1.本技术涉及路面检测技术领域,尤其是涉及一种路面平整度检测装置。
背景技术:
2.由于交通日益发达,道路建设也极为普遍,道路建设建设中常常需要对路面进行平整度检测,平整度是路面施工质量与服务水平的重要指标之一。
3.相关技术可参考授权公告号为cn211446509u中国实用新型专利,其公开了一种路面平整度检测装置,包括移动板,移动板的下表面的四角均固定安装有一组支腿,每一组支腿的底端均固定安装有一组自锁式万向轮,移动板的下表面固定安装有一组第一固定板和第二固定板,第一固定板远离第二固定板的侧面固定安装有一组旋转电机,第一固定板和第二固定板之间设置有一组转轴,转轴的一端穿过第一固定板与旋转电机的输出端固定连接,转轴的另一端通过轴承与第二固定板连接,转轴的圆周面固定套装有清洁辊,清洁辊的内圆周面与转轴的圆周面固定连接,清洁辊外圆周面设置有刷毛。
4.针对上述中的相关技术,发明人认为存在以下缺陷:清洁辊清理路面的垃圾后,没有及时收集清洁辊清扫的垃圾,可能会存在遗留在路面上情况。
技术实现要素:
5.为了便于及时收集清洁辊清扫的垃圾,本技术提供一种路面平整度检测装置。
6.本技术提供的一种路面平整度检测装置,采用如下的技术方案:
7.一种路面平整度检测装置,包括移动板和清洁辊,所述移动板的底侧安装有吸尘机,所述吸尘机的进气口连通有第一清洁管,所述第一清洁管远离吸尘机的一端连通有负压罩,所述负压罩的开口正对清洁辊设置,所述吸尘机的排气口上连通有第二清洁管,所述移动板的底侧固定连接于有储物盒,所述储物盒内开设有有内腔,所述内腔的内侧壁上开设有第一进料口,所述第二清洁管与第一进料口相连通,所述内腔的内侧壁上还开设有多个过滤排风孔。
8.通过采用上述技术方案,为了便于及时收集清洁辊清扫的垃圾,在清洁辊清扫地面的杂物过程中,通过启动吸尘机工作,在吸尘机的作用下,清洁辊清扫的垃圾被吸入负压罩中,随后经过第一清洁管、吸尘机以及第二清洁管后,进人储物盒中,进入储物盒中的气体通过滤排风孔排出,从而达到便于及时收集清洁辊清扫的垃圾的目的。
9.优选的,所述内腔的一侧侧壁呈开口设置,所述内腔内滑动连接有垃圾盒,所述垃圾盒的内部中空,且垃圾盒的顶侧呈开口设置,对应第一进料口在垃圾盒上开设有第二进料口,所述垃圾盒远离第二清洁管的一侧固定安装有过滤板,所述储物盒上设置有用于固定垃圾盒的固定机构。
10.通过采用上述技术方案,通过设置垃圾盒,便于清理进入储物盒中的杂物,同时通过设置过滤板,能够使得进入垃圾盒气体从过滤板中排出。
11.优选的,所述固定机构包括第一u形块、第二u形块、转动杆以及限位杆,所述第一u
形块固定连接于储物盒上,所述第二u形块固定连接于垃圾盒上,所述转动杆与储物盒的侧壁相连接,所述限位杆的一端开设有通孔,所述转动杆与通孔间隙配合,所述限位杆的另一端搭接于第一u形块,且限位杆与第二u形块搭接配合;所述通孔内开设有限位槽,所述转动杆上固定连接有限位块,所述限位块滑动连接于限位槽;所述固定机构还包括用于限位限位杆转动的限位组件。
12.通过采用上述技术方案,为了便于将垃圾盒固定于储物盒内,先解除限位组件对转动杆的限制作用,接着通过转动限位杆,转动限位杆的同时,由于限位块和限位槽的相互作用下,使得限位杆带动转动杆转动;当转动限位杆至,限位杆的远离转动杆的一端搭接在第一u形块上时,限位杆还与第二u形块搭接配合,接下来在限位组件的作用下限位转动杆转动,从而达到限位限位杆转动的目的,进而达到便于将垃圾盒固定于储物盒内的目的。
