允许进入)以及从解锁状态(允许进入)转变到锁定状态(拒绝进入)。
88.在实施例中,控制器302无线联接到便携式操作员装置330。示例性便携式操作员装置330包括智能电话、异形卡、便携式计算装置、徽章以及操作员可以从一个位置运送到另一个位置的其它合适装置。便携式操作员装置330包括至少一个输入装置332、至少一个输出装置334和控制器336。示例性输入装置包括按钮、拨号盘、开关、触摸屏、麦克风、扫描仪、照相机、以及从操作者接收输入的其它合适的装置。示例性输出装置包括显示器、触摸屏、扬声器、振动装置、以及向操作者提供可感知输出的其它合适的装置。
89.参考图2a,控制器336是包括处理电路338和存储器340的电子控制器。在实施例中,控制器336是基于微处理器的,并且存储器340是非暂时性计算机可读介质,非暂时性计算机可读介质包括存储在其中的处理指令,这些处理指令可由控制器336的微处理器执行,以控制致动器304的操作,从而将阻挡件306定位在阻挡位置(见图9)和释放位置(见图10)中的一个位置。示例性非暂时性计算机可读介质包括随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(例如,eprom(可编程只读存储器)、eeprom(电可擦可编程只读存储器)或闪存)、或者能够存储信息的任何其它有形介质。
90.控制器302和便携式操作员装置330通过无线连接直接或通过一个或多个网络进行通信。示例性的直接无线连接包括蓝牙、蓝牙低能耗、近场通信(“nfc”)和其它合适的无线连接。控制器302和便携式操作员装置330各自包括相应的收发器314和342。
91.便携式操作员装置330和控制器302中的至少一者与便携式操作员装置330和控制器302中的另一者交换信息,以确定操作员是否具有进入存储容器100的内部114的有效凭证。在实施例中,控制器302从便携式操作员装置330接收信息,并确定该信息指示有效凭证(准许进入)还是无效凭证(拒绝进入)。在实施例中,便携式操作员装置330从控制器302接收信息,并确定该信息是指示有效凭证(准许进入)还是无效凭证(拒绝进入)。在实施例中,便携式操作员装置330和控制器302中的一者可操作地联接到远程计算装置,并且来自便携式操作员装置330和控制器302中的一者或两者的信息被提供给远程计算装置,该远程计算装置确定该信息指示有效凭证(准许进入)还是无效凭证(拒绝进入)。在门锁200的图示实施例中,需要有效凭证来将门锁200从锁定状态(拒绝进入)转变到解锁状态(允许进入)以及从解锁状态(允许进入)转变到锁定状态(拒绝进入)。
92.参考图3b,控制器302控制电从电源350流到致动器304。示例性电源350包括电池
和其它合适的电力存储装置。在所示实施例中,致动器304是电动马达352,电动马达352具有可绕轴线354旋转的输出轴。小齿轮356联接到马达352的输出轴并与马达352的输出轴一起旋转。
93.锁定组件底座360将电动马达352支撑在吊架362中。在实施例中,马达352胶合到吊架362,通过一个或多个紧固件联接到吊架362,和/或以其它合适的方式联接到吊架362。销364被接收在锁定组件底座360的开口366中和小齿轮356的一端。销364支撑小齿轮356的一端。控制器302控制电动马达352的输出轴的旋转方向,从而控制小齿轮356在绕轴线354的方向370或绕轴线354的方向372上的旋转方向。
94.保持器308包括基底380和从基底380延伸的突起382。保持器308的突起382被接收在后安装支架222的开口384中。基底380位于后安装支架222的上凸缘386与下凸缘388之间。在某些实施例中,后安装支架222由金属片制成,并且上凸缘386和下凸缘388形成为后安装支架222中的弯曲部。
95.上凸缘386和下凸缘388中的每一者都包括接收相应销392的孔口390(见图3b)。销392穿过相应的偏压构件396,其示意性地为扭转弹簧398的线圈部分394,如图2a所示。相应的扭转弹簧398的一部分400压在保持器308的后侧402上从而在与方向406相反的方向404上偏压保持器308。
96.回到图3b,滑动件232包括第一凹部410和第二凹部412。当螺栓204处于图1a和图6的伸出位置时,由于扭转弹簧398在方向404上的偏压,保持器308的突起382被接收在滑动件232的第二凹部412中。当螺栓204处于图1b和图8的缩回位置时,由于扭转弹簧398在方向404上的偏压,保持器308的突起382被容纳在滑动件232的第一凹部410中。突起382、第一凹部410和第二凹部412中的每一者都具有倾斜轮廓,这允许突起382在滑动件232在方向250和方向252中的一个方向上移动时移出第一凹部410或第二凹部412中的任一者。随着突起382移出第一凹部410或第二凹部412中的任一者,保持器308克服扭转弹簧398的偏压而在方向406上移动。
