1.本实用新型涉及电梯制动性能检测技术领域,尤其涉及一种电梯有载下行制动性能的无载荷测试系统。
背景技术:
2.电梯制动性能犹如汽车的刹车性能,其对电梯安全运行所起的作用不言而喻。现行国家标准gb 7588
‑
2003《电梯制造与安装安全规范》第12.4.2.1条规定,当轿厢载有125%额定载荷并以额定速度向下运行时,操作制动器应能使曳引机停止运转。所有参与向制动轮或盘施加制动力的制动器机械部件应分两组装设。如果一组部件不起作用,应仍有足够的制动力使载有额定载荷以额定速度下行的轿厢减速下行。电梯检验法律规程tsg t7001
‑
2009《电梯监督检验和定期检验规则——曳引与强制驱动电梯》第8.13项关于“制动试验”的检验内容和要求为:轿厢装载125%额定载重量,以正常运行速度下行时,切断电动机和制动器供电,制动器应当能够使驱动主机停止运转,试验后轿厢应无明显变形和损坏。
3.上述检规和国标规定了电梯的125%额定载荷双边制动(双边制动的含义为:曳引主机两个制动臂同时进行制动)要求和100%额定载荷单边制动(单边制动的含义为:曳引主机两个制动臂中其中一个进行制动)要求。电梯有载制动性能的传统检测方法需要搬运砝码进入轿厢再进行轿厢有载下行制动试验,该方法费时费力,测试不方便,效率低下,且搬运砝码过程中存在溜梯的安全隐患。因此,研究有载制动性能的无载荷测试方法一直是电梯行业研究的热点。目前,现有文献报道的关于电梯有载制动性能的无载荷检测与评估方法主要包括:外接驱动制动力检测法、空载上下行制动法、能量转换减速度计算法、多参数智能监测法、压力监测计算法、空载上行制动法等。上述几种方法主要存在以下问题:
4.外接驱动制动力检测法通过外接变频驱动可对制动力进行监测,反应出制动能力,但计算数学模型针对特定型号的电梯,测试通用性不足;空载上下行制动法通过两次空载试验减速度对125%载荷双边制动和100%载荷单边制动减速度是否大于零进行判断,可直接与国标gb 7588和检规tsg t7001对应,但是不能计算出具体的有载制动减速度数值,无法实现制动性能更深入地评估;能量转换减速度计算法通过空载上行制动减速度对125%载荷制动减速度计算时需要提前知道对重及轿厢的质量,实际获取难度较大;多参数智能监测法通过在线监测制动器抱闸间隙、温度、制动力等多个参数代入模型进行综合判断,该方法一定程度上反映了特定型号电梯的综合制动性能,但仍无法直接测试检规和标准中规定的125%载荷和100%载荷下行制动性能;压力监测计算法根据力平衡关系利用压力传感器对制动力进行间接计算,是否能够应用于其它多种不同形式制动器还有待进一步验证,且并未给出制动力的合理区间;空载上行制动法是目前行业应用较多的一种制动性能检测方法,形成的标准给出了不同额定速度下制停距离和制动减速度的合理范围,具有很好的参考价值,但该标准并没有很好地说明空载制动减速度、制停距离与检规、国标中有载下行制动性能的关系,与检规对应性还不够强。
5.因此,如何提供一种电梯有载下行制动性能的无载荷测试系统及方法,能够触发
空载制动、并通过对空载制动过程的平均减速度进行测量,进而对电梯有载下行制动性能进行检测,已成为本领域技术人员亟需解决的技术问题,其具有重要意义。
技术实现要素:
6.本实用新型的目的在于提供一种电梯有载下行制动性能的无载荷测试系统及方法,该系统能够对电梯空载制动过程轿厢平均减速度进行测试,并通过计算模型可对电梯是否满足125%额定载荷行程下端双边下行制动性能和100%额定载荷行程下端单边下行制动性能进行判断;该方法能够根据空载制动试验测得的平均制动减速度对有载制动平均减速度进行快速便捷计算。
7.为达到上述目的,本实用新型采用如下技术方案:
8.一种电梯有载下行制动性能的无载荷测试系统,包括:制动减速度测量模块,所述制动减速度测量模块用于测量电梯制动过程中该电梯轿厢的平均制动减速度;
9.制动瞬间检测模块,所述制动瞬间检测模块装配于制动执行机构,用于在制动执行机构对制动轮制动的瞬间进行检测,以获取制动执行瞬间的时刻;
10.制动触发模块,所述制动触发模块用于控制制动器线圈失电,以触发制动执行机构对旋转的制动轮进行制动,并使与制动轮同轴的曳引轮停止转动,实现电梯轿厢的制停;
11.主控制器,所述主控制器分别与所述制动减速度测量模块、所述制动瞬间检测模块及所述制动触发模块连接,用于控制所述制动触发模块触发电梯制动执行机构动作,并获取所述制动减速度测量模块测得的电梯轿厢减速度数据,以及所述制动瞬间检测模块检测的制动执行机构的动作瞬间信号。
12.实际应用时,所述电梯有载下行制动性能的无载荷测试系统还包括:人机交互模块,所述人机交互模块与所述主控制器连接,用于对所述主控制器进行控制,以获取测试系统信息,实现人机交互。
13.其中,所述人机交互模块通过显示屏、鼠标、键盘、按键或触摸屏中的任一种或多种方式对所述主控制器进行控制。
14.具体地,所述主控制器选用plc、个人计算机、工控机或单片机中的任一种,且所述主控制器与所述制动减速度测量模块、所述制动瞬间检测模块及所述制动触发模块之间采用有线或无线的方式进行通讯连接。
15.进一步地,无线通讯方式采用wifi或蓝牙,且所述主控制器与所述制动减速度测量模块、所述制动瞬间检测模块及所述制动触发模块之间分别设置有信号中转模块。
16.更进一步地,所述制动减速度测量模块采用旋转编码器模块,所述旋转编码器模块通过测速滚轮与电梯曳引钢丝绳接触,且所述测速滚轮与所述旋转编码器模块同轴固定连接。
17.可替代地,所述制动减速度测量模块采用加速度传感器,且所述加速度传感器置于电梯轿厢的内部。
