1.本发明涉及一种抛光装置,具体涉及适用于玻璃材质的高精度光学抛光及修整面型的一种机器人轮式抛光装置。
背景技术:
2.目前,对于小工具抛光及气囊抛光虽然能完成抛光,但一是转速有限,线速度也有限,加工效率不够;二是加工束径不够小,不能减轻抛光的边缘效应。
技术实现要素:
3.本发明的目的是提供一种机器人轮式抛光装置,相对于小工具抛光及气囊抛光,转速更高,线速度更快,拥有更高的加工效率;加工束径小;减轻抛光的边缘效应;抛光轮采用球面设计,更贴合加工工件;相比小工具抛光,结构更稳固;采用六轴机器人代替传统机床,位移更加灵活,可以加工难度更大的非球面。
4.为了达到上述目的,本发明有如下技术方案:
5.本发明的一种机器人轮式抛光装置,包括六轴机器人,轮式抛光夹具,机器人安装板,伺服电机,减速机,公转机构安装座,花键轴套,花键轴,低摩擦气缸,气缸推板,提拉套,上锥齿轮,下锥齿轮,自转机构安装轴,自转机构安装座,从动轴,自转轴,从动轴同步轮,自转轴同步轮,同步齿形带,抛光内轮,柔性抛光外轮,机器人安装板安装在六轴机器人上,公转机构安装座安装在机器人安装板上,减速机和低摩擦气缸安装在公转机构安装座上,伺服电机安装在减速机上,花键轴套安装在减速机上,花键轴与花键轴套滑动配合连接,气缸推板安装在低摩擦气缸上,气缸推板与提拉套连接,上锥齿轮与自转机构安装轴连接,自转机构安装轴安装在花键轴上,自转机构安装座安装在自转机构安装轴上,下锥齿轮与上锥齿轮啮合,从动轴与下锥齿轮连接,从动轴同步轮与从动轴连接,同步齿形带与从动轴同步轮连接,自转轴同步轮与同步齿形带连接,自转轴与自转轴同步轮连接,自转轴穿过自转机构安装座下端与抛光内轮连接,柔性抛光外轮安装在抛光内轮的外圈。
6.其中,所述低摩擦气缸为对称安装在公转机构安装座两侧的低摩擦气缸;所述气缸推板中部位多边形,便于连接公转机构安装座和提拉套,气缸推板两端为突出的矩形,便于承接低摩擦气缸。
7.其中,所述花键轴与公转机构安装座之间设有深沟球轴承,所述键轴与提拉套之间设有深沟球轴承,所述自转机构安装轴与提拉套之间设有深沟球轴承,所述从动轴与自转机构安装座上端之间设有深沟球轴承,所述自转轴与自转机构安装座下端之间设有深沟球轴承。
8.其中,所述柔性抛光外轮与抛光内轮通过粘接结合在一起;柔性抛光外轮表面为球面。
9.其中,所述公转机构安装座与气缸推板之间设有销、销座,其中,销的一端连接在公转机构安装座底部,销的另一端插入销座,销座连接气缸推板。
10.由于采取了以上技术方案,本发明的的优点在于:
11.1、相对于小工具抛光及气囊抛光,转速更高,线速度更快,拥有更高的加工效率;
12.2、加工束径小,减轻抛光的边缘效应;
13.3、抛光轮采用球面设计,更贴合加工工件;
14.4、相比小工具抛光,结构更稳固;
15.5、采用六轴机器人代替传统机床,位移更加灵活,可以加工难度更大的非球面。
附图说明
16.图1为本发明的结构示意图;
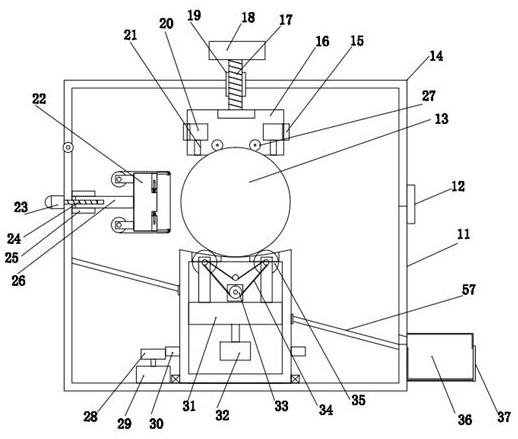
17.图2为本发明的轮式抛光装置的放大示意图;
18.图3为图2的剖视图的放大示意图。
19.图中,1.六轴机器人;2.轮式抛光装置;3.机器人安装板;4.伺服电机;5.减速机;6.公转机构安装座;7.花键轴套;8.花键轴;9.低摩擦气缸;10.气缸推板;11.提拉套;12.上锥齿轮;13.下锥齿轮;14.自转机构安装轴;15.自转机构安装座;16.从动轴;17.自转轴;18.从动轴同步轮;19.自转轴同步轮;20.同步齿形带;21.抛光内轮;22.柔性抛光外轮;23、深沟球轴承;24、销;25销座。