97.保持器308包括凹部430,凹部430接收阻挡件306的凸片432(见图2a)。阻挡件306的凸片432可以通过致动器304在方向434上升高或在方向436上降低。阻挡件306包括基底438,凸片432从基底438伸出。基底438进一步包括齿条440。齿条440与致动器304的小齿轮356相互啮合,如图2a所示。通过在方向370上旋转小齿轮356,控制器302将阻挡件306相对于保持器308升高到使得凸片432从保持器308的凹部430中移除(见图5)的水平,由于保持器308能够相对于阻挡件306在方向406上移动,该水平是阻挡件306的释放位置。通过在方向372上旋转小齿轮356,控制器302将阻挡件306相对于保持器308降低到使得凸片432被接收在保持器308的凹部430中(见图4)的水平,由于保持器308不能相对于阻挡件306在方向406上移动,该水平是阻挡件306的阻挡或锁定位置。当保持器308的突起382被接收在滑动件232的第一凹部410和第二凹部412中的一个凹部时,保持器308的凹部430与阻挡件306的凸片432竖直对齐。
98.参考图6
‑
图12,示出了门锁200的操作。如图6和图9所示,螺栓204处于伸出位置,其中保持器308的突起382被接收在滑动件232的第二凹部412中。此外,阻挡件306的凸片432被接收在保持器308的凹部430中。由于阻挡件306和保持器308的阻挡或锁定位置,操作者不能在方向250上推动操作者可致动输入202,因为阻挡件306阻挡保持器308在方向406
上的移动。
99.如果确定输入装置320或便携式操作装置330(也可以通常被称为“输入装置”,因为它能够向电子控制器302提供输入)中的一者已经提供了有效凭证,则控制器302在方向370上旋转小齿轮356,以在方向434上将阻挡件306升高到其释放位置,其中阻挡件306的凸片432从保持器308的凹部430中移除,如图10所示。在阻挡件306的凸片432从保持器308的凹部430移除之后,操作者可以在方向250上推动操作者可致动输入202,这导致保持器308克服扭转弹簧398的偏压而在方向406上移动,如图7和图11所示。如图11所示,保持器308的凹部430不再与阻挡件306的凸片432竖直对齐。
100.当操作者继续在方向250上移动操作者可致动输入端202时,保持器308的突起382被接收在整体滑动件232的第一凹部410中,如图8和图12所示,其对应于致动器304处于缩回位置。控制器302沿着方向372旋转小齿轮356,以将阻挡件306的凸片432降低到保持器308的凹部430中;由此防止操作者在方向252上推动操作者可致动输入202,以再次将螺栓204移动到伸出位置。
101.在实施例中,门锁200包括至少一个传感器,诸如位置传感器,以监测保持器308的突起382何时在滑动件232的第一凹部410或滑动件232的第二凹部412中完全就位。控制器302可操作地联接到至少一个传感器。
102.如果操作者如图7所示仅部分地移动滑动件232并释放操作者可致动输入202,则门锁200将滑动件232移动到图6所示的位置。这种移动是由于偏压构件246(见图13)将滑动件232偏压到图6的位置而引起的。
103.在实施例中,控制器302在存储器312中存储门锁200被致动到锁定配置(见图1a和图6)和解锁配置(见图1b和图8)中的一者的凭证和日期/时间的审计跟踪。审计跟踪可被传送到便携式操作员装置330,用于审查或随后传输到远程计算装置。
104.图15
‑
图35示出了本公开的可替换实施例。更特别地,示出了门锁200a。贯穿本公开,各种实施例的相关元件用相同的附图标记标识,但是也可以包括字母指示符来区分各种实施例。带有相同附图标记(带有或不带有字母指示符)的元件具有相似的功能,但不一定是相同或甚至相似的结构。门锁200a提供与门锁200相同的功能,即,门锁200a控制将门110(当安装门锁200a代替如图1a和图1b所示的门锁200时)从关闭位置移动到打开位置的能力。门锁200a包括可从存储容器100的外部接近的操作者可致动输入202a(图18、图20
‑
图22和图28)。通过致动操作者可致动输入202a(其将在下文中进一步描述),门锁200a的螺栓204a从伸出位置(图16、图22、图23a、图26、图27、图30和图32)移动到缩回位置(图15、图23、图24、图25、图29、图31和图33)。当螺栓204a处于伸出位置时,螺栓204a的第一端208a被接收在存储容器100的凹部中,以阻止门110在方向112上旋转(图1a)或阻止门110竖直运动。以这种方式可操作地与门锁200a协作的凹部是与门锁200结合的图6所示的凹部120。类似于图8所示的门锁200的布置,当锁200a的螺栓204a处于缩回位置时,螺栓204a的第一端208a位于凹部(例如,存储容器100的凹部120)的外部,并且不阻挡所附接的门的致动。基于其交替地阻挡(当伸出时)和允许(当缩回时)其所附接的门移动的能力,螺栓204a可以被称为“阻挡件”。