18.再进一步地,所述制动触发模块能够使控制柜中动力回路主继电器触点断开,并触发电梯控制系统对外输出制动命令,以使制动器的制动线圈失电,实现对制动轮进行制动。
19.相对于现有技术,本实用新型所述的电梯有载下行制动性能的无载荷测试系统具
有以下优势:
20.本实用新型提供的电梯有载下行制动性能的无载荷测试系统中,由于制动减速度测量模块能够用于测量电梯制动过程中轿厢的平均制动减速度,制动瞬间检测模块能够用于在制动执行机构对制动轮制动的瞬间进行检测、以获取制动执行瞬间的时刻,制动触发模块能够用于控制制动器线圈失电、以触发制动执行机构对旋转的制动轮进行制动、并使与制动轮同轴的曳引轮停止转动、实现电梯轿厢的制停,主控制器能够用于控制制动触发模块触发电梯制动执行机构动作、并获取制动减速度测量模块测得的电梯轿厢减速度数据及制动瞬间检测模块检测的制动执行机构的动作瞬间信号,因此通过制动瞬间检测模块能够准确识别制动器制动瞬间的时刻、有利于提高平均制动减速度计算的准确性,通过制动触发模块能够使轿厢在指定位置自动触发制动过程,减少人为断电时对轿厢位置判断不准确的问题,并且测试时无需搬运砝码、能够实现通过三次空载制动试验对有载制动性能的快速评估,从而有效减少人力物力、提高测试效率和测试过程安全性。
21.一种电梯有载下行制动性能的无载荷测试方法,包括以下步骤:
22.步骤s1、建立电梯轿厢在125%额定载荷行程下部下行双边制动情况下减速度a125、以及在100%额定载荷行程下部下行单边制动情况下减速度a100的计算模型;
23.步骤s2、根据计算模型的判断条件,进行电梯有载下行制动性能无载荷测试;
24.其中,所述步骤s1具体包括以下步骤:
25.步骤s11、根据偏载力矩、转动惯量建立电梯制动过程动力学模型;
26.步骤s12、根据动力学模型对不同制动工况进行动力学分析;
27.步骤s13、计算125%额定载荷行程下端下行双边制动减速度为
28.步骤s14、计算100%额定载荷行程下端下行单边制动减速度为
29.所述步骤s2具体包括以下步骤:
30.步骤s21、查阅资料,或进行平衡系数测试,得到被测电梯的平衡系数k;
31.步骤s22、操作电梯以正常运行速度从底层开始空载上行,当轿厢运行至行程中部时切断电梯电源,进而触发双边制动器执行制动操作,通过加速度测试仪器测量从制动器开始动作到电梯完全停止过程中轿厢的平均制动减速度a1;
32.步骤s23、操作电梯以正常运行速度从顶层开始空载下行,当轿厢运行至行程中部时切断电梯电源,进而触发双边制动器执行制动操作,通过加速度测试仪器测量从制动器开始动作到电梯完全停止过程中轿厢的平均制动减速度a2;
33.步骤s24、操作电梯以正常运行速度从顶层开始空载下行,当轿厢运行至行程下部时切断电梯电源,进而触发双边制动器执行制动操作,通过加速度测试仪器测量从制动器开始动作到电梯完全停止过程中轿厢的平均制动减速度a0;
34.步骤s25、对数据进行处理,并根据获得的平衡系数和上述三个步骤测得的三个制动减速度,判断是否满足和若符合说明电梯满足
125%额定载荷下行双边制动要求,否则不满足;若符合说明电梯满足100%额定载荷下行单边制动要求,否则不满足。
35.进一步地,所述步骤s11具体包括:根据力矩平衡关系,忽略导轨摩擦力对系统的影响,可得曳引电梯在不同位置、不同运行方向、不同装载质量下制动的动力学模型:影响,可得曳引电梯在不同位置、不同运行方向、不同装载质量下制动的动力学模型:
36.进一步地,所述步骤s12具体包括:对三种电梯轿厢空载工况和两种有载工况进行制动过程动力学分析,三种空载工况分别为空载行程中部上行双边制动、空载行程中部下行双边制动、空载行程下端下行双边制动,两种有载工况分别为125%额定载荷行程下部下行双边制动工况和100%额定载荷行程下部下行单边制动工况;五种制动工况下c和x取值如下表1所示:
[0037][0038][0039]
假设制动器双边制动力矩为m,且单边制动力矩为双边制动力矩的一半,得出五种工况制动工况下制动力矩、偏载力矩、轿厢装载量对应转动惯量如下表2所示:
[0040][0041][0042]
进一步地,所述步骤s13具体包括:实际传动效率近似于100%,为简化计算过程,假设传动效率为100%,即η=1;整理得到125%额定载荷行程下端下行双边制动的制动减速度表达式:
[0043][0044]
更进一步地,所述步骤s11具体包括:电梯制动过程中由于曳引轮两侧重量差将对制动轮轴心产生偏载力矩,假设偏载力矩正方向为轿厢减速运动方向,即制动时制动力矩的反方向,则偏载力矩可表示为:式中:
[0045]
m
p
——偏载力矩,单位n
·
m;
[0046]
x——装载系数,即轿厢装载量占额定载荷的比例;
[0047]
m
s1
——曳引轮轿厢侧钢丝绳质量,单位kg;
[0048]
m
b1
——曳引轮轿厢侧补偿绳(链)质量,单位kg;
[0049]
m
s2
——曳引轮对重侧钢丝绳质量,单位kg;
[0050]
m
b2
——曳引轮对重侧补偿绳(链)的质量,单位kg;
[0051]
w——对重质量,单位kg;
[0052]
p——轿厢质量,单位kg;
[0053]
q——额定载荷,单位kg;
[0054]
d——曳引轮节圆直径,单位m;
[0055]
i——曳引比,即电梯运行时钢丝绳移动速度与轿厢移动速度的比值;
[0056]
r——制动轮到曳引轮的传动比,即制动轮转速与曳引轮转速的比值,对于同步电机等于1;
[0057]
g——重力加速度系数,取值9.8m
·
s
‑2;
