1.本发明属于雷达信号分析领域,具体地,涉及基于内插法的高精度脉冲重复间隔测量装置及方法,可用于测量雷达信号的脉冲重复间隔。
背景技术:
2.脉冲重复间隔(pri)是雷达中一个非常重要的参数,是雷达信号分选和识别,雷达测距和定位的重要依据。因此,高精度的pri测量方法对于雷达,电子战等领域具有非常重要的意义。目前测量pri的方法主要有电子计数法,延迟线内插法,时间幅度转换法,模拟内插法。其中,电子计数法的原理是通过时钟计数器对量化脉冲进行计数,在待测脉冲的上升沿输出计数值,相邻待测脉冲对应的计数值之差乘以量化时钟的周期即为测量的pri。然而,电子计数法的最大缺点是测量精度受制于量化时钟周期,最大误差可达一个量化时钟周期。虽然模拟内插法的理论测量精度很高,但实际测量精度有局限性质。延迟线内插法结构简单,但其测量精度只能到百皮秒量级。时间幅度转换法的缺点是测量范围小。
技术实现要素:
3.本发明的目的在于克服了原理误差限制测量精度的问题,保持了电子计数法测量范围大的优点,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供了一种基于内插法的高精度脉冲重复间隔测量装置,包括第一采样模块、第二采样模块、第一时钟模块、第二时钟模块和脉冲重复间隔计算模块,
5.第一时钟模块产生量化时钟信号,量化时钟的频率为f0,第二时钟模块输出由量化时钟产生的同频正弦信号,待测脉冲送入第一采样模块和第一时钟模块,待测脉冲的第一上升沿触发第一采样模块对所述第二时钟模块的输出信号进行采样,采样值为s
a
,同时,待测脉冲的第一上升沿还触发第一时钟模块输出量化时钟信号,量化时钟信号触发第二采样模块对所述第二时钟模块的输出信号进行采样,采样值为s
b
,同时开始计数,起始计数值为m;待测脉冲第二个上升沿触发量化时钟信号第一采样模块对所述第二时钟模块的输出信号进行采样,采样值为s
c
,同时,待测脉冲的第二上升沿还触发第一时钟模块输出量化时钟信号,量化时钟信号触发第二采样模块对所述第二时钟模块的输出信号进行采样,采样值为s
d
,此时终止计数值为n;
6.脉冲重复间隔计算模块根据采样值s
a
、s
b
、s
c
、s
d
,通过反三角函数计算出对应的相位值φ
a
、φ
b
、φ
c
、φ
d
,根据以下公式计算出脉冲重复间隔:
7.pri=(n
‑
m)/f0 (φ
b
–
φ
a
)/(2πf0)
‑
(φ
d
–
φ
c
)/(2πf0)。
8.进一步的,第一采样模块和第二采样模块是模数转换器。
9.进一步的,第一时钟模输出信号的频率为100mhz,第二时钟模块是原子钟,输出信号的频率为10mhz。
10.进一步的,脉冲重复间隔计算模块采用fpga实现。
11.本发明还提供了一种基于内插法的高精度脉冲重复间隔测量方法,包括步骤:
12.步骤s1:通过高速采集卡获得待测脉冲、原子钟、量化时钟的信号;
13.步骤s2:根据采集的待测脉冲信号,获取待测脉冲第一上升沿位置toa1和第二上升沿位置toa2;
14.步骤s3:根据待测脉冲的第一上升沿位置toa1和第二上升沿位置toa2,获取原子钟的四个采样点的采样值;其中,第一采样点a为待测脉冲第一上升沿位置toa1,原子钟对应的采样值为s
a
;第二采样点b为待测脉冲第一上升沿触发量化时钟并开始量化时钟计数的位置,原子钟对应的采样值为s
b
;第三采样点c测脉冲的第二上升沿位置toa2,原子钟对应的采样值为s
c
;第四采样点d待测脉冲第二上升沿触发量化时钟并终止量化脉冲计数的位置,原子钟对应的采样值为s
d
;
15.步骤s4:根据原子钟第一采样值s
a
、第二采样值s
b
、第三采样值s
c
、s
d
的值,通过反三角函数计算出对应的相位值φ
a
、φ
b
、φ
c
、φ
d
;