105.例如,如图15、图16、图20、图22和图28所示,锁200a包括前安装支架220a和中间安装支架221a。图28还示出了后安装支架222a。类似于图2a和图2b所示的锁200的布置,前安
装支架220a可以放置在门110的前侧122(见图6)上,并且后安装支架222a可以放置在门110的后侧124(见图3a和图6)上。在使用中,前安装支架220a和后安装支架222a可以固定到门110。在图3a所示的实施例中,门110包括多个孔口130,前安装支架220a包括可与门110的多个孔口130对齐的多个孔口226a(图20)。中间安装支架221a和后安装支架222a(图28)各自包括对应于孔口226a(图20)且还可与门110的多个孔口130对齐的多个孔口。紧固件(未示出)穿过相应的对齐的多套孔口,以将前安装支架220和后安装支架222保持在门110。
106.示例性紧固件包括螺栓,螺栓具有位于前安装支架220a顶部的头部和延伸超过后安装支架222a的螺纹轴。螺栓用螺母固定。螺栓头部的形状防止工具被应用到存储容器100的外部从而从螺栓上松开螺母。其它示例性紧固件包括焊件、前安装支架220a的凸片以及其它合适的结构,前安装支架220的凸片穿过门110并固定到后安装支架222a,其它合适的结构用于将前安装支架220和后安装支架222中的一者或两者固定到门110。
107.参考图15、图16和图28,前安装支架220a包括u形孔口240a,u形孔口240a接收保持器308a的凸台500。操作者可致动输入202a被固定到凸台500,并可操作以通过u形孔口240a致动凸台500。凸台500可以通过过盈配合固定到操作者可致动输入。参考图20,凸台500可在子组件504的狭槽502中被竖直地致动。如图24
‑
图27和图29所示,狭槽502形成在子组件504的面板506中。狭槽502的尺寸相对于凸台500设计,以允许凸台500竖直地行进穿过竖直定向的狭槽502,同时防止凸台500横向移动。
108.凸台500从子组件504延伸穿过面板506的狭槽502,并且足够长以延伸穿过前安装支架220a的u形孔口240a并接合操作者可致动输入202a。当操作者可致动输入202a固定到凸台时,在前安装支架220a的u形孔口240a允许时,子组件504可以自由地横向滑动,即沿着方向250a和252a(图15和图16)滑动。在所示位置,例如图15和图24所示位置,保持器308a可在子组件504内沿着方向434a和436a竖直地往复运动。弹簧550(图34和图35)沿着方向434a竖直地偏压保持器308a,使其与子组件504的上止动表面510接合。弹簧550可以定位在保持器308a的孔口(未示出)中,以允许保持器308a克服弹簧力被致动,直到保持器308a抵靠下止动表面508。该示例性实施例的弹簧是压缩弹簧,其一端抵靠保持器308a被定位(在某些实施例中,在内部孔口的内端),并且其另一端抵靠子组件504的下止动表面508被定位。
109.主要参考图15和图20,当子组件504夹在前安装支架220a与中间安装支架221a之间时,子组件504的尺寸和形状被设计成沿着方向250a和252a横向平移。更特别地,子组件504的尺寸和形状被设计成在中间安装支架221a的凹槽512内沿着方向250a和252a平移。凹槽512允许位于其中的子组件504横向移动,同时防止子组件504竖直移动以及旋转移动。子组件504在凹槽512内平移带来螺栓204a伸出或缩回。具体而言,子组件504沿着方向250a从图15和图24所示的位置平移到图16和图26所示的位置使螺栓204a伸出。相反,子组件504沿着方向252a从图16和图26所示位置平移使螺栓204a缩回。子组件504平移带来螺栓204a平移,因为螺栓204固定到子组件504以与其一起平移。
110.主要参考图17和图20,后安装支架222包括狭槽514。狭槽514包括竖直定向的进入支腿516和行进支腿518。竖直定向的进入支腿516允许滑动件232与中间安装支架221a组装。如图17、图20和图21所示,在滑动件232与中间安装支架221a分离后,滑动件232a的引导凸片520在狭槽514的进入支腿516的后面对齐。从该位置,滑动件232沿着方向404a(图21)相对于中间安装支架221a移动,直到滑动件232a的引导凸片被定位成穿过狭槽514的进入
支腿516,并且滑动件232a与中间安装支架221a的背面齐平,如图31所示。在该位置,随着引导凸片520在狭槽514的行进支腿518中行进(ride),滑动件232a可以沿着方向250a、252a相对于中间安装支架221a平移。
111.图31示出了滑动件232a在狭槽514的行进支腿518的第一端处于一个行进极端。图31所示的位置对应于螺栓204a的缩回位置。图23a和图30中示出了滑动件232a在狭槽514的行进支腿518的第二端处于另一个行进极端。图23a和图30所示的位置对应于螺栓204a的伸出位置。