[0058]
若电梯轿厢总提升高度为h,补偿绳(链)总质量为m
b
,则有:m
s1
=(1
‑
c)m
s
——(2),式中:
[0059]
m
s
——钢丝绳总质量,单位kg;
[0060]
c——轿厢位置系数,无量纲,取值范围为0到1,0表示轿厢位于底层端站,1表示轿厢位于顶层端站;
[0061]
曳引轮对重侧钢丝绳质量为:m
s2
=cm
s
——(3),曳引轮轿厢侧补偿绳(链)质量为:m
b1
=cm
b
——(4),式中:
[0062]
m
b
——补偿绳(链)总质量,单位kg;
[0063]
曳引轮对重侧补偿绳(链)的质量为:m
b2
=(1
‑
c)m
b
——(5),将式(2)、式(3)、式(4)和式(5)代入式(1)可得:偏载力矩与电梯轿厢装载质量和电梯轿厢所处位置有关,若钢丝绳和补偿绳(链)达到理想补偿状态,则偏载力矩只与轿厢所处位置有关;
[0064]
电梯制动过程中运动系统转动惯量可由两部分组成:j=j
z
j0——(7),式中:
[0065]
j——系统总转动惯量,单位kg
·
m2;
[0066]
j0——曳引轮、制动轮等旋转部件的转动惯量,单位kg
·
m2;
[0067]
j
z
——除曳引轮、制动轮等旋转部件以外其余直线运动部件的转动惯量,即包括轿厢、对重、轿厢中载荷、钢丝绳、补偿绳(链)的总转动惯量,单位kg
·
m2;
[0068]
由刚体动力学可得,直线运动物体转动惯量与质量间存在如下关系:式中:
[0069]
ω——制动轮转动角速度,单位s
‑1;
[0070]
v——轿厢运行速度,单位m
·
s
‑1;
[0071]
m——轿厢、对重和载荷的总质量,单位kg;
[0072]
m可表示为:m=p w xq——(9),制动轮转动角速度与轿厢线速度关系为:将式(9)和式(10)代入式(8)可得:
[0073]
gb 7588附录g2.4对平衡系数的定义为“额定载重量及轿厢质量由对重或平衡重
平衡的量”,根据该定义,p、w和q之间关系为:
[0074]
w=p kq——(12),式中:
[0075]
k——平衡系数,无量纲;
[0076]
式(12)代入式(11),经整理可得j
z
由两部分组成:j
z
=j
z1
j
z2
——(13),式中:
[0077]
j
z1
——系统固有直线运动部件的转动惯量,即轿厢、对重、钢丝绳、补偿绳(链)的总转动惯量,单位kg
·
m2;
[0078]
j
z2
——装载系数为x时轿厢中载荷的转动惯量,单位kg
·
m2;
[0079]
j
z1
可表示为:j
z2
可表示为:对于确定的电梯系统,轿厢质量、对重质量、平衡系数、曳引比、钢丝绳质量、补偿绳(链)质量、曳引轮直径、传动比可认为是定值,因此j
z1
为常数,j
z2
与轿厢中所承载的物体重量有关;
[0080]
根据力矩平衡关系,忽略导轨摩擦力对系统的影响,则制动过程中制动力矩为偏载力矩m
p
与惯性力矩ηjε的和,可得:m
z
‑
m
p
=ηjε——(16),式中:
[0081]
m
z
——制动力矩,其方向为轿厢运动的反方向,单位n
·
m;
[0082]
ε——制动轮角减速度,单位rad
·
s
‑
2;
[0083]
η——制动轮到曳引轮的传动效率,无量纲;
[0084]
制动轮角减速度与轿厢减速度关系为:式中:
[0085]
a——轿厢制动减速度,m
·
s
‑2;
[0086]
将式(7)、式(13)和式(17)代入式(16),可得曳引电梯在不同位置、不同运行方向、不同装载质量下制动的动力学模型:
[0087][0088]
更进一步地,所述步骤s12具体包括:对三种电梯轿厢空载工况和两种有载工况进行制动过程动力学分析,三种空载工况分别为空载行程中部上行双边制动、空载行程中部下行双边制动、空载行程下端下行双边制动,两种有载工况分别为125%额定载荷行程下部下行双边制动工况和100%额定载荷行程下部下行单边制动工况;五种制动工况下c和x取值如下表1所示:
[0089]
[0090][0091]
空载行程中部上行双边制动或空载行程中部下行双边制动时曳引轮两侧钢丝绳质量和补偿绳(链)质量相等,偏载力矩的正方向与制动力矩方向相反,将表1中参数代入式(6)得两工况下偏载力矩,分别如式(19)和式(20)所示:(6)得两工况下偏载力矩,分别如式(19)和式(20)所示:
[0092]
空载行程下端下行双边制动,可认为钢丝绳全部位于轿厢侧,补偿绳(链)全部位于对重侧,将表(1)中参数代入式(6)可得该工况下偏载力矩:
[0093]
在标准gb7588
‑
2003中关于125%额定载荷双边制动工况下,轿厢位于行程下端,可认为钢丝绳全部位于轿厢侧,补偿绳(链)全部位于对重侧,偏载力矩为:可认为钢丝绳全部位于轿厢侧,补偿绳(链)全部位于对重侧,偏载力矩为:由式(15)可知,该工况下载荷对应的转动惯量为:
[0094]
在标准gb7588
‑
2003中关于100%载荷单边制动工况下,轿厢位于行程下端,可认为钢丝绳全部位于轿厢侧,补偿绳(链)全部位于对重侧,偏载力矩为:由式(15)可知,该工况下载荷对应的转动惯量为:的转动惯量为:
[0095]
假设制动器双边制动力矩为m,且单边制动力矩为双边制动力矩的一半,结合式(11)平衡系数定义对式(19)、式(20)、式(21)、式(22)和式(24)进行化简,得出五种工况制动工况下制动力矩、偏载力矩、轿厢装载量对应转动惯量如下表2所示:
[0096][0097][0098]