16.步骤s5:计算第二采样点b和第四采样点d之间的脉冲计数差值n
‑
m,其中,起始计数值m为第二采样点b的量化脉冲计数值,终止计数值n为第四采样点d的量化脉冲计数值;
17.步骤s6:根据公式pri=(n
‑
m)/f0 (φ
b
–
φ
a
)/(2πf0)
‑
(φ
d
–
φ
c
)/(2πf0)计算脉冲重复间隔pri的值,f0为量化时钟的频率。
18.进一步的,还包括步骤s7,重复步骤s1
‑
s6,对n个的待测脉冲间的间隔进行测量,n≥3,得到n
‑
1个两两待测脉冲间的脉冲重复时间间隔pri的值。
19.进一步的,还包括步骤s8,对得到n
‑
1个两两待测脉冲间的脉冲重复时间间隔pri的值进行统计平均,消除测量误差。
20.有益效果
21.1、本发明结合了内插采样技术和电子计数法,提高了雷达信号的脉冲重复间隔(pri)测量精度,测量精度达十皮秒量级,可提高雷达信号分选和识别准确度以及雷达测距和定位的精度。
22.2、本发明测量范围大,保持了电子计数法测量范围大的优点,测量范围可以通过扩展计数器的位数来提高。
23.3、本发明在提取内插相位时,采用同频正交两路信号,解决了正弦信号在90
°
和270
°
微分时过零点的问题,避免了相位提取的误差。
附图说明
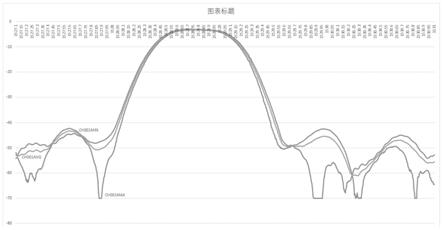
24.图1为本发明采集的三路信号的关系示意图。
25.图2为本发明基于内插法的高精度脉冲重复间隔测量装置的原理图。
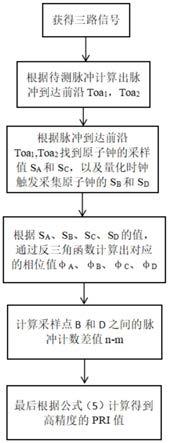
26.图3为本发明基于内插法的高精度脉冲重复间隔测量方法的流程图。
具体实施方式
27.下面结合附图对本发明的具体实施方式进行详细的说明。
28.首先通过高速采集卡获得三路数字信号,三路信号分别如图1所示:第一路是待测的脉冲信号,第二路是基准信号——原子钟,第三路是量化时钟触发原子钟采集的信号,量化时钟的频率为f0,原子钟信号是由量化时钟产生的同频正弦信号。
29.然后根据采集到的信号计算出对应的pri,其原理如下:
30.当待测脉冲上升沿到来,触发模数转换器对原子钟信号进行采样,采样值为s
a
,与此同时触发量化时钟信号,量化时钟触发模数转换器对原子钟信号进行采样,采样值为s
b
,同时开始进行脉冲计数m。下一个待测脉冲同理可得到采样值为sc和s
d
,脉冲计数n。然后根据采样值s
a
、s
b
、sc、s
d
计算出对应的相位值φ
a
、φ
b
、φc、φ
d
,最后通过公式(1)得到pri的结果:
31.pri=(n
‑
m)*t0 t1‑
t2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
32.其中m,n为脉冲计数器输出值,t0,t1,t2分别通过下式得到:
33.t0=1/f0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
34.t1=(φ
b
–
φ
a
)/(2πf0)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
35.t2=(φ
d
–
φ
c
)/(2πf0)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
36.将公式(2)(3)(4)带入到(1)中可得:
37.pri=(n
‑
m)/f0 (φ
b
–
φ
a
)/(2πf0)
‑
(φ
d
–
φ
c
)/(2πf0)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
38.对比电子计数法测量pri的结果只能达到(n
‑
