1.本发明涉及智能焊接机器人技术领域,特别涉及一种双机器人横焊工作站及横焊方法。
背景技术:
2.单面焊双面成型就是在一面焊接,另一面焊缝也能够成形良好,多用在管子焊接上,内部无法再进行焊接,单面焊双面成型有连弧焊、断弧焊之说。单面焊双面成形操作技术是采用普通焊条,以特殊的操作方法,在坡口的正面进行焊接,焊后保证坡口正反两面都能得到良好的焊缝的一种操作方法。
3.一般好的焊工可以做到双面成型,但是双面成型的技术并不是很容易就可以掌握的,需要相当的经验及领悟能力,所以很少用到单面焊双面成型技术,除非迫不得已,一般都用氩弧焊代替。单面焊双面成形的根焊层不光,容易出现夹渣,还易出现未融合,最易出现的是焊瘤。
技术实现要素:
4.针对上述问题,本发明的目的在于提供一种双机器人横焊工作站及横焊方法,以解决横焊v型破口的焊接打底,单面焊双面成形的根焊层不光,容易出现夹渣、未融合及出现焊瘤的问题。
5.为了实现上述目的,本发明采用以下技术方案:
6.本发明实施例提供的一种双机器人横焊工作站,包括右直线模组、工作台、定位工装、右滑板、左滑板、左焊接机器人系统、右焊接机器人系统及左直线模组,其中定位工装设置于工作台上,定位工装用于定位待焊接的上立板和下立板,上立板和下立板之间形成具有双v型坡口的横焊缝;左直线模组和右直线模组分别设置于工作台的两侧,左滑板和右滑板分别设置于左直线模组和右直线模组上,左焊接机器人系统和右焊接机器人系统分别设置于左滑板和右滑板上,左焊接机器人系统和右焊接机器人系统在双v型坡口的两侧同时进行焊接,并且在进行打底焊时形成共熔池。
7.在一种可能的实现方式中,所述左滑板和所述右滑板均为t型结构,所述左焊接机器人系统和所述右焊接机器人系统分别设置于所述左滑板和所述右滑板的顶部。
8.在一种可能的实现方式中,所述左焊接机器人系统包括左焊接机器人和左侧焊枪,其中左焊接机器人倒挂于所述左滑板顶部,且执行末端与左侧焊枪连接;
9.在一种可能的实现方式中,所述右焊接机器人系统包括右焊接机器人和右侧焊枪,其中右焊接机器人倒挂在所述右滑板的顶部,且执行末端与右侧焊枪连接。
10.在一种可能的实现方式中,所述左焊接机器人和所述右焊接机器人均采用六自由度垂直多关节型焊接机器人。
11.在一种可能的实现方式中,所述定位工装包括四个定位柱,其中两个定位柱用于定位所述上立板和下立板的一侧面,另外两个定位柱用于定位所述上立板和下立板的另一
侧面。
12.本发明另一实施例中,提供一种如上实施例中所述的双机器人横焊工作站的横焊方法,包括如下步骤:
13.待焊接的上立板和下立板通过定位工装定位在工作台上,上立板的下端和下立板的上端之间形成具有双v型坡口的横焊缝;
14.左直线模组和右直线模组分别驱动左焊接机器人系统和右焊接机器人系统至横焊缝的一端;
15.左焊接机器人和右焊接机器人分别带动左侧焊枪和右侧焊枪至双v型坡口两侧底部,进行打底焊,并且形成共熔池;
16.左直线模组和右直线模组分别驱动左焊接机器人系统和右焊接机器人系统继续做直线运动,使左侧焊枪和右侧焊枪完成打底横焊,形成双v型坡口底部的狭窄部焊缝;
17.在双v型坡口外侧的宽阔部进行焊接,左侧焊枪和右侧焊枪沿横向同步进行多层多道叠焊,直至填满双v型坡口外侧的宽阔部,从而完成整个横焊工艺过程。
18.在一种可能的实现方式中,所述双v型坡口包括位于左侧的左下破口和左上破口及位于右侧的右下坡口和右上坡口;
19.所述共熔池包括相互连通的共熔池左部和共熔池右部;
20.所述左侧焊枪喷射出的保护气体,经过左下破口和左上破口的导流作用,悬浮托举冷却共熔池左部;
21.所述右侧焊枪喷射出的保护气体,经过右下坡口和右上坡口的导流作用,悬浮托举冷却共熔池右部。
22.在一种可能的实现方式中,在所述双v型坡口的宽阔部进行多层多道叠焊时,每道叠焊在前一道焊缝宽度的1/3处开始施焊。
23.在一种可能的实现方式中,所述左侧焊枪上的左侧焊丝和所述右侧焊枪上的右侧焊丝对称设置。
24.在一种可能的实现方式中,所述双v型坡口的底部狭窄部焊缝是所述左侧焊枪和所述右侧焊枪采用往复直线运条的方法完成。
25.本发明的优点及有益效果是:本发明提供的一种双机器人横焊工作站及横焊方法,操作简单,实现自动焊接,保证焊接质量;
26.本发明采用双机器人在双v型坡口的两侧同时进行焊接,具有起始共熔池点和终止共熔池点,双v型坡口的狭窄部熔接金属纯度高,有效避免出现夹渣,提高融合性,焊缝光滑,不会出现焊瘤现象;