更进一步地,所述步骤s13具体包括:实际传动效率近似于100%,为简化计算过程,假设传动效率为100%,即η=1;根据式(18)和表2中参数取值建立三种空载制动工况和125%额定载荷制动工况的动力学方程组:
[0099]
上述方程组中:
[0100]
a1——空载行程中部上行双边制动的制动减速度,单位m
·
s
‑2;
[0101]
a2——空载行程中部下行双边制动的制动减速度,单位m
·
s
‑2;
[0102]
a0——空载行程下部下行双边制动的制动减速度,单位m
·
s
‑2;
[0103]
a
125
——125%额定载荷行程下端下行双边制动的制动减速度,单位m
·
s
‑2;
[0104]
a、b和c为用于简化计算过程的自定义常数,分别为:
[0105]
x与125%额定载荷产生的转动惯量有关:
[0106]
将式(26)/式(27),并带入式(33)可得:将式(26)/式(27),并带入式(33)可得:
[0107]
将式(26)、式(27)相加,并带入式(34)可得:将式(26)、式(27)相加,并带入式(34)可得:
[0108]
将式(28)、式(29)相减可得:1.25a=ba0‑
(b x)a
125
——(36);将式(30)、式(33)和式(35)带入式(36),整理得到125%额定载荷行程下端下行双边制动的制动减速度表达式:
[0109][0110]
更进一步地,所述步骤s14具体包括:根据式(8)和表2中参数建立三种空载制动工况和100%额定载荷制动工况的动力学方程组:
[0111]
上述方程组中:
[0112]
a1——空载行程中部上行双边制动的制动减速度,单位m
·
s
‑2;
[0113]
a2——空载行程中部下行双边制动的制动减速度,单位m
·
s
‑2;
[0114]
a0——空载行程下部下行双边制动的制动减速度,单位m
·
s
‑2;
[0115]
a
100
——100%额定载荷行程下端下行单边制动的制动减速度,单位m
·
s
‑2;
[0116]
a、b和c为用于简化计算过程的自定义常数,分别为:a、b和c为用于简化计算过程的自定义常数,分别为:
[0117]
式(38)中x
′
与100%额定载荷产生的转动惯量有关:与100%额定载荷产生的转动惯量有关:参考上文125%额定载荷制动减速度计算方法,得到100%额定载荷行程下端下行单边制动的制动减速度表达式:
[0118][0119]
再进一步地,所述步骤s2中,要满足gb7588和tsg t7001中有载制动性能要求,制动减速度应大于零,以满足减速要求,因此有:
[0120][0121]
将式(37)和式(40)分别代入上述不等式组,整理可得平衡系数与三个空载制动减
速度关系:
[0122][0123]
若平衡系数k、三个空载制动减速度a1、a2、a0同时满足式(43)和式(44),说明该电梯可满足125%额定载荷行程下部下行双边制动和100%额定载荷行程下部下行单边制动的减速要求,该检验项目为合格;式(43)和式(44)即为电梯是否满足125%额定载荷行程下部下行双边制动性能和100%额定载荷行程下部下行单边制动性能的判断依据。
[0124]
所述电梯有载下行制动性能的无载荷测试方法与上述电梯有载下行制动性能的无载荷测试系统,相对于现有技术所具有的优势相同,在此不再赘述。
[0125]
此外,本实用新型所述的电梯有载下行制动性能的无载荷测试方法具有以下几点优势:
[0126]
一、通过计算模型,能够实现有载下行制动平均减速度的定量计算,判断其是否大于零,以对电梯制动器制动可靠性进行快速判断;
[0127]
二、对电梯有载制动性能检测时仅需测试三种空载制动工况下的平均减速度即可,通过计算的方法实现有载制动减速度的无载荷测试,降低劳动强度、节约测试时间和测试成本;
[0128]
三、有效避免搬运砝码进行制动测试时对电梯造成的损害,且由于不需要搬运砝码频繁进出电梯轿厢,从而有效保护了测试人员的安全。
附图说明
[0129]
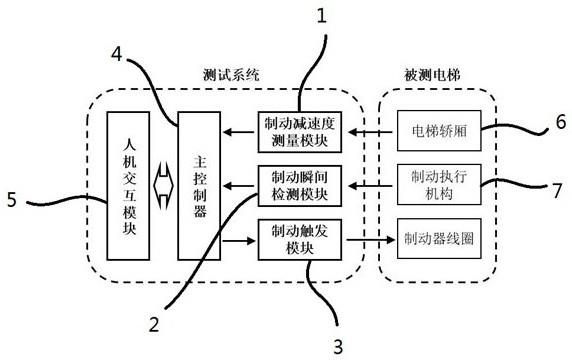
图1为本实用新型实施例提供的电梯有载下行制动性能的无载荷测试系统的模块结构示意图;
[0130]
图2为本实用新型实施例提供的电梯有载下行制动性能的无载荷测试系统的一种安装结构示意图;
[0131]
图3为本实用新型实施例提供的电梯有载下行制动性能的无载荷测试系统的另一种安装结构示意图;
[0132]
图4为本实用新型实施例提供的电梯有载下行制动性能的无载荷测试系统中测试时制动瞬间检测模块和制动减速度测试模块的输出信号示意图;
[0133]
图5为曳引电梯的典型结构示意图;
[0134]
图6为电梯轿厢空载双边行程中部上行制动的工况示意图;
[0135]
图7为电梯轿厢空载双边行程中部下行制动的工况示意图;
[0136]
图8为电梯轿厢空载双边行程下部下行制动的工况示意图;
[0137]
图9为电梯轿厢在125%额定载荷行程下端下行双边制动的工况示意图;
[0138]
图10为电梯轿厢在100%额定载荷行程下端下行单边制动的工况示意图。
[0139]
附图标记:
[0140]1‑
制动减速度测量模块;11
‑
旋转编码器模块;10
‑
测速滚轮;12
‑
加速度传感器;2
‑
制动瞬间检测模块;3
‑
制动触发模块;4
‑
主控制器;41
‑
笔记本电脑;42
‑
单片机;5
‑
人机交互
模块;6
‑
电梯轿厢;7
‑
制动执行机构;71
‑
制动轮;72
‑
制动器;8
‑
信号中转模块;9
‑
钢丝绳;01
‑
电梯机房;02
‑
控制柜。
具体实施方式
[0141]
