1.本发明涉及云台俯仰机构领域,具体涉及一种应用于红外雷达扫描的俯仰联动机构。
背景技术:
2.近年来,云台驱动技术取得了突飞猛进的发展,云台俯仰常用的驱动形式主要有两种结构形式即,直驱式、电机减速机驱动式。上述方式的俯仰机构都会对图像采集设备产生电磁干扰、造成成像不稳定、内部需要增加防干扰设置,不利于设备小型化。同时也会对检测精度产生影响。
技术实现要素:
3.本发明的一个目的是解决现有技术的驱动方式会对图像采集设备产生电磁干扰的缺陷。
4.根据本发明的第一方面,提供了一种应用于红外雷达扫描的俯仰联动机构,其特征在于,包括云台;设置在云台之上的摆镜;以及俯仰机构,所述俯仰机构用于控制所述摆镜进行俯仰运动。
5.优选地,所述俯仰机构不使用导电滑环。
6.优选地,所述俯仰机构包括回转轴、连杆滑块、回转滑环、导向连杆、t型螺杆滑块、拨叉、俯仰伺服电机;其中回转轴与摆镜连接;俯仰伺服电机通过t型螺杆滑块带动拨叉沿垂直方向上下移动,拨叉上下移动时,通过连接销带动导向连杆沿光筒两侧的滑槽上下滑动,导向连杆上安装第一回转滑环,第一回转滑环置于第二回转滑环上,当第一回转滑环向下运动时,压迫第二回转滑环向下运动,当第一回转滑环向上运动时第二回转滑环在预紧力的作用下随第一回转滑环向上运动;第二回转滑环会随着第一回转滑环的上下移动而移动,且第二回转滑环上安装连杆滑块,将第二回转滑环的上下往复运动转换为绕回转轴的圆周运动,以实现摆镜的俯仰运动。
7.优选地,所述俯仰联动机构还包括止回摆簧,所述止回摆簧的一端固定在外壳体上,另一端固定在摆镜上并附加预紧力。
8.本发明的一个技术效果是,节省云台上端空间。降低云台上端的负载重量。降低上端负载周围的用电设备,降低电磁干扰。取消导电滑环,使云台上端仅包含机械机构。并且由于云台上端结构为一体化设计,使得环境适应性一致性较好。
9.通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
附图说明
10.被结合在说明书中并构成说明书的一部分的附图示出了本发明的实施例,并且连同其说明一起用于解释本发明的原理。
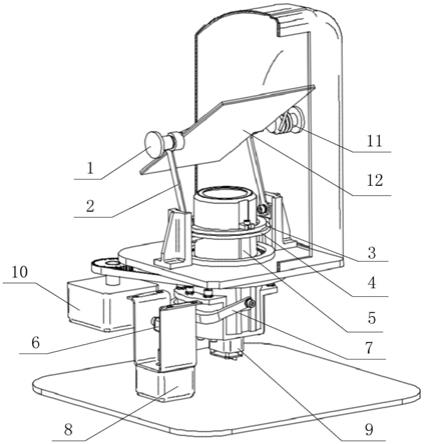
11.图1为本发明一个实施例的总体结构图;
12.图2为本发明一个实施例中云台下端的部件结构图;
13.图3为本发明一个实施例中第一回转滑环和第二回转滑环的位置关系图。
14.图4为本发明一个实施例中云台上端的部件结构图。
15.附图标记说明:
[0016]1‑
回转轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑
连杆滑块
[0017]3‑
第一回转滑环
ꢀꢀꢀꢀꢀ4‑
第二回转滑环
[0018]5‑
导向连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ6‑
t型螺杆滑块
[0019]7‑
拨叉
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ8‑
俯仰伺服电机
[0020]9‑
探测器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
‑
回转伺服电机
[0021]
11
‑
止回摆簧
ꢀꢀꢀꢀꢀꢀꢀꢀ
12
‑
摆镜
具体实施方式
[0022]
现在将参照附图来详细描述本发明的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。
[0023]
以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
[0024]
对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
[0025]
在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
[0026]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
[0027]
本发明提供一种应用于红外雷达扫描的俯仰联动机构,如图1至图4所示,包括:云台;设置在云台之上的摆镜12;以及俯仰机构,俯仰机构用于控制摆镜12进行俯仰运动。其中俯仰机构不使用导电滑环。俯仰机构包括回转轴、连杆滑块、回转滑环、导向连杆、t型螺杆滑块、拨叉、俯仰伺服电机,其中回转轴1与摆镜12连接;俯仰伺服电机8通过t型螺杆滑块6带动拨叉7沿垂直方向上下移动,拨叉7上下移动时,通过连接销带动导向连杆5沿光筒两侧的滑槽上下滑动,导向连杆5上安装第一回转滑环3,第一回转滑环3置于第二回转滑环4上,当第一回转滑环3向下运动时,压迫第二回转滑环4向下运动,当第一回转滑环3向上运动时第二回转滑环4在预紧力的作用下随第一回转滑环3向上运动;第二回转滑环4会随着第一回转滑环3的上下移动而移动,且第二回转滑环4上安装连杆滑块2,将第二回转滑环4的上下往复运动转换为绕回转轴1的圆周运动,以实现摆镜12的俯仰运动。连杆滑块2控制俯仰运动的原理与现有技术中的曲柄滑块相同。
[0028]
本发明还包括止回摆簧11,止回摆簧11的一端固定在云台的外壳体上,另一端固定在摆镜12上并附加预紧力。
[0029]
俯仰机构的特点是,其电气类驱动部件(即俯仰伺服电机和回转伺服电机)设置在云台之下,而设置在云台之上的部分均为不含电气件的机械件。能够使机构整体不使用导
电滑环的重点在于第一回转滑环3和第二回转滑环4:第二回转滑环4初始状态是附加了预紧力的,这种预紧力使第二回转滑环4具有向上运动的趋势,但因为第一回转滑环3的阻挡而未实际运动;当拨叉7向上运动时,预紧力使第二回转滑环4也随着第一回转滑环3向上运动,进而带动摆镜12在一个方向上发生俯仰运动;而当拨叉7向下运动时,第一回转滑环3将第二回转滑环4向下压,使摆镜12发生另一方向上的俯仰运动。即俯仰机构是将第二回转滑环4的上下运动转换为摆镜12的圆周运动,以此代替了现有技术中使用导电滑环的方案。
[0030]
本发明可应用于高点监控云台或红外雷达扫描等需要俯仰运动场景,可用于负载红外摄像机或可见光摄像机,替代传统的步进电机直驱或伺服减速机蜗轮蜗杆驱动的形式。本系统可带动光学负载进行俯仰运动,实现光学负载的扫描、监控、跟踪等功能。使用时云台通过回转伺服电机10进行方位转动,通过俯仰伺服电机8控制摆镜进行俯仰转动,使探测器9能够接收到大范围内的图像信息。本发明与现有技术相比,其中一个主要进步在于,摆镜驱动部分不使用导电滑环,而是通过纯机械件第二回转滑环的上下往复运动转换为摆镜的圆周运动,这样设置可以有效减少导电滑环对探测器9的电磁影响。并且本发明云台之上的部分全部为机械件,不含有电气件,为现有技术提供了一种新的设计思路。
[0031]
虽然已经通过例子对本发明的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本发明的范围。本领域的技术人员应该理解,可在不脱离本发明的范围和精神的情况下,对以上实施例进行修改。本发明的范围由所附权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。