112.在滑动件232a的引导凸片520可操作地被定位在狭槽514中(如上所述)之后,子组件504可以可操作地连接到滑动件232a。参考图27,子组件504包括尺寸设计成牢固地接收引导凸片520的凸片狭槽522。凸片狭槽522可以利用形成凸片狭槽的子组件的壁与引导凸片520之间的摩擦接合来接收引导凸片520。当子组件504在组装期间旋转到凹槽512中时,这种摩擦接合将允许子组件504相对于引导凸片520轻微旋转移动。
113.为了将子组件组装到中间安装支架221a和滑动件232,子组件504相对于中间安装支架221a和滑动件232的子组件定位(图23a),其中凸片狭槽522与滑动件232a的引导凸片520对齐,如图27所示。从该位置,子组件504可以随着前缘524(图21)沿着方向406a(图21)移动而移动。更具体地,前缘524可以沿着中间安装支架221a的弯曲引导表面526,接着沿着中间安装支架221a的基本竖直的引导表面528,直到引导凸片520到达子组件504中的凸片狭槽522的口的方式行进(ride)。此时,子组件504的尾部边缘530搁置在弯曲的引导表面526的顶上。然后旋转子组件504,其中凸片520进入凸片槽522并且尾部边缘530沿着弯曲的引导表面526行进,直到达到图24
‑
图26所示的子组件504的最终就位位置。
114.在最终就位位置,子组件504基本填满中间安装支架221a的凹槽512,留有足够的间隙以使子组件504沿着方向250a和252a横向移动。在该位置,前安装支架220a可以可操作地定位成用于固定到中间安装支架221a和后安装支架222a,如上所述。在前安装支架220a固定到中间安装支架221a之后,子组件504被夹在前安装支架220a与中间安装支架221a之间,留有足够的间隙用于子组件504相对于中间安装支架221a的横向移动,如上所述。子组件504的横向移动由形成凹槽512的中间安装支架221a的壁来引导,所述壁包括弯曲的引导表面526和基本竖直的引导表面528以及定位在子组件504的顶上的前安装支架220a的下表面。
115.在子组件504可操作地就位之后,如图15所示,操作者可致动输入202a可以固定到凸台500。在子组件504可操作地就位之后,引导凸片520在凸片狭槽522中就位用于将滑动件232a保持在中间安装支架221a的背面。在中间安装支架221a固定在门顶上之后,滑动件232a夹在门与中间安装支架221a之间。相对的引导表面532、534可用于引导螺栓204a沿着方向250a和252a横向移动。参考图30
‑
图33,中间安装支架221a包括弹簧止动件536,并且滑动件232a包括弹簧止动件538,弹簧540(仅在图32和图33中示出)位于弹簧止动件536与弹簧挡块538之间。弹簧540是将螺栓204a偏压到伸出位置的偏压构件。更特别地,弹簧540是在弹簧止动件536、538之间被压缩的压缩弹簧,其中当螺栓204从伸出位置移动到缩回位置时需要进一步压缩弹簧540。弹簧540由中间安装支架221a以及滑动件232a的弹簧凸片542引导。
116.螺栓204a在缩回位置(例如,参见图15、图33和图31)与伸出位置(例如,参见图16、
图32和图30)之间的致动通过操作者可致动输入202a将保持器308a的凸台500从孔口240a的一端移动到另一端来实现的。保持器308a不能相对于子组件504的其余部件横向移动(即,沿着方向250a和252a的移动);因此,凸台500在孔口240a中横向移动带来子组件504在中间安装支架221a的凹槽512中侧向移动,该侧向移动进而带来螺栓204a在缩回位置与伸出位置之间侧向移动,这是由于滑动件232a的凸片520固定在子组件504的凸片狭槽522中。因此,由于螺栓204可以被称为“阻挡件”,所以引导凸片232a、滑动件232a的将引导凸片232a连接到螺栓204a的部分、子组件504(包括凸台500)和操作者可致动输入都是“阻挡件致动器”,并且这些元件协作来致动阻挡件。只要每个列出的元件可操作地连接到螺栓204,每个列出的元件本身就可以被称为“阻挡件致动器”。
117.在螺栓204a的缩回位置,凸台500占据孔口240的缩回立柱544。在螺栓204a的伸出位置,凸台500占据孔口240a的伸出立柱548。凸台500穿过缩回立柱544与伸出立柱548之间的孔口240的横向位移基底而行进。如下文将进一步描述的,凸台500沿着方向434a向上偏压;因此,如果凸台500占据孔口240的缩回立柱544,则它被迫向上并被锁定防止如图15所示的横向移动。类似地,如果凸台500占据孔口240a的伸出立柱548,则它被迫向上并被锁定以防止如图16所示的横向移动。当凸台500被锁定防止横向移动时,它处于阻挡位置以阻挡螺栓204a的致动。当凸台500能够横向移动(在孔口240a的位移基底546中)时,它处于允许致动螺栓204a的解锁位置。为了沿着孔口240a的横向位移基底546移动凸台500,凸台500必须克服(如上所述的)弹簧550的偏压力被推入孔口240a的横向位移基底546中。保持器308a的竖直移动被采用轴承552形式的保持器阻挡件选择性地阻挡。在图示的范例中,轴承552是滚珠轴承,如图19、图24