为了便于理解,下面结合说明书附图,对本实用新型实施例提供的电梯有载下行制动性能的无载荷测试系统及方法进行详细描述。
[0142]
本实用新型实施例提供的电梯有载下行制动性能的无载荷测试系统及方法,能够用于对电梯多种空载制动工况下平均减速度进行测试,同时能够根据计算模型计算出电梯125%额定载荷行程下部下行双边制动减速度a125和100%额定载荷行程下部下行单边制动减速度a100,并根据a125和a100是否大于零对电梯制动性能进行评估。
[0143]
本实用新型实施例提供一种电梯有载下行制动性能的无载荷测试系统,如图1
‑
图4所示,包括:制动减速度测量模块1,制动减速度测量模块1用于测量电梯制动过程中该电梯轿厢6的平均制动减速度;
[0144]
制动瞬间检测模块2,制动瞬间检测模块2装配于制动执行机构7,用于在制动执行机构7对制动轮71制动的瞬间进行检测,以获取制动执行瞬间的时刻;
[0145]
制动触发模块3,制动触发模块3用于控制制动器线圈失电,以触发制动执行机构7对旋转的制动轮71进行制动,并使与制动轮71同轴的曳引轮停止转动,实现电梯轿厢6的制停;
[0146]
主控制器4,主控制器4分别与制动减速度测量模块1、制动瞬间检测模块2及制动触发模块3连接,用于控制制动触发模块3触发电梯制动执行机构7动作,并获取制动减速度测量模块1测得的电梯轿厢6减速度数据,以及制动瞬间检测模块2检测的制动执行机构7的动作瞬间信号,以。
[0147]
相对于现有技术,本实用新型实施例所述的电梯有载下行制动性能的无载荷测试系统具有以下优势:
[0148]
本实用新型实施例提供的电梯有载下行制动性能的无载荷测试系统中,由于制动减速度测量模块1能够用于测量电梯制动过程中轿厢6的平均制动减速度,制动瞬间检测模块2能够用于在制动执行机构7对制动轮71制动的瞬间进行检测、以获取制动执行瞬间的时刻,制动触发模块3能够用于控制制动器线圈失电、以触发制动执行机构7对旋转的制动轮71进行制动、并使与制动轮71同轴的曳引轮停止转动、实现电梯轿厢6的制停,主控制器4能够用于控制制动触发模块3触发电梯制动执行机构7动作、并获取制动减速度测量模块1测得的电梯轿厢6减速度数据及制动瞬间检测模块2检测的制动执行机构7的动作瞬间信号,因此通过制动瞬间检测模块2能够准确识别制动器制动瞬间的时刻、有利于提高平均制动减速度计算的准确性,通过制动触发模块3能够使轿厢6在指定位置自动触发制动过程,减少人为断电时对轿厢位置判断不准确的问题,并且测试时无需搬运砝码、能够实现通过三次空载制动试验对有载制动性能的快速评估,从而有效减少人力物力、提高测试效率和测试过程安全性。
[0149]
实际应用时,如图1所示,本实用新型实施例提供的电梯有载下行制动性能的无载荷测试系统还可以包括:人机交互模块5,该人机交互模块5与主控制器4连接,能够用于对主控制器4进行控制,以获取测试系统信息,实现人机交互。
[0150]
其中,上述人机交互模块5可以通过显示屏、鼠标、键盘、按键或触摸屏中的任一种或多种方式对主控制器4进行控制。
[0151]
具体地,上述主控制器4可以选用plc、个人计算机、工控机或单片机中的任一种,且该主控制器4与制动减速度测量模块1、制动瞬间检测模块2及制动触发模块3之间可以采用有线或无线的方式进行通讯连接。
[0152]
进一步地,上述无线通讯方式可以采用wifi、蓝牙或2.4g等,且主控制器4与制动减速度测量模块1、制动瞬间检测模块2及制动触发模块3之间可以分别设置有信号中转模块8,从而通过该信号中转模块8有效确保信号准确传输。
[0153]
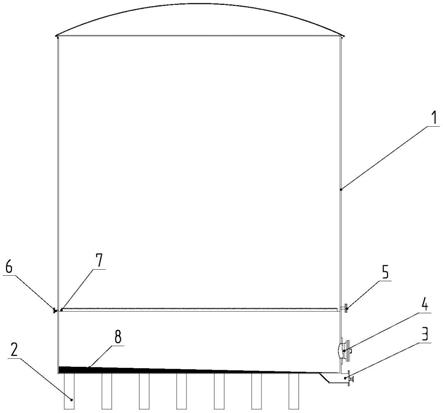
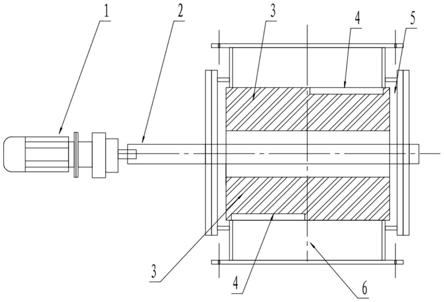
更进一步地,如图2所示,上述制动减速度测量模块1可以采用旋转编码器模块11,该旋转编码器模块11通过测速滚轮10与电梯曳引钢丝绳9接触,且测速滚轮10与旋转编码器模块11为同轴固定连接。
[0154]
可替代地,如图3所示,上述制动减速度测量模块1可以采用加速度传感器12,且该加速度传感器12置于电梯轿厢6的内部。
[0155]
再进一步地,如图2和图3所示,上述制动触发模块3能够使控制柜02中动力回路主继电器触点断开,并触发电梯控制系统对外输出制动命令,以使制动器72的制动线圈失电(也即使制动器72的内部铁芯失磁),从而实现对制动轮71进行制动。
[0156]
如图4所示,本实用新型实施例提供的电梯有载下行制动性能的无载荷测试系统中,轿厢平均制动减速度测量原理为:
[0157]
电梯制动过程中,电梯轿厢6的速度由v0变为零,t1为制动器72的动作瞬间,t2为电梯轿厢6速度降到零的瞬间,则该过程的平均制动减速度为v0/(t2
‑
t1),因此要准确计算平均制动减速度,需准确获得电梯的制动器72对制动轮71实行制动瞬间的时刻t1,在本系统中该时刻由主控制器4根据制动瞬间检测模块2输出的连续信号进行分析获得。
[0158]
假设制动瞬间检测模块2监测的电信号类型为制动状态确认开关向电梯主控板输出的电势信号u,且制动器72不动作时该电势信号为0,制动器72制动后该电势信号变为u0,则制动瞬间的时刻t1为信号u的上升沿开始时刻。
[0159]
