1.本发明涉及电池技术领域,特别是涉及一种点底焊机构及电池生产线。
背景技术:
2.钢壳电池,是一种外层为钢壳,内部装有电芯的圆柱状电池,钢壳电池在实际生产中涉及到的一道工序是点底焊,点底焊需要将电芯的极耳焊接在钢壳上。
3.然而目前的点底焊工序依靠工人手动完成,需要工人手持焊枪对钢壳电池进行点焊,如此,不但需要投入大量的人力物力,而且,钢壳电池的焊接质量完全取决于工人的经验,导致钢壳电池的点底焊质量存在较大差异,点底焊质量难以保持一致。
技术实现要素:
4.本发明的目的是克服现有技术中的不足之处,提供一种点底焊机构及电池生产线,能够对钢壳电池进行点底焊操作,提高钢壳电池的点底焊效率,同时能够提高点底焊质量。
5.本发明的目的是通过以下技术方案来实现的:
6.一种点底焊机构,包括:
7.基座,所述基座上设置有用于承载钢壳电池的载料治具;
8.顶持组件,所述顶持组件包括滑动设置于所述基座上的顶持块,及设置于所述顶持块上的顶杆,所述顶杆用于抵接钢壳电池;及
9.焊接组件,所述焊接组件包括滑动设置于所述基座上的焊接滑块,及设置于所述焊接滑块上的焊针,且所述焊针与所述顶杆相向设置,所述焊针用于将电芯负极耳焊接至钢壳上。
10.在其中一个实施例中,所述基座包括第一座体及第二座体,所述第一座体与所述第二座体相邻设置,所述顶持块滑动设置于所述第一座体上,所述焊接滑块滑动设置于所述第二座体上。
11.在其中一个实施例中,所述顶持组件还包括夹持块,所述夹持块设置于所述顶持块上,所述夹持块上开设有夹持孔,所述顶杆部分容置于所述夹持孔内。
12.在其中一个实施例中,所述顶持组件还包括滑动设置于所述第一座体上的斜块,所述斜块与所述顶持块连接,所述斜块用于带动所述顶持块在所述第一座体上滑动。
13.在其中一个实施例中,所述斜块开设有两个台阶,所述顶持块上设置有滚轮,所述斜块滑动以靠近或者远离所述顶持块时,以使所述滚轮在两个所述台阶上往复滚动。
14.在其中一个实施例中,所述顶持组件还包括转动设置于所述第一座体上的摆动块,所述摆动块与所述斜块连接,所述摆动块转动时,以带动所述斜块在所述第一座体上滑动。
15.在其中一个实施例中,所述焊接组件还包括设置于所述焊接滑块的焊接气缸,及与所述焊接气缸的输出轴连接的夹紧块,所述焊接气缸用于带动所述夹紧块在所述焊接滑
块上滑动,所述夹紧块上开设有夹紧孔,所述焊针至少部分容置于所述夹紧孔内。
16.在其中一个实施例中,所述点底焊机构还包括风枪,所述风枪相邻所述第二座体设置,所述风枪的枪口与所述焊针相向设置。
17.在其中一个实施例中,所述点底焊机构还包括固定组件,所述固定组件包括固定滑块、缓冲杆及限位块,所述固定滑块滑动设置于所述第一座体上,所述缓冲杆穿设于所述固定滑块,所述限位块设置于所述缓冲杆上,所述固定滑块用于带动所述限位块抵接钢壳电池的外侧壁。
18.一种电池生产线,包括上述中任意一项所述的点底焊机构。
19.与现有技术相比,本发明至少具有以下优点:
20.本发明的点底焊机构及电池生产线,包括基座、顶持组件及焊接组件,基座上设置有用于承载钢壳电池的载料治具,顶持组件包括滑动设置于基座上的顶持块,及设置于顶持块上的顶杆,顶杆用于抵接钢壳电池,焊接组件包括滑动设置于基座上的焊接滑块,及设置于焊接滑块上的焊针,且焊针与顶杆相向设置,焊针用于将电芯负极耳焊接至钢壳上,相对于传统的人工手动焊接,能够提高钢壳电池的点底焊效率,同时由于焊接步骤能够保持一致,因此能够提高点底焊质量。
附图说明
21.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
22.图1为本发明的一实施方式的点底焊机构的结构示意图;