‑
图27、图29、图34和图35所示。
118.图19、图24
‑
图27和图29示出了子组件504,其面板506被移除以露出包含在子组件壳体内的子组件504的各部件。在图34所示的止动位置,滚珠轴承552位于保持器308a与子组件504的壳体的壁554之间,以为保持器308a往复运动创造物理屏障。为了将滚珠轴承552从图34所示的位置移开,控制器302a致动电动马达352a,以在沿着使电枢556沿着方向252a撤回的方向上旋转输出轴560。电动马达352a的输出轴560被螺纹拧入电枢556,并且电枢556通过子组件504的壳体的内壁(包括面板506)而被防止旋转;因此,电动马达352a的输出轴560的旋转导致电枢556沿着方向252a线性位移。电动马达352a可以是电池供电的电动马达,其由容纳在电池室564中的电池(未示出)供电。
119.电枢556承载磁体558,磁体558产生吸引轴承552的磁场。当电枢556沿着方向252a从图34所示的位置移动到图35所示的位置时,源自磁体558的磁力将轴承552从图34所示的位置拉到图35所示的位置。如果正好在马达352a致动之前保持器308a被迫沿着方向436a向下(其中电枢如图34所示定位),则当保持器308a将轴承552压靠在壁554上时产生的摩擦力可能足以克服电枢556与轴承552之间的磁引力。如果发生这种情况,则轴承552将保持在防止保持器308a致动的适当位置,直到摩擦力通过不再沿着方向436a向凸台500施加力而被释放。当摩擦力被释放时,轴承552将屈服于来自磁体558的力,并行进到图35所示的位置。当轴承552保持在图35所示的位置时,保持器308a可以通过连接到凸台500的操作者可致动输入202a克服弹簧550的偏压力移动,以允许凸台500穿过孔口240a移动,从而在缩回位置与伸出位置之间致动螺栓204a,如上所述。
120.锁200a的操作可以从处于固定状态的螺栓开始,其中螺栓204a处于伸出位置,如
图16、图26、图27和图32所示,凸台500占据伸出立柱548(图16)的最上延伸部分,并且轴承552阻挡保持器308a的致动(图34)。从这个位置,需要有效凭证来将锁200a致动到非固定状态。
121.如图34所示,(包括与上述控制器302相同的元件和功能的)控制器302a连接到输入装置320和便携式操作员装置330a。输入装置320a和便携式操作员装置330a的结构和功能与输入装置320和便携式操作员装置330的结构和功能相同,除了输入装置320a和便携式操作员装置330a用于控制锁200a,而不是由输入装置320和便携式操作员装置330控制的锁200。因此,为了简洁起见,此处不再重复对输入装置320a和便携式操作员装置330a的描述。
122.如果确定输入装置320a或便携式操作装置330a中的一者已经提供了有效凭证,则控制器302a致动电动马达352a,以将电枢556从如图34所示的位置平移到如图35所示的位置。在保持器阻挡件(即轴承552)从阻挡保持器308a的致动的阻挡位置移除之后,操作者可致动输入202a可以用于将凸台500从图16所示的位置致动到图15所示的位置,以将螺栓204a从伸出位置移动到缩回位置。在该位置,控制器302将操作马达352a,以再次将电枢556和轴承552定位在图35所示的位置。
123.传感器562可用于向控制器302a发出信号,信号即保持器308a已经返回到其抵靠上止动表面510的正常偏压位置。当这种情况发生时,控制器302a致动马达352a,再次将电枢556和轴承552定位在图35所示的位置。由于螺栓204a处于伸出位置,将再次需要有效凭证来致动马达352a并允许将锁200a放置在锁定位置。这创建了锁200a的状态的审计跟踪。传感器562可以是,例如接近传感器或光学传感器。
124.当从螺栓204a的伸出位置移动到缩回位置时,必须克服弹簧550的偏压力(图34和图35)以及弹簧540的偏压力(图32和图33)。一旦凸台500与孔口240的缩回立柱544对齐,弹簧550将推动凸台500进入图15所示的锁定位置。当从螺栓204a的缩回位置移动到螺栓204a的伸出位置时,只有克服弹簧550的偏压力是必须要克服的。一旦凸台500从孔口240的缩回立柱544移动到与孔口240的横向位移基底546对齐,则弹簧540将作用以将凸台500偏压成与孔口240的伸出立柱548对齐,然后弹簧550将凸台500偏压到图16所示的锁定位置。弹簧540和550的偏压力可以被设置成使得操作者只需要(通过操作者可致动输入202a)按压凸台500使其与孔口240的横向位移基底546对齐,此时,弹簧540和550将协作以将凸台500卡入图16所示的位置。
125.图36
‑
