1.本发明涉及智能焊接机器人技术领域,特别涉及一种双机器人焊接工作站及焊接方法。
背景技术:
2.目前,智能焊接机器人具有tig机器人焊接系统和mig机器人焊接系统,tig机器人焊接系统只能进行tig焊接工艺,mig机器人焊接系统只能进行mig焊接工艺,因此均具有局限性。
3.tig焊(tungsten inert gas welding),又称为非熔化极惰性气体保护电弧焊。用tig焊加填丝的方式常用于压力容器的打底焊接,原因是tig焊接的气密性较好,能降低压力容器焊焊接时焊缝的气孔。tig焊的热源为直流电弧,工作电压为10~95伏,但电流可达600安。焊机的正确连结方式是工件连结电源的正极,焊炬中的钨极作为负极,惰性气体一般为氩气。tig焊是在惰性气体的保护下,利用钨电极与焊件之间产生的电孤热熔化焊件和填充焊丝的一种焊接方法。其特点有:
4.1.惰性气体有极好的保护作用,它本身既不与金属发生化学反应,也不溶解于高温金属,使得焊接过程中熔池的冶金反应简单和容易控制,对于一般易氧化、氮化的活泼金属、高熔点的黑色金属等几乎所有金属和合金都能焊接,特别适合焊接铝、镁、钛、铜等有色金属、不锈钢、耐热钢以及压力容器及管道的打底焊。
5.2.电弧在氩气中燃烧非常稳定,在小到几安培的焊接电流情况下仍能稳定燃烧,填充丝是通过电弧间接加热,热输入容男调节,所以很适合薄板及全位置焊接,也是单面焊双面成形好的焊接方法。
6.3.由于填充丝不通过电流,不存在熔滴过渡问题,加之电弧在惰性气体中燃烧非常稳定,整个焊接过程中没有飞溅,焊缝成形细腻美观。
7.4.惰性气体在焊接过程中只起到保护隔离作用,因此对焊件表面状态要求较高。焊件在焊前要进行表面清洗、除锈、除氧化皮、除污等,必须露出金属光泽。
8.tig焊的缺点
9.1)熔深浅,熔敷速度小,生产率较低。
10.2)钨极承载电流的能力较差,过大的电流会引起钨极熔化和蒸发,其微粒有可能进入熔池,渣成污染(夹钨)。
11.3)隋性气体(氩气、氦气)较贵,和其它电弧焊方法(如手工电弧焊、埋弧焊、co2气体保护焊等)比较,生产成本较高。钨极氩弧焊可用于几乎所有金属和合金的焊接,但由于其成本较高,通常多用于焊接铝、镁、钛、铜等有色金属,以及不锈钢、耐热钢等。对于低熔点和易蒸发的金属(如铅、锡、锌),焊接较困难。钨极氩弧焊所焊接的板材厚度范围,从生产率考虑3mm以下为宜。对于某些黑色和有色金属的厚壁重要构件(如压力容器及管道),在根部熔透焊道接,全位置焊接和窄间隙接时,为了保证高的焊接质量,有时也采用钨极氩弧焊。
12.mig焊(melt inert
‑
gas welding),使用熔化电极,以外加气体作为电弧介质,并
保护金属熔滴、焊接熔池和焊接区高温金属的电弧焊方法,这种用实芯焊丝的惰性气体(ar或he)保护电弧焊法称为熔化极惰性气体保护焊,简称mig焊。
13.mig焊接除用金属丝代替钨电极外,其它和tig焊一样。因此,焊丝由电弧熔化,送入焊接区。电力驱动辊按照焊接所需从线轴把焊丝送入焊炬。热源也是直流电弧,所用保护气体也不同,要在氩气内加入1%氧气,来改善电弧的稳定性。在基本工艺上也有些不同,例如,喷射传递、脉动喷射、球状传递和短路传递。mig焊接效率高,但是焊接质量不能满足压力容器的焊接需要。tig焊接质量高,但是效率不高。
技术实现要素:
14.针对上述问题,本发明的目的在于提供一种双机器人焊接工作站及焊接方法,以解决mig焊的焊接质量不能满足压力容器的焊接要求及tig焊效率不高的问题。
15.为了实现上述目的,本发明采用以下技术方案:
16.本发明一实施例提供的一种双机器人焊接工作站,包括直线运动模组、变位机、滑板、焊接机器人ⅰ、焊接机器人ⅱ、mig焊枪及tig焊枪,其中直线运动模组设置于变位机的一侧,变位机用于驱动待焊接工件ⅰ和工件ⅱ同步转动;滑板的下端与直线运动模组连接,上端设有焊接机器人ⅰ和焊接机器人ⅱ,tig焊枪和mig焊枪分别设置于焊接机器人ⅰ和焊接机器人ⅱ的执行末端;mig焊枪用于对工件ⅰ和工件ⅱ之间的v型坡口实施mig焊,tig焊枪用于对mig焊枪完成的mig焊缝实施二次tig焊。
17.在一种可能的实现方式中,所述变位机的顶部两侧设有相互平行的两个滚筒,待焊接工件ⅰ和工件ⅱ放置于两个滚筒上。