23.图2为图1所示的点底焊机构的部分结构示意图;
24.图3为图1所示的点底焊机构的另一角度的局部结构示意图;
25.图4为本发明的一实施方式的斜块的结构示意图。
具体实施方式
26.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
27.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
28.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
29.需要说明的是,本文所使用关于元件与另一个元件“连接”的相关表述,也表示元件与另一个元件“连通”,流体可以在两者之间进行交换连通。
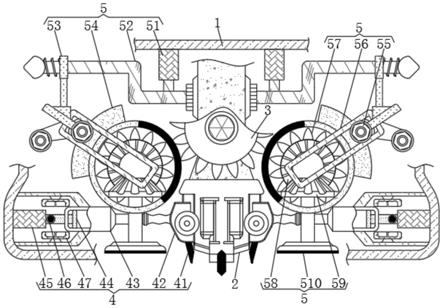
30.请参阅图1及图2,一种点底焊机构2000,包括基座2100、顶持组件2200及焊接组件2300,基座2100上设置有用于承载钢壳电池的载料治具2400,顶持组件2200包括滑动设置于基座2100上的顶持块2210,及设置于顶持块2210上的顶杆2220,顶杆2220用于抵接钢壳电池的底部,焊接组件2300包括滑动设置于基座2100上的焊接滑块2310,及设置于焊接滑块2310上的焊针2320,且焊针2320与顶杆2220相向设置,焊针2320用于将电芯极耳焊接至钢壳上。
31.需要说明的是,基座2100上安装有载料治具2400,其中,载料治具2400可以固定安装在基座2100上,也可以滑动安装在基座2100上;进一步地,顶持块2210滑动设置在基座2100上,例如顶持块2210在基座2100上作升降滑动,为了提高顶持块2210在基座2100上的稳定性,可以在基座2100上安装有滑轨,然后顶持块2210在滑轨上滑动;进一步地,在顶持块2210上安装有顶杆2220,其中,该顶杆2220沿着与重力方向相反的方向设置,而且,顶杆2220位于载料治具2400的下方,顶持块2210能够带动顶杆2220在基座2100上作升降滑动,从而能够在上升时抵接放置在载料治具2400上的钢壳电池;进一步地,焊接滑块2310滑动设置在基座2100上,例如,焊接滑块2310也是在滑轨上滑动,使得滑动时更加稳定,然后在焊接滑块2310上安装有焊针2320,其中,焊针2320与顶杆2220相向设置,并且焊针2320位于载料治具2400的上方,焊接滑块2310能够带动焊针2320下降以对放置在载料治具2400上的钢壳电池进行点底焊操作,如此,相对于传统的人工手动焊接,能够提高钢壳电池的点底焊效率,同时由于焊接步骤能够保持一致,因此能够提高整体点底焊质量。
32.请再次参阅图1,一实施方式中,基座2100包括第一座体2110及第二座体2120,第一座体2110与第二座体2120相邻设置,顶持块2210滑动设置于第一座体2110上,焊接滑块2310滑动设置于第二座体2120上。
33.需要说明的是,基座2100由第一座体2110及第二座体2120组成,其中第一座体2110与第二座体2120相邻设置,第一座体2110与第二座体2120之间设置有间隔,其中,顶持块2210在第一座体2110上进行滑动,而焊接滑块2310则在第二座体2120上滑动,需要注意的是,将顶持块2210与焊接滑块2310分开安装,从而有利于将载料治具2400安装在第一座体2110及第二座体2120之间。
34.请再次参阅图1及图2,一实施方式中,顶持组件2200还包括夹持块2230,夹持块2230设置于顶持块2210上,夹持块2230上开设有夹持孔,顶杆2220部分容置于夹持孔内。