13.优选的,所述限位组件包括棘轮、棘爪以及弹簧,所述棘轮固定连接于转动杆上,所述棘爪固定连接于储物盒的侧壁上,所述棘轮与棘爪相配合,所述储物盒的侧壁上开设有凹槽,所述棘轮能够移动至凹槽内,所述凹槽的槽底开设有滑槽,所述转动杆滑动连接于滑槽;所述弹簧的一端固定连接于滑槽的槽底,另一端抵接于转动杆。
14.通过采用上述技术方案,当需要转动限位杆的时,先通过推动转动杆移动,转动杆移动压缩弹簧,转动杆移动带动棘轮移动,使得棘轮移动至凹槽内,从而解除棘爪对棘轮的限制作用,当转动限位杆至合适的角度后,不再对转动杆施加外力作用,此时在弹簧的弹力作用下,弹簧推动转动杆移动,转动杆移动带动棘轮移动,从而使得棘轮与棘爪相配合,进而在棘爪的作用下达到限制棘轮和转动杆转动的目的。
15.优选的,所述滑槽的侧壁上开设有环形槽,所述转动杆上固定连接有限位环,所述限位环滑动连接于环形槽。
16.通过采用上述技术方案,通过设置限位环,便于降低转动杆脱离滑槽的可能性。
17.优选的,所述第一u形块的水平部分固定连接有第一磁铁,所述限位杆上固定连接有第二磁铁,所述第一磁铁和第二磁铁相互靠近的一侧为异名磁极。
18.通过采用上述技术方案,通过设置第一磁铁和第二磁铁,便于增加限位杆搭接于第一u形块上的稳定性。
19.优选的,所述第一u形块的水平部分的上表面固定连接有第一橡胶垫,所述第二u形块的水平部分固定连接有第二橡胶垫。
20.通过采用上述技术方案,通过设置第一橡胶垫和第二橡胶垫,便于降低限位杆与第一u形块和第二u形块之间的刚性接触。
21.优选的,所述清洁辊的外周面固定连接有刷毛,所述移动板上固定连接有多个清洁钩,多个所述清洁钩均能够于清洁辊上的刷毛相配合。
22.通过采用上述技术方案,通过设置清洁钩,便于清理粘附在刷毛上的杂物。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.为了便于及时收集清洁辊清扫的垃圾,在清洁辊清扫地面的杂物过程中,通过启动吸尘机工作,在吸尘机的作用下,清洁辊清扫的垃圾被吸入负压罩中,随后经过第一清洁管、吸尘机以及第二清洁管后,进人储物盒中,进入储物盒中的气体通过滤排风孔排出,从而达到便于及时收集清洁辊清扫的垃圾的目的;
25.2.通过设置垃圾盒,便于清理进入储物盒中的杂物,同时通过设置过滤板,能够使
得进入垃圾盒气体从过滤板中排出;
26.3.为了便于将垃圾盒固定于储物盒内,先解除限位组件对转动杆的限制作用,接着通过转动限位杆,转动限位杆的同时,由于限位块和限位槽的相互作用下,使得限位杆带动转动杆转动;当转动限位杆至,限位杆的远离转动杆的一端搭接在第一u形块上时,限位杆还与第二u形块搭接配合,接下来在限位组件的作用下限位转动杆转动,从而达到限位限位杆转动的目的,进而达到便于将垃圾盒固定于储物盒内的目的。
附图说明
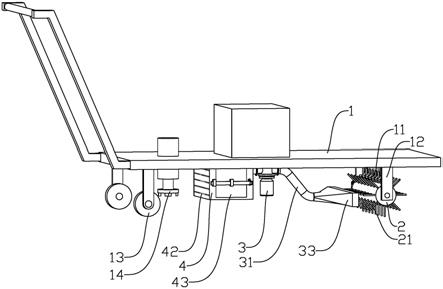
27.图1是本技术实施例的整体机构示意图;
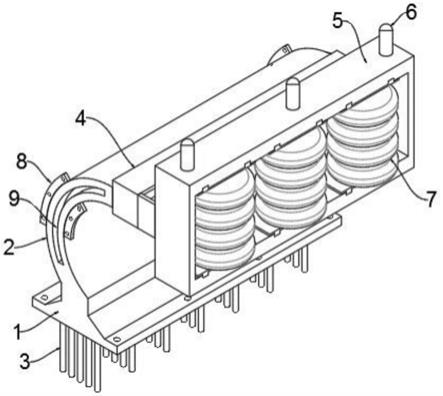
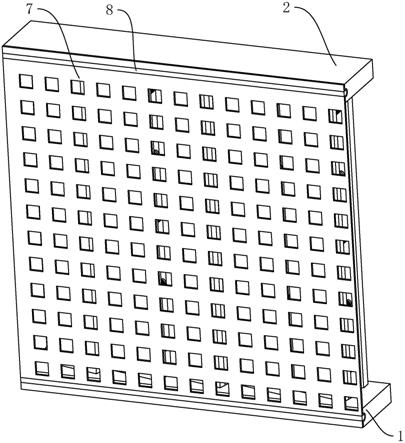
