1.本发明涉及了一种基于前视摄像头的转向辅助系统,尤其是涉及了一种基于前视摄像头的转向辅助系统及控制方法。
背景技术:
2.随着世界范围内各国生活水平的提高,汽车保有量持续地增加,同时各类交通事故以及由此引发的人员伤亡和财产损失案例也不断增长。我国道路交通较为复杂,车型也相对复杂,有关数据表明,大约30%的事故是侧面碰撞事故。侧面碰撞事故致死率仅次于正面碰撞,而致伤率却位居第一。
技术实现要素:
3.为了解决背景技术中存在的问题,本发明所提供一种基于前视摄像头的转向辅助系统及控制方法,能有效减少碰撞事故的发生,保护人员和财产安全。
4.本发明主要针对在本车要转向时,若对向有来车,当驾驶员无法较好地判断若两车都不进行减速是否会发生碰撞的情况下,能够避免这种人为模糊的判断而发生碰撞事故的情况。
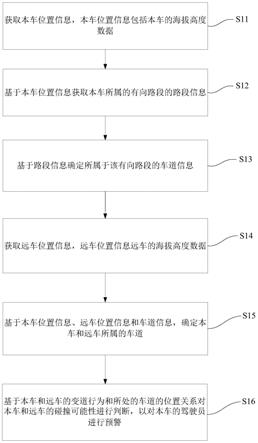
5.如图1所示,本发明采用的技术方案是:
6.本系统主要依靠安装在车辆前挡风玻璃的前视摄像头对前方的路况信息进行感知监控,安装在车辆前挡风玻璃的前视摄像头可以识别到对向来车,再通过本车车身can网络得到本车的行驶状态,结合前视图像来得到对向来车的行驶信息,进而可以得到两车预期的行驶轨迹/路径。
7.当遇到行驶到路口将要转弯时,系统检测到转向灯信号判断出车辆将要进行左转或者进行右转,并且前视摄像头识别到对向车道有直行车辆驶来,本系统可以通过前视摄像头图像计算出对向车速度从而得到其预期的直行路径并结合本车的预期左转路径,判断出是否会发生碰撞或是两车离的过近形成较为危险的交汇,然后这个结果判定会输送给中控屏,通过中控屏显示预警图标并发送语音提示预警信息给驾驶员能否在对向车之前左转行驶通过路口,减少碰撞事故的发生。
8.通过这种准确判断预期路径是否合理并给驾驶员以提示预警信号的方式,本系统能够较为有效的减少此类在左转时的碰撞事故的发生,避免人员伤亡和财产损失。
9.本发明的有益效果是:
10.一、一种基于前视摄像头的转向辅助系统
11.包括前视摄像头,前视摄像头安装在车前方,拍摄车前方图像并识别对向来车,获得对向来车的相关数据发送给系统主控;
12.包括系统主控,系统主控通过接收前视摄像头识别的对向来车的相关数据处理获得对向来车的车速和预期行驶路径,同时通过本车can网络得到本车的转向灯信号、车速信息、方向盘角度信息,并通过这些信息计算出本车在转向时的预期行驶路径,进而再根据对
向来车和本车的预期行驶路径判断出两车是否会发生碰撞事故,产生行驶控制信号进而控制本车的行驶工作。
13.所述前视摄像头安装在车挡风玻璃处。
14.还包括中控屏,所述的系统主控中根据判定结果向本车内的中控屏发送提示预警信号,中控屏从系统主控接收到提示预警信号后在屏幕上显示以给驾驶员进行提醒提示,进行转向辅助。
15.所述的转向辅助系统在本车上,通过本车车身前方布置的前视摄像头探测本车和对向来车之间的纵向距离和横向距离以及本车和对向来车之间的相对速度。纵向距离为沿行驶方向的距离,横向距离为沿垂直于行驶方向的距离。
16.本发明针对本车和对向来车在沿同一道路上相对相向行驶的情况,本车需要转弯,转弯侧有对向来车在相对本车不断靠近且直行的场景情况和问题,如图2所示。
17.二、应用于上述转向辅助系统的一种转向辅助控制方法:
18.通过前视摄像头实时获得当前本车和对向来车之间的距离、相对速度,按照以下进行判断处理:
19.车辆系统主控通过采集自身的车辆信息获得本车的速度v1和转弯半径r,经过时间t的本车车辆的转向角度θ按照以下公式获得:
[0020][0021]
其中,r为本车的转弯半径,v1表示本车的速度;
[0022]
根据通过前视摄像头实时获得的本车和对向来车之间的纵向距离x和横向距离y以及相对速度,结合本车的转向角度θ综合进行判断:
[0023]
若满足以下公式情况下,则判定本车先行转向通过,产生转向控制信号控制本车转向:
[0024][0025]
其中,d表示车间安全距离,v2表示对向来车的速度;
[0026]
若满足以下公式情况下,则判定对向来车先行通过,产生不转向直行控制信号控制本车不转向直行:
[0027][0028]
若均不满足上述两种公式情况下,则判定是两车若以当前状态行驶将发生碰撞或者交汇过于危险,产生制动控制信号控制本车制动减速,使得本车先减速等待对向来车先行。
[0029]