图53示出了本公开的另一可替换实施例。更特别地,示出了门锁200b。门锁200b提供与门锁200和200a相同的功能,即门锁200b控制门110(当安装门锁200b代替如图1a和图1b所示的门锁200时)从关闭位置移动到打开位置的能力。门锁200a包括可以从存储容器100的外部接近的操作者可致动输入202b。通过操作者可致动输入202b(其将在下文中进一步描述)的致动,门锁200b的螺栓204b从伸出位置(图36
‑
图38、图41和图43)移动到缩回位置(图44)。
126.当螺栓204b处于伸出位置时,螺栓204b的第一端208b被接收在存储容器100的凹部中,以防止门110在方向112上的旋转(图1a)或门110的竖直运动。以这种方式可操作地与门锁200b协作的凹部是与门锁200结合的图6所示的凹部120。类似于图8所示的门锁200的布置,当锁200b的螺栓204b处于缩回位置时,螺栓204b的第一端208b位于凹部(例如,存储容器100的凹部120)的外部,并且不阻挡与其附接的门的致动。基于螺栓204a的交替地阻挡
(当伸出时)和允许(当缩回时)所附接的门移动的能力,螺栓204a可以被称为“阻挡件”。
127.如图36
‑
图38所示,锁200b包括前安装支架220b和中间安装支架221b。图38还示出了后安装支架222b。类似于图2a和图2b所示的锁200的布置,前安装支架220b可以放置在门110b的前侧122b(见图38)上,并且后安装支架222b可以放置在门110b的后侧124b上。使用时,前安装支架220b和后安装支架222b可以固定到门110b。在图38所示的实施例中,门110b包括多个孔口130b,前安装支架220b包括可与门110b的多个孔口130b对齐的多个孔口226b(图39),并且后安装支架222b包括也可与门110b的多个孔口130b对齐的多个孔口228b(图38)。螺栓600穿过多套相应对齐的孔口130b、226a和228a,以将前安装支架220和后安装支架222固定于门110。中间安装支架221b包括允许螺栓600通过的对应的一套孔口602(图39)。
128.类似于图6所示的实施例,螺栓204b在使用中位于门110b的前侧附近并沿着门110b的前侧被致动,以定位在类似于图6所示的凹部120的凹部中或从该凹部中取出。这与标准的锁定螺栓锁不同,例如,在标准的锁定螺栓锁中,螺栓沿着门的厚度(即,在门的正面与背面之间)形成的孔口中伸出,并缩回到该孔口中。为了沿着方向250b、252b(图41和图42)在门的第一侧顶上致动螺栓204b,操作者可致动输入202b接收来自用户的输入运动,以沿着方向250b、252b铰接操作者可致动输入202b。
129.图41示出了位于中间安装支架221b与前安装支架220b之间的滑动件232b。在该位置,滑动件232b能够沿着方向250b、252b分别在螺栓204b的伸出位置与螺栓204b的缩回位置之间往复运动。为了实现这样的往复运动,用户可以抓住操作者致动的螺栓输入202b,以沿着方向250b、252b中的一个方向移动滑动件232b。滑动件232b的这样的往复运动可以由接收滑动件232b的锁定组件壳体604中形成的纵向通道引导。滑动件232b也可以被接收在前安装支架220b的相对引导表面532b、534b之间,以引导滑动件232b进行往复运动。在可替换实施例中,锁定组件壳体604和滑动件232b形成可与各种安装支架一起使用的机电子组件,这些安装支架具有与可替换门孔洞形态匹配的各种孔洞形态。
130.电池盖676可以通过电池盖螺钉678相对于前安装支架220b固定,并且可以承载辅助pcba680,该辅助pcba680在电池盖676最终就位时自动连接到头部682。头部682将辅助pcba连接到承载控制器302b的主pcba。通过这种方式,可以更换电池室盖以添加可替换的辅助pcba,从而增加功能,诸如新的无线电、传感器或用户界面。当电池盖螺钉678暴露时,进入电池室不允许进入锁定机构或主pcba。电池盖螺钉678可以设计成仅由专用工具致动。在本公开的所有实施例中,控制器302、302a或302b通过将电动马达电连接到相应实施例的电池来控制电动机352、352a或352b的致动。
131.锁定组件200b可以可替换地用于将螺栓204b保持在伸出位置或缩回位置中的一者。滑动件232b包括形成在其中的哑铃形切口606。包含凸轮608的保持器308可以选择性地用于保持滑动件232b的主体在操作者可致动输入202b与螺栓204b之间的位置,其也可以恰当地称为阻挡件致动器,因为它能够在缩回位置与伸出位置之间致动螺栓204b(“阻挡件”)。具体而言,凸轮608可以位于哑铃形切口606的任一球形端612、614中,并且被定向成使得凸轮纵向轴线610与方向250b、252b(如图43和图44所示)正交,以防止滑动件232b沿着方向250b和252b中的任一者的致动。为了允许滑动件232b的致动,凸轮纵向轴线610必须被定位成与方向250b、252b基本平行,以允许凸轮608穿过哑铃形切口606的横向位移通道