27.本发明采用双机器人在双v型坡口的两侧同时进行焊接,熔池的融化状态时间长,铁水流动性好,气体逃逸时间长,保证产品质量;
28.本发明采用双机器人在双v型坡口的两侧同时进行焊接,双v型坡口的两侧热量同步且均匀,可以有效控制焊后变形。
29.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
30.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
31.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
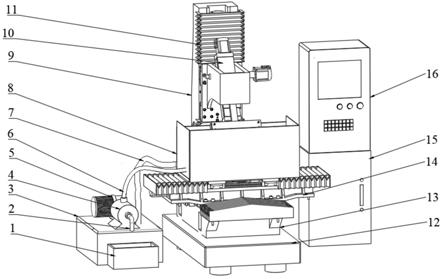
32.图1为本发明实施例中一种双机器人横焊工作站的轴测图;
33.图2为本发明实施例中一种双机器人横焊工作站的主视图;
34.图3为图2中i处放大图;
35.图中:1、右直线模组,2、工作台,3、定位工装,4、右滑板,5、左滑板,6、左焊接机器人,7、右焊接机器人,8、下立板,9、上立板,10、右上坡口,11、右侧焊枪,12、右侧焊丝,13、共熔池右部,14、左侧焊枪,15、左侧焊丝,16、共熔池左部,17、左上破口,18、左下破口,19、右下坡口,20、左直线模组。
具体实施方式
36.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
37.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
38.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
39.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
40.本发明一实施例提供的一种双机器人横焊工作站,具有起始共熔池点和终止共熔池点,双v型坡口的狭窄部熔接金属纯度高,有效避免出现夹渣,提高融合性,焊缝光滑,不会出现焊瘤现象。参见图1至图3所示,该双机器人横焊工作站,包括右直线模组1、工作台2、定位工装3、右滑板4、左滑板5、左焊接机器人系统、右焊接机器人系统及左直线模组20,其中工作台2的下表面安置于地面,工作台2的上表面安装有可拆卸的定位工装3,定位工装3用于定位待焊接的上立板9和下立板8,上立板9和下立板8之间形成具有双v型坡口的横焊缝;左直线模组20和右直线模组1分别设置于工作台2的两侧,左滑板5和右滑板4分别设置于左直线模组20和右直线模组1上,左焊接机器人系统和右焊接机器人系统分别设置于左滑板5和右滑板4上,左焊接机器人系统和右焊接机器人系统在双v型坡口的两侧同时进行焊接,并且在进行打底焊时形成共熔池。
41.如图2
‑
3所示,本发明的实施例中,下立板8的下表面与工作台2的上表面贴合,上
立板9放置于下立板8的上方,下立板8和上立板9的水平位姿由定位工装3限定。具体地,下立板8的上端具有左下破口18和右下坡口19,上立板9的下端具有左上破口17和右上坡口10,左下破口18和左上破口17之间形成左v型坡口;右下坡口19和右上坡口10之间形成右v型坡口。
42.如图1
‑
2所示,本发明的实施例中,定位工装3包括四个定位柱,其中两个定位柱用于定位上立板9和下立板8的一侧面,另外两个定位柱用于定位上立板9和下立板8的另一侧面。
43.本发明的实施例中,左滑板5和右滑板4均为t型结构,左焊接机器人系统和右焊接机器人系统分别设置于左滑板5和右滑板4的顶部。
44.具体地,左焊接机器人系统包括左焊接机器人6和左侧焊枪14,其中左焊接机器人6倒挂于左滑板5顶部,且执行末端与左侧焊枪14连接;右焊接机器人系统包括右焊接机器人7和右侧焊枪11,其中右焊接机器人7倒挂在右滑板4的顶部,且执行末端与右侧焊枪11连接。
45.本实施例中,左直线模组20和右直线模组1采用齿轮齿条直线驱动机构,也可采用能实现直线驱动的任何一种现有技术形式。左焊接机器人6和右焊接机器人7均采用六自由度垂直多关节型焊接机器人。
46.本发明一实施例提供的一种双机器人横焊工作站,采用双机器人在双v型坡口的两侧同时进行焊接,具有起始共熔池点和终止共熔池点,双v型坡口的狭窄部熔接金属纯度高,有效避免出现夹渣,提高融合性,焊缝光滑,不会出现焊瘤现象;采用双机器人在双v型坡口的两侧同时进行焊接,熔池的融化状态时间长,铁水流动性好,气体逃逸时间长,保证产品质量;同时,双v型坡口的两侧热量同步且均匀,可以有效控制焊后变形。