28.图2是本技术实施例中储物盒和垃圾盒的剖视图;
29.图3是本技术实施例中凸显固定机构的结构示意图;
30.图4是本技术实施例中限位杆的剖视图。
31.附图标记说明:1、移动板;11、清洁钩;12、支撑板;13、滚轮;14、图像收集器;2、清洁辊;21、刷毛;3、吸尘机;31、第一清洁管;32、第二清洁管;33、负压罩;4、储物盒;41、第一进料口;42、过滤排风孔;43、垃圾盒;431、第二进料口;432、过滤板;44、凹槽;45、滑槽;46、环形槽;47、内腔;5、固定机构;51、第一u形块;511、第一磁铁;512、第一橡胶垫;52、第二u形块;521、第二橡胶垫;53、限位杆;531、通孔;532、限位槽;533、第二磁铁;54、转动杆;541、限位块;55、限位组件;551、棘轮;552、棘爪;553、弹簧;56、限位环;57、推板。
具体实施方式
32.以下结合附图1
‑
4对本技术作进一步详细说明。
33.本技术实施例公开一种路面平整度检测装置,如图1所示,一种路面平整度检测装置包括移动板1和清洁辊2,移动板1的底侧固定安装有两个支撑板12,清洁辊2的两端分别转动连接于两个支撑板12,移动板1的底侧还转动连接有四个滚轮13,移动板1的底侧安装有用于检测路面平整度的图像收集器14。
34.如图1所示,清洁辊2的外周面固定连接有刷毛21,移动板1上固定连接有多个清洁钩11,多个清洁钩11沿移动杆的宽度方向依次均匀的排例,多个清洁钩11均位于清洁辊2的正上方,且多个清洁钩11均能够与刷毛21相配合。通过设置清洁钩11,便于清理粘附在刷毛21上的杂物。
35.如图1和图2所示,移动板1的底侧还安装有吸尘机3,吸尘机3的进气口处连接有第一清洁管31,第一清洁管31远离吸尘机3的一端连接有负压罩33,负压罩33的开口处正对清洁辊2设置。移动板1的底侧还固定连接有储物盒4,储物盒4内开设有内腔47,内腔47靠近吸尘机3的一侧开设有第一进料口41,吸尘机3的排气口处连通有第二清洁管32,第二清洁管32与第一进料口41相连通,内腔47的远离吸尘机3一侧的侧壁上开设有多个过滤排风孔42。
36.如图1和图2所示,内腔47的一侧侧壁呈开口设置,内腔47内滑动连接有垃圾盒43,垃圾盒43内部中空,且垃圾盒43的顶侧呈开口设置,对应储物盒4的第一进料口41在垃圾盒43上开设有第二进料口431。垃圾盒43远离第二清洁管32的一侧固定安装有过滤板432。通过设置垃圾盒43,便于清理进入储物盒4中的杂物,同时通过设置过滤板432,能够使得进入垃圾盒43气体从过滤板432中排出。
37.如图1和图3所示,储物盒4上设置有用于固定垃圾盒43的固定机构5,固定机构5包括第一u形块51、第二u形块52、限位杆53、转动杆54、限位环56以及限位组件55,第一u形块51固定连接与储物盒4的侧壁上,第二u形块52固定连接有垃圾盒43的侧壁上。储物盒4的侧壁上开设有开口为圆形的凹槽44,凹槽44的槽底开设有开口为圆形的滑槽45。转动杆54呈圆形杆状结构,转动杆54滑动连接于滑槽45,且转动杆54和第一u形块51关于垃圾盒43对称设置。滑槽45的内侧壁开设有环形槽46,环形槽46的纵截面呈圆环形,限位环56呈圆环形板状结构,限位环56固定连接于转动杆54上,且限位环56滑动连接于环形槽46。通过设置限位环56,便于降低转动杆54脱离滑槽45的可能性。限位杆53呈矩形杆状结构,限位杆53的一端开设有通孔531,转动杆54与通孔531间隙配合,通孔531的内侧壁上开设有两个限位槽532,转动杆54上固定连接有两个的限位块541,两个限位滑动连接于两个限位槽532。