616。
132.图47
‑
图51示出了基本平行于方向250b、252b定向的凸轮纵轴610的布置。在构造中,凸轮608定位成配合在滑动件232b的深度内。换句话说,凸轮608的顶部表面基本与围绕哑铃形切口606的滑动件232b的顶部表面共面,并且凸轮608的底部表面类似地基本与围绕哑铃形切口606的滑动件232b的底部表面共面。以这种方式,凸轮608可以充当保持器,其可选择性地定位到阻挡位置(参见,例如,图43和图44)以阻挡阻挡件致动器致动阻挡件(即,螺栓204b),并且凸轮608还可定位在未阻挡位置(参见图47
‑
图51),以允许阻挡件致动器致动阻挡件。
133.参考图42,阻挡组件300b进一步包括具有开口中心620的蜗轮618,径向突起622延伸到开口中心620中。凸轮驱动轴624被定位于蜗轮618的开放中心620的中心。凸轮驱动轴624包括键接成随其旋转的间隔开的止动板626、628。更特别地,中心孔口630、632具有与凸轮驱动轴624的横截面形状匹配的横截面形状。扭转弹簧634位于下止动板626与上止动板628之间。具体地,扭转弹簧634围绕凸轮驱动轴624定位,其中凸轮驱动轴624穿过扭转弹簧634的中心孔口638定位。在某些实施例中,扭转弹簧634可用于促进将下止动板626与上止动板628间隔开。扭转弹簧销640固定在下止动位置262与上止动板628之间。扭转弹簧销640可以过盈配合在止挡板626、628的孔口642、644内。扭转弹簧销640可以在其每一端结合径向凸缘,以进一步促进下止动板626与上止动板628沿着方向404a、406a适当地间隔开。任选地,间隔件636可以定位在下止动位置626与上止动板628之间,以进一步实现其沿着方向404a、406a适当地间隔开。
134.当可操作地组装时,下止动板626、上止动板628以及定位于它们之间的部件(扭转弹簧销640、扭转弹簧634以及任选的间隔件636)被定位于蜗轮618的开口中心620内,并且可与凸轮驱动轴624一起绕蜗轮618的纵向轴线646旋转。电动马达352b的驱动轴560b布置成与蜗轮618的齿648相互啮合,使得电动马达352b的致动导致蜗轮618围绕蜗轮618的纵向轴线646旋转。在构造中,上扭转弹簧臂650和下扭转弹簧臂652围绕蜗轮618的纵向轴线646相对于彼此旋转,直到扭转弹簧634被预加载并且扭转弹簧臂650、652邻接扭转弹簧销640和蜗轮618的径向突起622,如图46所示。
135.凸轮608可在球形端612、614内由止动表面654、656、658、660设定的限定内旋转。当凸轮608旋转到与延伸球形端614的锁定止动表面658邻接接触时,滑动件232b被锁定在伸出位置。这种布置如图45和图46所示。如图47和图48所示,凸轮608可以从该位置绕蜗轮618的纵向轴线646旋转脱离与锁定止动表面658的邻接接触,并形成与解锁定止动表面660的邻接接触。类似地,当凸轮608占据收缩的球形端612时,凸轮608可以定位成与锁定止动表面654邻接接触,以使滑动件232b,并因此使螺栓604b保持在缩回位置。这种布置如图52和图53所示。凸轮608可以通过绕蜗轮618的纵向轴线646旋转而脱离与锁定止动表面654的邻接接触。更特别地,凸轮608可以旋转离开锁定止动表面654,并旋转形成与解锁定止动表面656邻接接触,以允许滑动件232b相对于凸轮608平移。
136.锁200b的操作可以从处于固定状态的螺栓204b开始,其中螺栓204a处于图36、图37、图41和图43所示的伸出位置,并且凸轮608邻接延伸球形端614的止动锁定表面658。从这个位置,需要有效凭证来将锁200b致动到非固定状态。
137.如图41所示,控制器302b由主pcba(印刷电路板组件)承载。控制器302b包括与上
述控制器302、302a相同的元件和功能;因此,为了简洁起见,现在不再详细描述控制器302b的结构和功能。控制器302b连接到输入装置320b和便携式操作员装置330b。输入装置320b和便携式操作员装置330b的结构和功能与输入装置320和便携式操作员装置330的结构和功能相同,除了输入装置320b和便携式操作员装置330b用于控制锁200b,而不是由输入装置320和便携式操作员装置330控制的锁200。因此,为简洁起见,此处不再重复对输入装置320b和便携式操作装置330b的详细描述。
138.如果确定已由输入装置320b或便携式操作装置330b中的一者提供了有效凭证,则控制器302b可以致动马达352b来定位凸轮608,使其纵向轴线610与方向252b对齐,如图47和图48所示,以允许螺栓204b缩回。如上所述,通过将凸轮608放置成与延伸球形端614的锁定止动表面658成邻接关系,实现了将螺栓204b锁定在伸出位置。为了防止凸轮608旋转脱离与锁定止动表面658的邻接接触,蜗轮618可以旋转到图45所示的位置。在该位置,蜗轮618的径向突起622邻接止动板626、628的锁定止动表面662、664,如图45所示。在该位置,禁止凸轮608绕蜗轮618的纵向轴线646旋转。当凸轮608如图45所示定位之后提供有效凭证时,马达352b将从图45所示的位置致动蜗轮618,通过图46和图47所示的位置,直到到达图48所示的位置。