47.基于上述发明的构思,本发明的另一实施例提供了一种利用上述任一实施例中的双机器人横焊工作站的横焊方法,该横焊方法包括如下步骤:
48.待焊接的上立板9和下立板8通过定位工装3定位在工作台2上,上立板9的下端和下立板8的上端之间形成具有双v型坡口的横焊缝;
49.左直线模组20和右直线模组1分别驱动左焊接机器人系统和右焊接机器人系统至横焊缝的一端;
50.左焊接机器人6和右焊接机器人7分别带动左侧焊枪14和右侧焊枪11至双v型坡口两侧底部,进行打底焊,并且在横焊缝的根部形成共熔池;
51.左直线模组20和右直线模组1分别驱动左焊接机器人系统和右焊接机器人系统继续做直线运动,使左侧焊枪14和右侧焊枪11连续进行打底横焊,直至形成双v型坡口底部的狭窄部焊缝;
52.在双v型坡口外侧的宽阔部进行焊接,左侧焊枪14和右侧焊枪11沿横向同步进行多层多道叠焊,直至填满双v型坡口外侧的宽阔部,从而完成整个横焊工艺过程。
53.本发明的实施例中,双v型坡口包括位于左侧的左下破口18和左上破口17及位于右侧的右下坡口19和右上坡口10;共熔池包括相互连通的共熔池左部16和共熔池右部13;左侧焊枪14喷射出的保护气体,经过左下破口18和左上破口17的导流作用,悬浮托举冷却共熔池左部16;右侧焊枪11喷射出的保护气体,经过右下坡口19和右上坡口10的导流作用,悬浮托举冷却共熔池右部13。
54.本发明的实施例中,在双v型坡口的宽阔部进行多层多道叠焊时,每道叠焊在前一道焊缝宽度的1/3处开始施焊。
55.进一步地,左侧焊枪14上的左侧焊丝15和右侧焊枪11上的右侧焊丝12对称设置。双v型坡口的底部狭窄部焊缝是左侧焊枪14和右侧焊枪11采用往复直线运条的方法完成。
56.本发明的实施例中,在下立板8和上立板9之间横焊缝的根部间隙,可以塞入临时垫片实现。也可采用上述实施例中的根部间隙为零,即下立板8和上立板9之间贴合,电弧使根部局部熔透,左侧焊枪14通过左侧焊丝15横焊缝的左侧根部形成共熔池左部16,右侧焊枪11通过右侧焊丝12在横焊缝的右侧根部形成共熔池右部13。在共熔池右部13和共熔池左部16处,由于强电流和磁场,局部熔透,共熔池右部13和共熔池左部16内部联通一体。共熔池右部13和共熔池左部16的中心,熔接金属纯度高,有效避免出现夹渣、未融合及焊瘤的现象。
57.本发明的实施例中,在共熔池右部13和共熔池左部16的外部,即双v型坡口的宽阔部,采用电弧焊,药芯焊丝的焊接,焊后进行焊渣的清理是必须的。co2保护焊分实心和药芯的,药芯的明显有焊渣,但实心的也有一点点,那是焊丝中的脱氧元素与氧的化合物,不过量很少,在焊缝上或焊缝与工件的结合处有时有一点,双v型坡口的宽阔部便于清理焊渣,便于焊接缺陷的检测,因为焊接缺陷多形成于熔池外表面。保护气在焊接过程中用于保护金属熔滴,对焊接的生产效率和质量常常具有重要作用。保护气体在防止固化中的熔融焊缝产生氧化的同时,也阻挡可能改变接缝几何特性而削弱焊缝耐腐蚀能力、产生气孔并削弱焊缝耐久性的杂质和空气中湿气的进入。
58.本实施例是针对具有双v型坡口的横焊缝,双机器人同步联动进行打底焊接,选用带有药芯的焊丝,焊接电流较平焊时小些,短弧操作,能较好的控制熔化金属流淌。共熔池右部13和共熔池左部16对接横焊,间隙较小时,打底焊可采用直线运条;间隙较大时,打底层采用往复直线型运条,运条为焊接机器人操控焊丝的空间工艺轨迹。厚板焊接时,除打底焊缝外,宽阔部宜采用多层多道焊。多层多道焊时,要特别注意控制焊道间的重叠距离。每道叠焊,应在前一道焊缝的1/3处开始施焊,以防止产生凹凸不平。根据具体情况,保持适当的焊条角度,焊接速度应稍快且均匀。采用正确的运条方法,双v型坡口的狭窄部焊缝采用往复直线运条方法较好;双v型坡口的宽阔部,宜选用直线型或小斜环形运条,背面用直线型运条,焊接电流可适当加大。
59.本发明的实施例中,采用双机器人在双v型坡口的两侧同时进行焊接,具有起始共熔池点和终止共熔池点,双v型坡口的狭窄部熔接金属纯度高,有效避免出现夹渣,提高融合性,焊缝光滑,不会出现焊瘤现象;采用双机器人在双v型坡口的两侧同时进行焊接,熔池的融化状态时间长,铁水流动性好,气体逃逸时间长,保证产品质量;同时,双v型坡口的两侧热量同步且均匀,可以有效控制焊后变形。
60.本发明提供的一种双机器人横焊工作站及横焊方法,操作简单,实现自动焊接,保证焊接质量。
61.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。