本发明主要解决了车辆在路口要左转时,若对向有来车,司机无法准确判断出能否先行通过,从而可能引发较为严重的碰撞事故。
[0030]
本发明有效的提高了车辆左转时和对向来车交汇的安全性,减少此类碰撞事故的发生。
附图说明
[0031]
图1为基于前视摄像头的转向辅助系统的流程图;
[0032]
图2为基于前视摄像头的转向辅助系统的实际路况示意图;
[0033]
图3为基于前视摄像头的转向辅助系统的两车坐标示意图,图中两车的行驶方向x的距离为x,横向坐标y的距离为y,本车沿半径为r的圆弧行驶,在圆弧上的角度为θ。
具体实施方式
[0034]
下面结合附图及具体实施例对本发明作进一步详细说明。
[0035]
具体实施的系统包括前视摄像头,前视摄像头安装在车挡风玻璃处,拍摄车前方图像并识别对向来车,获得对向来车的相关数据发送给系统主控;
[0036]
对向来车的相关数据包括本车和对向来车的纵向距离x和横向距离y以及相对速度,角度认为是理想的对向180
°
方向。
[0037]
包括系统主控,系统主控通过接收前视摄像头识别的对向来车的相关数据处理获得对向来车的车速、车向和预期行驶路径,同时通过本车can网络得到本车的转向灯信号、车速信息、方向盘角度信息,并通过这些信息计算出本车在转向时的预期行驶路径,进而再根据对向来车和本车的预期行驶路径判断出两车是否会发生碰撞事故或较危险的交汇,产生行驶控制信号进而控制本车的行驶工作;系统主控中根据判定结果向本车内的中控屏发送提示预警信号。
[0038]
包括中控屏,中控屏从系统主控接收到提示预警信号后在屏幕上显示以给驾驶员进行提醒提示,进行转向辅助。
[0039]
转向辅助系统在本车上,通过本车车身前方布置的前视摄像头探测本车和对向来车之间的纵向距离和横向距离以及本车和对向来车之间的相对速度。
[0040]
本发明的实例工作过程是:
[0041]
安装在车辆前挡风玻璃处的前视摄像头可以识别对向来车,结合本车的速度,通过对向来车的图像可以计算出对向来车的速度和位置。同时,根据自身车辆的速度和方向盘角度可以计算出本车的轨迹。
[0042]
当本系统主控检测到本车打左转向灯并方向盘转角在较短时间内向左打了一定的角度时,判定本车将要进行左转操作。此时,若有对向来车以一定的速度驶来,根据两车的预期路径计算出两车以当前状态继续行驶是否会发生碰撞事故或者当两车交汇时两车的距离过近太过于危险。本系统根据两车路径交汇的结果,给中控屏一个相应的提示预警信号。
[0043]
然后,中控屏根据给到的信号来给出相符合的反应,若两车可能发生碰撞或者交汇过于危险那么则会提示驾驶员先减速等待对向车先行通过后再左转,若本车可先行左转驶过且不会较危险地交汇那么会提示驾驶员可先行左转通过。
[0044]
本发明的具体实施转向辅助控制过程如下:
[0045]
通过前视摄像头实时获得当前本车和对向来车之间的距离、相对速度,按照以下进行判断处理:
[0046]
如图3所示,具体设置车辆前进方向为纵向,表示为x,横向为y。
[0047]
以转向角度平顺情况考虑,本车的转向轨迹近似为一段半径为r角度为的圆弧,车辆系统主控5通过采集自身的车辆信息获得本车的速度v1和转弯半径r,经过时间t的本车车辆的转向角度θ按照以下公式获得:
[0048][0049]
其中,r为本车的转弯半径,v1表示本车的速度;
[0050]
根据通过前视摄像头实时获得的本车和对向来车之间的纵向距离x和横向距离y以及相对速度,由相对速度结合本车的速度v1而获得对向来车的速度v2,结合本车的转向角度θ综合进行判断:
[0051]
若满足以下公式情况下,则判定本车先行转向通过,即当本车沿圆弧路径通过横向距离y时,对向来车和本车在纵向距离上还没有达到x
‑
d,产生转向控制信号控制本车转向:
[0052][0053]
其中,d表示车间安全距离,v2表示对向来车的速度;
[0054]
若满足以下公式情况下,则判定对向来车先行直行通过,即在本车和对向来车在纵向距离上达到x时,但本车沿圆弧通过的横向距离还没有到y
‑
d,产生不转向直行控制信号控制本车不转向直行:
[0055][0056]
若均不满足上述两种公式情况下,则判定是两车若以当前状态行驶将发生碰撞或者交汇过于危险,产生制动控制信号控制本车制动减速,使得本车先减速等待对向来车先行。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。