测试系统分别测得电梯空载上行行程中部双边制动平均减速度a1、空载下行行程中部双边制动平均减速度a2和空载下行行程下部双边制动平均减速度a0、电梯平衡系数k四个变量,建立电梯制动过程动力学计算模型,并对电梯在125%额定载荷行程下部下行双边制动减速度a125、电梯在100%额定载荷行程下部下行单边制动减速度a100进行计算,以实现通过空载制动减速度对有载制动减速度计算,进而根据a125和a100的数值正负对有载下行制动性能进行评估。若这三个平均减速度和平衡系数k之间关系满足则说明该电梯满足125%额定载荷双边制动性能要求,若此三个减速度与平衡系数k之间满足则说明此电梯满足100%额定载荷单边制动性能要求。
[0160]
本实用新型实施例再提供一种电梯有载下行制动性能的无载荷测试方法,包括以下步骤:步骤s1、建立电梯轿厢在125%额定载荷行程下部下行双边制动情况下减速度a125、以及在100%额定载荷行程下部下行单边制动情况下减速度a100的计算模型;步骤s2、根据计算模型的判断条件,进行电梯有载下行制动性能无载荷测试;
[0161]
其中,所述步骤s1具体包括以下步骤:步骤s11、根据偏载力矩、转动惯量建立电梯制动过程动力学模型;步骤s12、根据动力学模型对不同制动工况进行动力学分析;步骤s13、计算125%额定载荷行程下端下行双边制动减速度为步骤s14、计算100%额定载荷行程下端下行单边制动减速度为
[0162]
所述步骤s2具体包括以下步骤:步骤s21、查阅资料,或进行平衡系数测试,得到被测电梯的平衡系数k;步骤s22、操作电梯以正常运行速度从底层开始空载上行,当轿厢运行至行程中部时切断电梯电源,进而触发双边制动器执行制动操作,通过加速度测试仪器测量从制动器开始动作到电梯完全停止过程中轿厢的平均制动减速度a1;步骤s23、操作电梯以正常运行速度从顶层开始空载下行,当轿厢运行至行程中部时切断电梯电源,进而触发双边制动器执行制动操作,通过加速度测试仪器测量从制动器开始动作到电梯完全停止过程中轿厢的平均制动减速度a2;步骤s24、操作电梯以正常运行速度从顶层开始空载下行,当轿厢运行至行程下部时切断电梯电源,进而触发双边制动器执行制动操作,通过加速度测试仪器测量从制动器开始动作到电梯完全停止过程中轿厢的平均制动减速度a0;步骤s25、对数据进行处理,并根据获得的平衡系数和上述三个步骤测得的三个制动减速度,判断是否满足和若符合说明电梯满足125%额定载荷下行双边制动要求,否则不满足;若符合说明电梯满足100%额定载荷下行单边制动要求,否则不满足。
[0163]
具体实施例一:
[0164]
一种电梯有载下行制动性能的无载荷测试方法,包括:
[0165]
步骤s1、建立电梯轿厢在125%额定载荷行程下部下行双边制动情况下减速度a125、以及在100%额定载荷行程下部下行单边制动情况下减速度a100的计算模型,具体包括:
[0166]
步骤s11、根据偏载力矩、转动惯量建立电梯制动过程动力学模型:
[0167]
如图5所示,电梯制动过程中由于曳引轮两侧重量差将对制动轮轴心产生偏载力矩,假设偏载力矩正方向为轿厢减速运动方向,即制动时制动力矩的反方向,则偏载力矩可表示为:
[0168]
式中:
[0169]
m
p
——偏载力矩,单位n
·
m;
[0170]
x——装载系数,即轿厢装载量占额定载荷的比例;
[0171]
m
s1
——曳引轮轿厢侧钢丝绳质量,单位kg;
[0172]
m
b1
——曳引轮轿厢侧补偿绳(链)质量,单位kg;
[0173]
m
s2
——曳引轮对重侧钢丝绳质量,单位kg;
[0174]
m
b2
——曳引轮对重侧补偿绳(链)的质量,单位kg;
[0175]
w——对重质量,单位kg;
[0176]
p——轿厢质量,单位kg;
[0177]
q——额定载荷,单位kg;
[0178]
d——曳引轮节圆直径,单位m;
[0179]
i——曳引比,即电梯运行时钢丝绳移动速度与轿厢移动速度的比值;
[0180]
r——制动轮到曳引轮的传动比,即制动轮转速与曳引轮转速的比值,对于同步电机等于1;
[0181]
g——重力加速度系数,取值9.8m
·
s
‑2;
[0182]
若电梯轿厢总提升高度为h,补偿绳(链)总质量为m
b
,则有:m
s1
=(1
‑
c)m
s
——(2),式中:
[0183]
m
s
——钢丝绳总质量,单位kg;
[0184]
c——轿厢位置系数,无量纲,取值范围为0到1,0表示轿厢位于底层端站,1表示轿厢位于顶层端站;
[0185]
曳引轮对重侧钢丝绳质量为:m
s2
=cm
s
——(3),曳引轮轿厢侧补偿绳(链)质量为:m
b1
=cm
b
——(4),式中:
[0186]
m
b
——补偿绳(链)总质量,单位kg;
[0187]
曳引轮对重侧补偿绳(链)的质量为:m
b2
=(1
‑
c)m
b
——(5),将式(2)、式(3)、式(4)和式(5)代入式(1)可得:偏载力矩与电梯轿厢装载质量和电梯轿厢所处位置有关,若钢丝绳和补偿绳(链)达到理想补偿状态,则偏载力矩只与轿厢所处位置有关;
[0188]
电梯制动过程中运动系统转动惯量可由两部分组成:j=j
z
j0——(7),式中:
[0189]
j——系统总转动惯量,单位kg
·
m2;
[0190]
j0——曳引轮、制动轮等旋转部件的转动惯量,单位kg
·
m2;
[0191]
j
z
——除曳引轮、制动轮等旋转部件以外其余直线运动部件的转动惯量,即包括轿厢、对重、轿厢中载荷、钢丝绳、补偿绳(链)的总转动惯量,单位kg
·
m2;
[0192]
由刚体动力学可得,直线运动物体转动惯量与质量间存在如下关系:式中:
[0193]
ω——制动轮转动角速度,单位s
‑1;
[0194]
v——轿厢运行速度,单位m
·
s
‑1;
[0195]
m——轿厢、对重和载荷的总质量,单位kg;
[0196]