18.在一种可能的实现方式中,所述直线运动模组的运动方向与所述变位机的旋转轴线平行。
19.在一种可能的实现方式中,所述滑板为t型结构,所述焊接机器人ⅰ和所述焊接机器人ⅱ分别倒挂于所述滑板的顶部两端。
20.在一种可能的实现方式中,所述焊接机器人ⅰ和所述焊接机器人ⅱ均为六自由度垂直多关节型焊接机器人。
21.本发明另一实施例提供的一种v型坡口焊接方法,包括如上所述的双机器人焊接工作站,其焊接方法包括如下步骤:
22.带焊接的工件ⅰ和工件ⅱ同轴放置于变位机上,工件ⅰ和工件ⅱ之间形成v型坡口;
23.在v型坡口上确定mig焊点和tig焊点;
24.焊接机器人ⅱ带动mig焊枪在mig焊点位置对v型坡口进行mig焊,形成mig熔池;
25.变位机驱动工件ⅰ和工件ⅱ同步转动;
26.当mig熔池转动至tig焊点位置时,焊接机器人ⅰ带动tig焊枪在tig焊点位置对mig熔池进行tig焊,形成tig熔池,直至完成整环焊缝。
27.在一种可能的实现方式中,所述mig熔池到达tig焊点位置时形成半凝固状态的过渡焊缝。
28.在一种可能的实现方式中,所述v型坡口为环形结构,mig焊点和tig焊点沿工件ⅰ和工件ⅱ的转动方向间隔设置。
29.在一种可能的实现方式中,所述焊接机器人ⅰ和所述焊接机器人ⅱ分别位于v型坡
口的两侧;所述焊接机器人ⅰ和所述焊接机器人ⅱ的位置通过直线运动模组进行调整。
30.本发明的优点及有益效果是:本发明提供的一种双机器人焊接工作站,兼具mig焊接和tig焊接的优点,能满足压力容器的焊接需要,同时提高了工作效率。
31.本发明提供的一种双机器人焊接工作站,首先采用mig焊,焊丝由电弧熔化,送入焊接区,焊接效率高。对mig熔池进一步采用tig焊,因填充丝不通过电流,不存在熔滴过渡问题,加之电弧在惰性气体中燃烧非常稳定,整个焊接过程中没有飞溅,焊缝成形细腻美观。tig焊接的气密性较好,能降低压力容器焊焊接时焊缝的气孔,提高焊接质量。
32.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
33.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
34.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
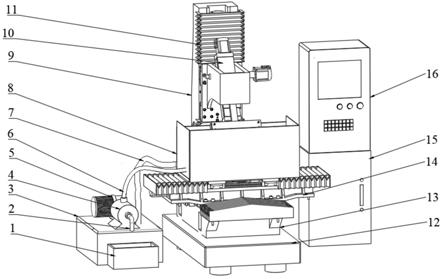
35.图1为本发明实施例中一种双机器人焊接工作站的结构示意图;
36.图2为图1中i处放大图;
37.图3为本发明实施例中一种双机器人焊接工作站的侧视图;
38.图中:1、直线运动模组,2、变位机,3、滚筒,4、工件ⅰ,5、工件ⅱ,6、滑板,7、焊接机器人ⅰ,8、焊接机器人ⅱ,9、mig焊枪,10、tig焊枪,11、v型坡口,12、mig熔池,13、过渡焊缝,14、tig熔池,15、整环焊缝,16、转动方向。
具体实施方式
39.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
40.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
41.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
42.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
43.本发明一实施例提供的一种双机器人焊接工作站,兼具mig焊接和tig焊接的优点,能满足压力容器的焊接需要,同时提高了工作效率。参见图1至图3所示,该双机器人焊接工作站,包括直线运动模组1、变位机2、滑板6、焊接机器人ⅰ7、焊接机器人ⅱ8、mig焊枪9及tig焊枪10,其中直线运动模组1设置于变位机2的一侧,变位机2用于驱动待焊接工件ⅰ4和工件ⅱ5同步转动;滑板6的下端与直线运动模组1连接,上端设有焊接机器人ⅰ7和焊接机器人ⅱ8,tig焊枪10和mig焊枪9分别设置于焊接机器人ⅰ7和焊接机器人ⅱ8的执行末端;mig焊枪9用于对工件ⅰ4和工件ⅱ5之间的v型坡口11实施mig焊,tig焊枪10用于对mig焊枪9完成的mig焊缝实施二次tig焊。