具体实施方式
20.以下实施例用于说明本发明,但不用来限制本发明的范围。
21.本发明的本发明的一种机器人轮式抛光装置,包括六轴机器人,轮式抛光夹具,机器人安装板,伺服电机,减速机,公转机构安装座,花键轴套,花键轴,低摩擦气缸,气缸推板,提拉套,上锥齿轮,下锥齿轮,自转机构安装轴,自转机构安装座,从动轴,自转轴,从动轴同步轮,自转轴同步轮,同步齿形带,抛光内轮,柔性抛光外轮,机器人安装板安装在六轴机器人上,公转机构安装座安装在机器人安装板上,减速机和低摩擦气缸安装在公转机构安装座上,伺服电机安装在减速机上,花键轴套安装在减速机上,花键轴与花键轴套滑动配合连接,气缸推板安装在低摩擦气缸上,气缸推板与提拉套连接,上锥齿轮与自转机构安装轴连接,自转机构安装轴安装在花键轴上,自转机构安装座安装在自转机构安装轴上,下锥齿轮与上锥齿轮啮合,从动轴与下锥齿轮连接,从动轴同步轮与从动轴连接,同步齿形带与从动轴同步轮连接,自转轴同步轮与同步齿形带连接,自转轴与自转轴同步轮连接,自转轴穿过自转机构安装座下端与抛光内轮连接,柔性抛光外轮安装在抛光内轮的外圈。
22.所述机器人安装板为矩形,其下部紧贴公转机构安装座连接固定,上部有若干个安装孔,机器人安装板通过若干个安装孔与六轴机器人稳固连接;公转机构安装座为中空长方体。
23.所述低摩擦气缸为对称安装在公转机构安装座两侧的低摩擦气缸;所述气缸推板中部位多边形,便于连接公转机构安装座和提拉套,气缸推板两端为突出的矩形,便于承接低摩擦气缸。
24.所述花键轴与公转机构安装座之间设有深沟球轴承,所述键轴与提拉套之间设有深沟球轴承,所述自转机构安装轴与提拉套之间设有深沟球轴承,所述从动轴与自转机构安装座上端之间设有深沟球轴承,所述自转轴与自转机构安装座下端之间设有深沟球轴
承。
25.所述柔性抛光外轮与抛光内轮通过粘接结合在一起;柔性抛光外轮表面为球面。
26.所述公转机构安装座与气缸推板之间设有销、销座,其中,销的一端连接在公转机构安装座底部,销的另一端插入销座,销座连接气缸推板。
27.本发明工作过程:
28.1)、六轴机器人1带动轮式抛光装置具2移动;
29.2)、伺服电机4通过减速机5带动花键轴套7旋转,并依次传递给花键轴8、自转机构安装轴14、自转机构安装座,使得后续抛光内轮及柔性抛光外轮能沿着伺服电机输出轴公转;
30.3)、花键轴套7与花键轴8滑动配合;
31.4)、低摩擦气缸9带动气缸推板10、提拉套11等机构伸出,利用花键轴与花键轴套和销24导向,使得整个轮式抛光装置能稳定输出恒定的压力;就是要使得柔性抛光外轮能以恒定的压力压在工件上实施抛光;
32.5)、同时上、下锥形齿轮传动,使得抛光内轮及柔性抛光外轮能进行自转;
33.伺服电机的厂家和型号:富士gyb401d5
‑
rg2,但不限于该产品;
34.六轴机器人的厂家和型号:kuka kr 70r2100,但不限于该产品;
35.减速机的厂家和型号:neugart ple60
‑
10,但不限于该产品;
36.低摩擦气缸的厂家和型号:smc mqqtb10
‑
20d,但不限于该产品;
37.显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无法对所有的实施方式予以穷举。凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。