139.在从图45所示位置转换到图48所示位置的过程中,扭转弹簧634在凸轮608上施加不同的偏压。在图45中,扭转弹簧634将凸轮608偏压成与锁定止动表面658成邻接关系(图42)。当蜗轮618从图45所示的位置绕纵向轴线646旋转90
°
旋转到图46所示的位置时,该弹簧偏压不断减小。当蜗轮618处于图46所示的位置时,扭转弹簧634的偏压力必须被克服,以将凸轮608旋转到图47所示的位置。当蜗轮618从图46所示的位置再旋转90
°
旋转到图47所示的位置时,径向突起622将扭转弹簧臂652从图46所示的位置旋转到图47所示的位置。在该旋转期间,扭转弹簧臂650用于利用扭转弹簧634对扭转弹簧销640的偏压力将凸轮驱动轴624(其键接到止动板626、628)旋转到图47所示的位置。在该位置,凸轮608放置成与延伸球形端614的解锁定止动表面660成邻接关系。从该位置,马达352b的致动继续,使蜗轮618的径向突起622克服扭转弹簧634的偏压力旋转。当径向突起622抵靠止动板626、628的返回止动表面668、670时,马达352b的致动停止并且因此蜗轮618的径向突起622停止(旋转),如图48所示。参考图41,传感器672可以定位在凸轮驱动轴624的与凸轮608相对的一端周围,并穿过承载控制器302b的主pcba。在该位置,传感器672可用于感测保持器308的旋转位置,并因此感测凸轮608的位置。传感器672可以为例如光学传感器。
140.如图48所示加载了弹簧之后,凸轮608被偏压进一步旋转90
°
,然而其由凸轮608与解锁定止动表面660的接触所阻止。在已经提供了适当的凭证并且电动马达352b被致动到图48所示的位置之后,操作者可以抓住操作者可致动输入202b,以将螺栓204b从伸出位置横向致动到缩回位置。这种致动开始于滑动件232b沿着方向252b从图48所示的位置移动到图49所示的位置。如图49所示,当凸轮608从与解锁定止动表面660的邻接接触横向移位时,它转变成哑铃形切口606的横向移位通道616,如图49所示。在该位置,形成横向位移通道616的相对壁防止凸轮608旋转。因此,由于扭转弹簧634向凸轮608供应偏压力,凸轮608(通过操作者可致动输入202b的致动)从图48所示的位置行进通过图49、图50和图51所示的位置。当凸轮608脱离形成横向位移通道616的壁时,由于凸轮608邻接收缩的球形端612的锁定止动表面654以将滑动件232b锁定在缩回位置,该偏压力自动地将凸轮608从图51所示的
位置致动到图52所示的位置。以这种方式,马达352b的单次致动可用于解锁闩锁螺栓204b,以允许其缩回,并进一步将闩锁螺栓204b锁定在缩回位置。为了锁的安全性,传感器(未示出)可以用来发出凸轮608已经达到图52所示位置的信号。从该位置,在径向突起622旋转到与止动板626、628的返回止动表面668、670邻接接触致动,马达352b可以被进一步致动到图53所示的位置,如图53所示。
141.由于螺栓204b处于伸出位置,再次需要有效凭证来致动马达352b以及允许将锁200b放置在锁定位置。这创建了锁200a的状态的审计跟踪。在凸轮608和蜗轮618如图53所示定位之后,有效凭证的提供将激活马达352b,以使蜗轮618从图53所示的位置旋转,通过图52所示的位置,并最终到达如下位置,该位置是凸轮608抵靠收缩的球形端612的解锁止动表面656并且蜗轮618逆着扭转弹簧臂650的旋转引起90
°
的弹簧预载的位置。虽然未示出这个位置,但它反映图48所示的位置。从该位置,操作者可致动输入202b可用于延伸螺栓204b,直到凸轮608占据延伸球形端614,并且扭转弹簧634的偏压力导致凸轮608定位成与锁定止动表面658邻接接触。与螺栓204b的缩回一样,在径向突起622邻接锁定止动表面662和664并且凸轮608完全被限制绕蜗轮618的纵向轴线646在任一方向上旋转之后,传感器可以用于发出螺栓204b完全伸出的信号,然后致动马达352b进入图45所示的位置。类似于上文关于锁200、200a所述的偏压布置,弹簧674(图43和图44)可以用于将螺栓204b偏压到伸出位置。
142.虽然本发明已经被描述为具有示例性设计,但是本发明可以在本公开的精神和范围内进一步修改。因此,本技术旨在涵盖利用本发明的一般原理的任何本发明的变型、用途或改型。此外,本技术旨在涵盖在本发明所属领域中的已知或惯用实践范围内的对本公开的这样的偏离。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。