38.为了便于将垃圾盒43固定于储物盒4内,先解除限位组件55对转动杆54的限制作用,接着通过转动限位杆53,转动限位杆53的同时,由于限位块541和限位槽532的相互作用下,使得限位杆53带动转动杆54转动;当转动限位杆53至,限位杆53的远离转动杆54的一端搭接在第一u形块51上时,限位杆53还与第二u形块52搭接配合,接下来在限位组件55的作用下限位转动杆54转动,从而达到限位限位杆53转动的目的,进而达到便于将垃圾盒43固定于储物盒4内的目的。
39.如图1和图3所示,限位组件55包括推板57、棘轮551、棘爪552以及弹簧553,推板57呈圆形板状结构,推板57固定连接于转动杆54远离限位环56的一端。棘轮551固定连接于转动杆54的外周面上,且棘轮551能够移动至凹槽44内。棘爪552固定连接于储物盒4的侧壁上,且棘爪552于棘轮551相配合。弹簧553设置于滑槽45内,弹簧553的一端固定连接于滑槽45的槽底,弹簧553另一端抵接于转动杆54远离推板57的一侧。
40.当需要转动限位杆53的时,先通过推板57移动带动转动杆54移动,转动杆54移动压缩弹簧553,转动杆54移动带动棘轮551移动,使得棘轮551移动至凹槽44内,从而解除棘爪552对棘轮551的限制作用,当转动限位杆53至合适的角度后,不再推板57施加外力作用,此时在弹簧553的弹力作用下,弹簧553推动转动杆54移动,转动杆54移动带动棘轮551移动,从而使得棘轮551与棘爪552相配合,进而在棘爪552的作用下达到限制棘轮551和转动杆54转动的目的。
41.如图3和图4所示,第一u形块51的水平部分上固定连接有第一磁铁511,且第一磁铁511上嵌在第一u形块51的水平部分上。对应第一磁铁511在限位杆53的底侧固定连接有第二磁铁533,第二磁铁533嵌在限位杆53上,第一磁铁511和第二磁铁533相互靠近的一侧为异名磁极。通过设置第一磁铁511和第二磁铁533,便于增加限位杆53搭接于第一u形块51上的稳定性。
42.如图3和图4所示,第一u形块51的上平部分的上表面固定连接有第一橡胶垫512,第二u形块52的水平部分的上表面固定连接有第二橡胶垫521,第一橡胶垫512和第二橡胶垫521均与限位杆53的底侧相抵接。通过设置第一橡胶垫512和第二橡胶垫521,便于降低限位杆53与第一u形块51和第二u形块52之间的刚性接触。
43.本技术实施例一种路面平整度检测装置的实施原理为:为了便于及时收集清洁辊2清扫的垃圾,在清洁辊2清扫地面的杂物过程中,通过启动吸尘机3工作,在吸尘机3的作用下,清洁辊2清扫的垃圾被吸入负压罩33中,随后经过第一清洁管31、吸尘机3以及第二清洁
管32后,进人储物盒4中,进入储物盒4中的气体通过滤排风孔42排出,从而达到便于及时收集清洁辊2清扫的垃圾的目的。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。