35.需要说明的是,夹持块2230固定安装在顶持块2210上,然后再将顶杆2220安装在夹持块2230上,例如,为了便于更换顶杆2220,能够快速拆装顶杆2220,通过在夹持块2230上开设夹持孔,然后将顶杆2220的部分容置在夹持孔内,而夹持块2230上安装有紧固用的把手,通过旋动把手能够实现将顶杆2220快速安装在夹持孔内,或者从夹持孔内拆卸。
36.请参阅图1及图3,一实施方式中,顶持组件2200还包括滑动设置于第一座体2110上的斜块2240,斜块2240与顶持块2210连接,斜块2240用于带动顶持块2210在第一座体2110上滑动。
37.需要说明的是,斜块2240在第一座体2110上滑动,而且斜块2240与顶持块2210连接,当斜块2240滑动时,能够带动顶持块2210在第一座体2110上滑动,需要注意的是,顶持
块2210在第一座体2110上是升降滑动,而斜块2240在第一座体2110上是水平滑动,如此,通过变换滑动方向,能够使得结构可以更加紧凑。
38.请参阅图3及图4,一实施方式中,斜块2240开设有两个台阶2241,顶持块2210上设置有滚轮2250,斜块2240滑动以靠近或者远离顶持块2210时,以使滚轮2250在两个台阶2241上往复滚动。
39.需要说明的是,为了将斜块2240的滑动方向与顶持块2210的滑动方向相配合好,在斜块2240上开设有两个台阶2241,其中,两个台阶2241之间还开设有斜坡2242,而滚轮2250则能够在两个台阶2241上滚动,进一步地,两个台阶2241之间设置有高度差,因此,当滚轮2250沿着两个台阶2241滚动时,能够带动顶持块2210在第一座体2110上作升降运动,而设置的斜坡2242,能够使得滚轮2250可以更好地在两个台阶2241之间往复运动。
40.请再次参阅图1及图3,一实施方式中,顶持组件2200还包括转动设置于第一座体2110上的摆动块2260,摆动块2260与斜块2240连接,摆动块2260转动时,以带动斜块2240在第一座体2110上滑动。
41.需要说明的是,顶持块2210由斜块2240带动以在第一座体2110上滑动,而为了让斜块2240在第一座体2110上滑动,通过摆动块2260来进行驱动,具体地,摆动块2260转动安装在第一座体2110上,例如,摆动块2260利用轴承安装在第一座体2110上,然后摆动块2260的一端与斜块2240连接,而摆动块2260的另一端则与气缸等驱动源连接,进一步地,摆动块2260也可以由电机驱动的凸轮进行驱动,通过带动摆动块2260转动,能够带动斜块2240在第一座体2110上滑动。
42.请再次参阅图1,一实施方式中,焊接组件2300还包括设置于焊接滑块2310的焊接气缸2330,及与焊接气缸2330的输出轴连接的夹紧块2340,焊接气缸2330用于带动夹紧块2340在焊接滑块2310上滑动,夹紧块2340上开设有夹紧孔,焊针2320至少部分容置于夹紧孔内。
43.需要说明的是,焊接气缸2330固定安装在焊接滑块2310上,再在焊接滑块2310上滑动安装夹紧块2340,然后夹紧块2340还与焊接气缸2330的输出轴连接,焊接气缸2330能够带动夹紧块2340在焊接滑块2310上滑动,而焊针2320安装在夹紧块2340上,而为了便于焊针2320拆装,在夹紧块2340上开设有夹紧孔,然后焊针2320部分容置在夹紧孔内,进一步地,夹紧块2340上也安装有把手,利用该把手能够让焊针2320可以快速地进行拆装;需要主要的是,在自然状态下,焊接气缸2330带动夹紧块2340下降,因此焊接滑块2310升降时,便能够带动焊针2320对钢壳电池进行点底焊操作,而当钢壳电池因位置放置不准确时,焊接气缸2330带动夹紧块2340上升,如此,焊针2320便无法对钢壳电池点底焊,如此,能够防止对放置位置不正确,或者不良钢壳电池进行点焊,有效避免错误焊接。