m)/f0,因此最大误差为1/f0。从公式(5)中可以看出本发明提出的计算方法得到的pri值与量化时钟频率f0,脉冲计数器输出值m和n以及内插采样点的相位值有关。理论上计数器的输出值m和n不会有误差存在,因此在分析pri的测量精度时,不必考虑m和n的误差。然而,原子钟频率f0的大小和稳定度对pri的测量精度却存在影响。为了分析f0的影响,对pri进行部分全概率处理可得下式:
39.δpri=
±
1/f0 pri
·
δf0/f0
…ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
40.从公(6)式可知,f0越大,频率稳定度δf0/f0越高,对pri测量精度的影响也就越小。目前,常规的原子钟频率的稳定度已经达到了10
‑
11
量级,当待测脉冲pri的值在10ms以内时,由原子钟频率稳定度导致的测量误差仅为0.1ps,因此,原子钟频率稳定度对pri的测量影响可以克服。实际上,相位值对测量精度的影响即为adc采样的精度,下表是不同采样精度下相位和时间的提取误差值。
41.量化位数n101214理想相位/
°
909090实际计算/
°
89.967789.991289.9978相位误差/
°
0.03230.00880.0022时间误差/ps8.96342.43590.6046
42.从表中可知,当adc的量化位数在10以上时,采用正交信号的pri测量精度可达皮秒量级。综合原子钟频率稳定度和adc内插采样对pri测量精度的分析结果,本发明提出的利用内插采样的高精度pri分析方法在计算雷达信号的pri时,精度可达皮秒量级。另外,adc的数据输出信噪比和孔径抖动也会影响测量结果,下表时不同信噪比下,pri计算误差值。
43.snr/db55606570max(δpri)/ps50.9725.2715.757.95
44.从表中可知,当信噪比大于70db时,对于pri的测量误差影响在皮秒量级。此外,目前的采集元器件的孔径抖动能达到皮秒量级,可满足本发明的高测量精度需求。
45.根据上述原理,本发明具体实施例给出了一个基于内插法的高精度pri测量装置,
其原理结构如图2所示,待测脉冲上升沿触发adc1对铷钟信号进行采样,采样值为s
a
,与此同时触发本地时钟信号,是本地时钟触发adc2对铷钟信号进行采样,采样值为s
b
,同时开始计数,下一个待测脉冲同理,时钟计数器和相位之间的计算在1片fpga中完成,结果通过pci总线输出。通常铷钟信号频率为10mhz,本地时钟为100mhz,当adc数据输出精度高于65db时,测量精度能够达到几十皮秒。
46.基于本发明提出的测量原理,如图3所示,本发明具体实施方式中的基于内插法的高精度pri计算流程如下:
47.步骤s1:通过高速采集卡获得三路如图1所示的信号;
48.步骤s2:根据待测脉冲计算出脉冲到达前沿toa1,toa2;
49.步骤s3:根据脉冲到达前沿toa1,toa2找到原子钟的采样值s
a
和s
c
,以及量化时钟触发采集原子钟的s
b
和s
d
;
50.步骤s4:根据s
a
、s
b
、s
c
、s
d
的值,通过反三角函数计算出对应的相位值φ
a
、φ
b
、φ
c
、φ
d
;
51.步骤s5:计算采样点b和d之间的脉冲计数差值n
‑
m;
52.步骤s6:根据公式(5)计算pri的值。
53.进一步的,还包括步骤s7,重复步骤s1
‑
s6,对n个的待测脉冲间的间隔进行测量,n≥3,得到n
‑
1个两两待测脉冲间的脉冲重复时间间隔pri的值。
54.进一步的,还包括步骤s8,对得到n
‑
1个两两待测脉冲间的脉冲重复时间间隔pri的值进行统计平均,消除测量误差。
55.以上仅为发明的优选实施例而已,并不用以限制本发明,凡在本发明的思想原则内所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。