m可表示为:m=p w xq——(9),制动轮转动角速度与轿厢线速度关系为:将式(9)和式(10)代入式(8)可得:
[0197]
gb 7588附录g2.4对平衡系数的定义为“额定载重量及轿厢质量由对重或平衡重平衡的量”,根据该定义,p、w和q之间关系为:
[0198]
w=p kq——(12),式中:
[0199]
k——平衡系数,无量纲;
[0200]
式(12)代入式(11),经整理可得j
z
由两部分组成:j
z
=j
z1
j
z2
——(13),式中:
[0201]
j
z1
——系统固有直线运动部件的转动惯量,即轿厢、对重、钢丝绳、补偿绳(链)的总转动惯量,单位kg
·
m2;
[0202]
j
z2
——装载系数为x时轿厢中载荷的转动惯量,单位kg
·
m2;
[0203]
j
z1
可表示为:j
z2
可表示为:对于确定的电梯系统,轿厢质量、对重质量、平衡系数、曳引比、钢丝绳质量、补偿绳(链)质量、曳引轮直径、传动比可认为是定值,因此j
z1
为常数,j
z2
与轿厢中所承载的物体重量有关;
[0204]
根据力矩平衡关系,忽略导轨摩擦力对系统的影响,则制动过程中制动力矩为偏载力矩m
p
与惯性力矩ηjε的和,可得:m
z
‑
m
p
=ηjε——(16),式中:
[0205]
m
z
——制动力矩,其方向为轿厢运动的反方向,单位n
·
m;
[0206]
ε——制动轮角减速度,单位rad
·
s
‑
2;
[0207]
η——制动轮到曳引轮的传动效率,无量纲;
[0208]
制动轮角减速度与轿厢减速度关系为:式中:
[0209]
a——轿厢制动减速度,m
·
s
‑2;
[0210]
将式(7)、式(13)和式(17)代入式(16),可得曳引电梯在不同位置、不同运行方向、不同装载质量下制动的动力学模型:
[0211]
步骤s12、根据动力学模型对不同制动工况进行动力学分析:
[0212]
对三种电梯轿厢空载工况和两种有载工况进行制动过程动力学分析,三种空载工况分别为空载行程中部上行双边制动、空载行程中部下行双边制动、空载行程下端下行双边制动,两种有载工况分别为125%额定载荷行程下部下行双边制动工况和100%额定载荷行程下部下行单边制动工况;五种制动工况下c和x取值如下表1所示:
[0213][0213][0214]
如图6和图7所示,空载行程中部上行双边制动或空载行程中部下行双边制动时曳引轮两侧钢丝绳质量和补偿绳(链)质量相等,偏载力矩的正方向与制动力矩方向相反,将表1中参数代入式(6)得两工况下偏载力矩,分别如式(19)和式(20)所示:表1中参数代入式(6)得两工况下偏载力矩,分别如式(19)和式(20)所示:
[0215][0216]
如图8所示,空载行程下端下行双边制动,可认为钢丝绳全部位于轿厢侧,补偿绳(链)全部位于对重侧,将表(1)中参数代入式(6)可得该工况下偏载力矩:(链)全部位于对重侧,将表(1)中参数代入式(6)可得该工况下偏载力矩:
[0217]
如图9所示,在标准gb7588
‑
2003中关于125%额定载荷双边制动工况下,轿厢位于行程下端,可认为钢丝绳全部位于轿厢侧,补偿绳(链)全部位于对重侧,偏载力矩为:由式(15)可知,该工况下载荷对应的转动惯量为:
[0218]
如图10所示,在标准gb7588
‑
2003中关于100%载荷单边制动工况下,轿厢位于行程下端,可认为钢丝绳全部位于轿厢侧,补偿绳(链)全部位于对重侧,偏载力矩为:由式(15)可知,该工况下载荷对应的转动惯量为:
[0219]
假设制动器双边制动力矩为m,且单边制动力矩为双边制动力矩的一半,结合式(11)平衡系数定义对式(19)、式(20)、式(21)、式(22)和式(24)进行化简,得出五种工况制动工况下制动力矩、偏载力矩、轿厢装载量对应转动惯量如下表2所示:
[0220][0221]
步骤s13、计算125%额定载荷行程下端下行双边制动减速度:
[0222]
实际传动效率近似于100%,为简化计算过程,假设传动效率为100%,即η=1;根据式(18)和表2中参数取值建立三种空载制动工况和125%额定载荷制动工况的动力学方程组:
[0223]
上述方程组中:
[0224]
a1——空载行程中部上行双边制动的制动减速度,单位m
·
s
‑2;
[0225]
a2——空载行程中部下行双边制动的制动减速度,单位m
·
s
‑2;
[0226]
a0——空载行程下部下行双边制动的制动减速度,单位m
·
s
‑2;
[0227]
a
125
——125%额定载荷行程下端下行双边制动的制动减速度,单位m
·
s
‑2;
[0228]
a、b和c为用于简化计算过程的自定义常数,分别为:a、b和c为用于简化计算过程的自定义常数,分别为:
[0229]
x与125%额定载荷产生的转动惯量有关:
[0230]
将式(26)/式(27),并带入式(33)可得:3)可得:
[0231]
将式(26)、式(27)相加,并带入式(34)可得:将式(26)、式(27)相加,并带入式(34)可得:
[0232]
将式(28)、式(29)相减可得:1.25a=ba0‑
(b x)a
125
——(36);
[0233]
将式(30)、式(33)和式(35)带入式(36),整理得到125%额定载荷行程下端下行双边制动的制动减速度表达式:
[0234]
步骤s14、计算100%额定载荷行程下端下行单边制动减速度:
[0235]
根据式(8)和表2中参数建立三种空载制动工况和100%额定载荷制动工况的动力学方程组:
[0236]
上述方程组中:
[0237]
a1——空载行程中部上行双边制动的制动减速度,单位m