44.请再次参阅图1,一实施方式中,点底焊机构2000还包括风枪2500,风枪2500相邻第二座体2120设置,风枪2500的枪口与焊针2320相向设置。
45.需要说明的是,由于焊针2320在焊接时会产生高温,因此设置风枪2500,使得风枪2500的枪口朝向焊针2320设置,如此,利用风枪2500吹风对焊针2320进行降温,能够提高焊针2320的降温速度;需要注意的是,风枪2500的枪口能够根据需要调整为任意朝向。
46.请再次参阅图1及图2,一实施方式中,点底焊机构2000还包括固定组件2600,固定组件2600包括固定滑块2610、缓冲杆2620及限位块2630,固定滑块2610滑动设置于第一座
体2110上,缓冲杆2620穿设于固定滑块2610,限位块2630设置于缓冲杆2620上,固定滑块2610用于带动限位块2630抵接钢壳电池的外侧壁。
47.需要说明的是,固定滑块2610在第一座体2110上滑动,例如在第一座体2110上安装滑轨,固定滑块2610在滑轨上滑动,如此,能够提高固定滑块2610的稳定性;进一步地,缓冲杆2620穿设于固定滑块2610,因此缓冲杆2620能够在固定滑块2610上穿设运动,进一步地,在缓冲杆2620的一端上固定安装限位块2630,如此,缓冲杆2620穿设运动时,限位块2630能够相对于固定滑块2610滑动;下面对固定组件2600的工作原理进行说明,当固定滑块2610在第一座体2110滑动以靠近载料治具2400时,会带动限位块2630抵接在钢壳电池的外侧壁上,而由于限位块2630与固定滑块2610之间能够滑动,意味着限位块2630具有一定的缓冲能力,因此,限位块2630抵接钢壳电池进行固定时能够更稳定。
48.请再次参阅图2,一实施方式中,限位块2630上开设有v型槽2631,限位块2630抵接于钢壳电池时,v型槽2631的内侧壁与钢壳电池的外侧壁相抵接,如此,能够提高钢壳电池的稳定性。
49.请再次参阅图1及图2,一实施方式中,固定组件2600还包括缓冲弹簧2640,缓冲弹簧2640套在缓冲杆2620上,缓冲弹簧2640用于推顶限位块2630,以使限位块2630具有远离固定滑块2610的趋势,如此,利用缓冲弹簧2640的弹性力,使得限位块2630相对于固定滑块2610滑动时具有更好的缓冲能力,从而更好地固定钢壳电池。
50.请再次参阅图1及图2,一实施方式中,固定组件2600还包括摆板2650,摆板2650转动设置于第一座体2110上,且摆板2650与固定滑块2610连接,摆板2650转动时,以带动固定滑块2610在第一座体2110上滑动。
51.需要说明的是,为了让摆板2650可以更好地带动固定滑块2610滑动,在摆板2650上也安装有滚动轮2660,该滚动轮2660可以在固定滑块2610上滚动,如此,便能够将摆板2650的旋转运动转换为固定滑块2610的直线运动;进一步地,摆板2650的另一端可以由气缸驱动,也可以由电机驱动的凸轮进行驱动。
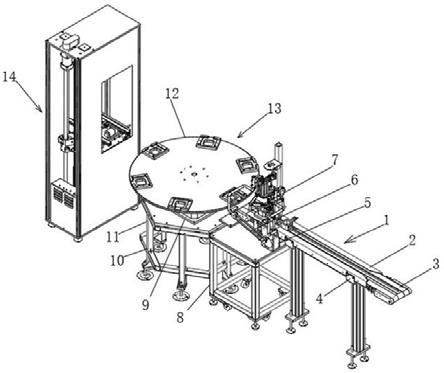
52.一种电池生产线,包括上述中任意一项的点底焊机构2000,如此,在电池生产线中设置本技术的点底焊机构2000,能够自动对钢壳电池进行点底焊操作,如此,相对于传统的人工手动焊接,能够提高钢壳电池的点底焊效率,同时由于焊接步骤能够保持一致,因此能够提高点底焊质量。
53.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。