技术特征:
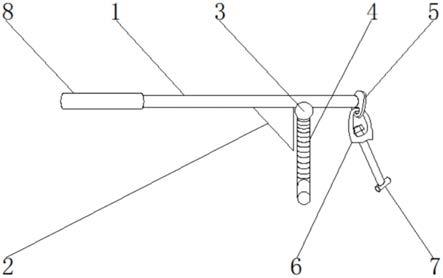
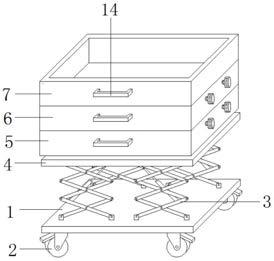
1.微型工业现场机器人实训平台,包括:具有内腔的桌体(1)、安装在所述桌体(1)内部能够升降的升降板(2),所述桌体(1)顶端开口,所述开口盖合有盖板(3),所述升降板(2)安装有控制台,其特征在于;所述桌体(1)一侧通过铰链以旋转的方式连接所述盖板(3),所述盖板(3)远离铰链侧通过快拆结构(5)活动连接有支腿(4),以便所述盖板(3)扩展所述桌体(1)面积,所述支腿(4)竖直地支撑所述盖板(3),或所述盖板(3)盖合在所述开口上,所述支腿(4)平行于所述盖板(3)地收纳在所述盖板(3)上。2.根据权利要求1所述的微型工业现场机器人实训平台,其特征在于;所述快拆结构(5)包括固连在所述盖板(3)上的定位套(501)和形成在所述支腿(4)上的定位柱;所述定位柱与所述定位套(501)卡合或脱离。3.根据权利要求2所述的微型工业现场机器人实训平台,其特征在于;所述定位套(501)开设有引导所述定位柱入位的滑道(502),所述滑道(502)呈l型结构,所述定位柱侧壁形成有与所述滑道(502)滑动连接的凸块(505),所述凸块(505)与所述滑道(502)能够卡合或脱离。4.根据权利要求3所述的微型工业现场机器人实训平台,其特征在于;所述定位柱包括呈圆锥体结构的第一导向段(506)和形成在所述第一导向段(506)端部呈圆柱体结构的第二导向段(507);所述第一导向段(506)远离所述第二导向段(507)端与所述支腿(4)固定连接;所述第二导向段(507)侧壁固连有所述凸块(505)。5.根据权利要求2
‑
4任一项所述的微型工业现场机器人实训平台,其特征在于;所述定位柱包括第一定位柱(503)和第二定位柱(504);所述支腿(4)顶端固连有第一定位柱(503),所述支腿(4)侧部固连有第二定位柱(504);其中,所述第一定位柱(503)的轴线与所述第二定位柱(504)的轴线垂直。6.根据权利要求1所述的微型工业现场机器人实训平台,其特征在于;所述桌体(1)至少一端安装有使所述桌体(1)和所述盖板(3)保持水平展开的保险栓(101)。7.根据权利要求6所述的微型工业现场机器人实训平台,其特征在于;所述桌体(1)位于所述盖板(3)侧的两端均滑动连接有所述保险栓(101),所述盖板(3)对应所述保险栓(101)的位置开设有滑槽(301),以便所述保险栓(101)进入所述滑槽(301),使所述盖板(3)保持与所述桌体(1)上表面平行。8.根据权利要求1所述的微型工业现场机器人实训平台,其特征在于;所述支腿(4)为伸缩杆结构。
技术总结
本实用新型公开了一种微型工业现场机器人实训平台,属于机器人仿真实训技术领域;本实用新型包括具有内腔的桌体、安装在所述桌体内部能够升降的升降板,所述桌体顶端开口,所述开口盖合有盖板,所述升降板安装有控制台;所述桌体一侧通过铰链以旋转的方式连接所述盖板,所述盖板远离铰链侧通过快拆结构活动连接有支腿,以便所述盖板扩展所述桌体面积,所述支腿竖直地支撑所述盖板,或所述盖板盖合在所述开口上,所述支腿平行于所述盖板地收纳在所述盖板上,本实用新型具有实用性强,结构简单、使用方便,稳定性、可靠性高的有益效果。可靠性高的有益效果。可靠性高的有益效果。
技术研发人员:周宇
受保护的技术使用者:长春市高新东卓汽车电子有限公司
技术研发日:2021.04.02
技术公布日:2021/11/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。