·
s
‑2;
[0238]
a2——空载行程中部下行双边制动的制动减速度,单位m
·
s
‑2;
[0239]
a0——空载行程下部下行双边制动的制动减速度,单位m
·
s
‑2;
[0240]
a
100
——100%额定载荷行程下端下行单边制动的制动减速度,单位m
·
s
‑2;
[0241]
a、b和c为用于简化计算过程的自定义常数,分别为:a、b和c为用于简化计算过程的自定义常数,分别为:
[0242]
式(38)中x
′
与100%额定载荷产生的转动惯量有关:与100%额定载荷产生的转动惯量有关:参考上文125%额定载荷制动减速度计算方法,得到100%额定载荷行程下端下行单边制动的制动减速度表达式:
[0243]
步骤s2、根据计算模型的判断条件,进行电梯有载下行制动性能无载荷测试,要满足gb7588和tsg t7001中有载制动性能要求,制动减速度应大于零,以满足减速要求,因此有:
[0244][0245]
将式(37)和式(40)分别代入上述不等式组,整理可得平衡系数与三个空载制动减速度关系:
[0246][0247]
若平衡系数k、三个空载制动减速度a1、a2、a0同时满足式(43)和式(44),说明该电梯可满足125%额定载荷行程下部下行双边制动和100%额定载荷行程下部下行单边制动的减速要求,该检验项目为合格;式(43)和式(44)即为电梯是否满足125%额定载荷行程下部下行双边制动性能和100%额定载荷行程下部下行单边制动性能的判断依据;
[0248]
具体包括:
[0249]
步骤s21、查阅资料,或进行平衡系数测试,得到被测电梯的平衡系数k;
[0250]
步骤s22、操作电梯以正常运行速度从底层开始空载上行,当轿厢运行至行程中部时切断电梯电源,进而触发双边制动器执行制动操作,通过加速度测试仪器测量从制动器开始动作到电梯完全停止过程中轿厢的平均制动减速度a1;
[0251]
步骤s23、操作电梯以正常运行速度从顶层开始空载下行,当轿厢运行至行程中部时切断电梯电源,进而触发双边制动器执行制动操作,通过加速度测试仪器测量从制动器开始动作到电梯完全停止过程中轿厢的平均制动减速度a2;
[0252]
步骤s24、操作电梯以正常运行速度从顶层开始空载下行,当轿厢运行至行程下部时切断电梯电源,进而触发双边制动器执行制动操作,通过加速度测试仪器测量从制动器开始动作到电梯完全停止过程中轿厢的平均制动减速度a0;
[0253]
步骤s25、对数据进行处理,并根据获得的平衡系数和上述三个步骤测得的三个制动减速度,判断是否满足和若符合说明电梯满足125%额定载荷下行双边制动要求,否则不满足;若符合说明电梯满足100%额定载荷下行单边制动要求,否则不满足。
[0254]
具体实施例二:
[0255]
如图2所示,主控制器4、制动减速度测量模块1、制动瞬间检测模块2和制动触发模块3均置于电梯机房01的内部。其中,主控制器4选用笔记本电脑41,制动减速度测量模块1选用旋转编码器模块11。笔记本电脑41通过有线连接方式与旋转编码器模块11、制动瞬间检测模块2、制动触发模块3相连,从而实现对模块的控制和数据获取。
[0256]
通过将旋转编码器模块11中与旋转编码器同轴固定连接的测速滚轮10与电梯曳引钢丝绳9接触,电梯轿厢6运行时带动测速滚轮10转动,旋转编码器模块11中旋转编码器输出的脉冲信号经换算后可实现电梯轿厢6的速度和加减速度测试。笔记本电脑41控制制动触发模块3使控制柜02中动力回路主继电器触点断开,进而触发电梯控制系统对外输出制动命令,使制动器72的制动线圈失电,实现对制动轮71进行制动。在整个测试过程中,制
动瞬间检测模块2连续监测电梯的制动器72中制动状态确认开关的通断状态,并将信号反馈给笔记本电脑41,当制动器72对制动轮71进行制动的瞬间制动状态确认开关的通断状态发生改变,该时刻被笔记本电脑41记录。
[0257]
具体实施例三:
[0258]
如图3所示,主控制器4、制动瞬间检测模块2和制动触发模块3均置于电梯机房01的内部,制动减速度测量模块1采用加速度传感器12、并置于电梯轿厢6的内部。其中,主控制器4为单片机42,制动减速度测量模块1选用加速度传感器12,可对制动过程中电梯轿厢6的减速度进行直接测量。单片机42通过wifi无线通讯方式与加速度传感器12、制动瞬间检测模块2、制动触发模块3相连,实现对模块的控制和数据获取。进一步地,为确保信号准确传输,可在单片机42与各模块之间设置信号中转模块8,如wifi路由器。
[0259]
测试时,加速度传感器12直接测量电梯轿厢6的减速度数值,并将信号传送到单片机42。单片机42控制制动触发模块3使控制柜02中动力回路主继电器触点断开,进而触发电梯控制系统对外输出制动命令,使制动器72的制动线圈失电,实现对制动轮71进行制动。在整个测试过程中,制动瞬间检测模块2连续监测电梯的制动器72中制动状态确认开关的通断状态,并将信号反馈给单片机42,当制动器72对制动轮71进行制动的瞬间制动状态确认开关的通断状态发生改变,该时刻被单片机42记录。
[0260]
综上所述,现有技术无法通过空载制动减速度对有载制动减速度进行定量计算。而本实用新型实施例提供的电梯有载下行制动性能的无载荷测试系统及方法,能够根据电梯制动过程动力学模型,建立电梯有载下行制动减速度的定量计算模型,根据该计算模型能够良好地实现空载制动试验对有载制动性能的评估。
[0261]
以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。