44.参见图1、图3所示,本发明的实施例中,变位机2的下表面安置于地面,变位机2的顶部两侧设有相互平行的两个滚筒3,待焊接工件ⅰ4和工件ⅱ5放置于两个滚筒3上,两个滚筒3与工件ⅰ4和工件ⅱ5的下表面贴合,变位机2驱动两个滚筒3绕自身轴线转动,进而带动工件ⅰ4和工件ⅱ5同步沿转动方向16转动,工件ⅰ4和工件ⅱ5一端的坡口相对应,形成v型坡口11。
45.直线运动模组1的运动方向与变位机2的旋转轴线平行,以便调整焊接机器人ⅰ7和焊接机器人ⅱ8的位置。
46.本发明的实施例中,滑板6为t型结构,焊接机器人ⅰ7和焊接机器人ⅱ8分别倒挂于滑板6的顶部两端。具体地,焊接机器人ⅰ7和焊接机器人ⅱ8均为六自由度垂直多关节型焊接机器人。
47.参见图2所示,本发明一实施例提供的一种双机器人焊接工作站,其工作流程如下;
48.第一步;焊接机器人ⅱ8驱动mig焊枪9至工件ⅰ4和工件ⅱ5之间的v型坡口11上方,进行mig焊,从而形成mig熔池12;
49.第二步;变位机2带动工件ⅰ4和工件ⅱ5同步转动,mig熔池12形成半凝固状态的过渡焊缝13;
50.第三步;焊接机器人ⅰ7驱动tig焊枪10至v型坡口11上方,tig焊枪10对过渡焊缝13实施二次tig焊工艺,从而形成tig熔池14;
51.第四步;变位机2继续带动工件ⅰ4和工件ⅱ5同步转动,重复上述动作,然后连续作业,直至tig焊枪10的起始点与终点重合,tig熔池14形成整环焊缝15,完成整环焊接。
52.环形焊缝收尾流程,当mig熔池终点与起点相同时候,mig焊枪9退出,过渡焊缝13消失,tig熔池14也消失。
53.本发明提供的一种双机器人焊接工作站,采用mig焊枪和tig焊枪同步工作,mig焊枪的焊丝由电弧熔化,送入焊接区,焊接效率高。进一步采用tig焊,因填充丝不通过电流,不存在熔滴过渡问题,加之电弧在惰性气体中燃烧非常稳定,整个焊接过程中没有飞溅,焊缝成形细腻美观。tig焊接的气密性较好,能降低压力容器焊焊接时焊缝的气孔。
54.基于本发明的设计构思,本发明另一实施例提供的一种焊接方法,包括如上任意实施例中的双机器人焊接工作站,其焊接方法包括如下步骤:
55.带焊接的工件ⅰ4和工件ⅱ5同轴放置于变位机2上,工件ⅰ4和工件ⅱ5之间形成v型坡口11;
56.在v型坡口11上确定mig焊点和tig焊点;具体地,v型坡口11为环形结构,mig焊点
和tig焊点沿工件ⅰ4和工件ⅱ5的转动方向16间隔设置;
57.焊接机器人ⅱ8带动mig焊枪9在mig焊点位置对v型坡口11进行mig焊,形成mig熔池12;
58.变位机2驱动工件ⅰ4和工件ⅱ5同步转动;
59.当mig熔池12转动至tig焊点位置时,焊接机器人ⅰ7带动tig焊枪10在tig焊点位置对mig熔池12进行tig焊,形成tig熔池14,直至完成整环焊缝15。
60.进一步地,mig熔池12到达tig焊点位置时形成半凝固状态的过渡焊缝13。
61.进一步地,焊接机器人ⅰ7和焊接机器人ⅱ8分别位于v型坡口11的两侧;焊接机器人ⅰ7和焊接机器人ⅱ8的位置通过直线运动模组1进行调整。
62.本发明提供的一种焊接方法,首先采用mig焊,焊丝由电弧熔化,送入焊接区,焊接效率高。进一步采用tig焊,因填充丝不通过电流,不存在熔滴过渡问题,加之电弧在惰性气体中燃烧非常稳定,整个焊接过程中没有飞溅,焊缝成形细腻美观。tig焊接的气密性较好,能降低压力容器焊焊接时焊缝的气孔。
63.根据以上基本构型,在tig机器人焊接系统和mig机器人焊接系统中,也可拆除某些常用模块,如拆除tig的外部送丝;或拆除mig的喷嘴,让tig喷嘴喷出两种氩气(一个高纯,一个加1%氧气,双气道改进),让mig熔池12、过渡焊缝13及tig熔池14,三者逼近达到共熔池的新构型。
64.本发明提供的一种双机器人焊接工作站及焊接方法,兼具mig焊接和tig焊接的优点,能满足压力容器的焊接需要,同时提高了工作效率。
65.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。