1.本发明涉及代步车技术领域,更具体地说,涉及一种用于盲人出行的自动避障系统及其代步车。
背景技术:
2.随着近年来我国代步车产业的发展,智能代步车的种类和功能越来越丰富,为盲人、老年人等大量行动不便者的日常出行带来了便利。相对于其他行动不便者,盲人在出行时由于无法看到周围的环境,需要代步车具备精确导航和实时反应的能力来为盲人出行提供辅助。
3.由于轮椅产业的快速发展,城市中的人行道设施也相应升级,越来越多的人行道设置出入口坡道。但在某些人行道上,为防止部分汽车占用步道停放,在出入口坡道上设置立柱,由于盲人无法看见代步车前进方向上的障碍物体,导致其进出步道容易出现撞伤的情况,安全性不足。
4.现有的代步车大多是通过雷达感应前进方向预设距离范围内存在的障碍物,并反馈至用户,但用户得知障碍物后,需要缓慢前行摸索障碍物的具体位置,导致用户进出步道困难,需要耗费大量时间摸索并避开障碍物,使用不方便。
技术实现要素:
5.本发明要解决的技术问题在于现有的代步车出入步道困难、安全性低等缺点,针对现有技术的上述缺陷,提供一种用于盲人出行的自动避障系统及其代步车。
6.本发明解决其技术问题所采用的技术方案是:构造一种用于盲人出行的自动避障系统,包括:
7.感应组件,用于感应前进过程中是否存在障碍物;
8.图像获取组件,用于在所述感应组件感应到障碍物时获取前方图像;
9.距离识别组件,用于识别所述图像中各障碍物的间距;
10.控制组件,用于接收输入数据和输出控制指令;
11.方向调整组件,用于控制代步车减速与调整方向;
12.所述感应组件的输出端与所述控制组件的输入端通信连接;所述图像获取组件与所述距离识别组件分别与所述控制组件通信连接;所述控制组件的输出端与所述方向调整组件的输入端通信连接。
13.进一步地,所述感应组件包括信号生成单元;所述信号生成单元与所述图像获取组件通信连接。
14.进一步地,所述信号生成单元为激光雷达。
15.进一步地,所述图像获取组件包括图像摄取单元与图像发送单元;所述控制组件包括存储单元;所述信号生成单元的输出端与所述图像摄取单元的输入端通信连接;所述图像摄取单元的输出端与所述图像发送单元的输入端通信连接;所述图像发送单元的输出
端与所述存储单元的输入端通信连接。
16.进一步地,所述距离识别组件包括图像合成单元;所述图像合成单元中设有尺寸板;所述尺寸板上设有若干正方格;所述图像合成单元的输入端与所述存储单元的输出端通信连接。
17.进一步地,所述距离识别组件包括分析单元;所述分析单元的输入端与所述图像合成单元的输出端通信连接。
18.进一步地,所述正方格的尺寸为1cm*1cm。
19.进一步地,所述控制组件包括处理单元;所述处理单元的输入端与所述分析单元的输出端通信连接。
20.进一步地,所述方向调整组件包括减速单元与调整单元;所述处理单元的输出端分别与所述减速单元的输入端与所述调整单元的输入端通信连接。
21.本技术提供一种用于盲人出行的代步车,包括车体;还包括如前述中任一项所述的自动避障系统。
22.本发明的有益效果在于:通过感应组件探测代步车前进,在感应组件感应到前方存在障碍物时,由图像获取组件获取前方图像,并由距离识别组件将图像合成并识别图像中各障碍物的间距,由控制组件根据间距与代步车自身宽度进行对比,并根据对比结果输出指令控制代步车减速与调整方向,智能控制代步车进出人行步道,自动调整代步车前进方向,使得用户能够快捷地进出人行步道,避免用户碰撞石柱而受伤,安全性高。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图及实施例对本发明作进一步说明,下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
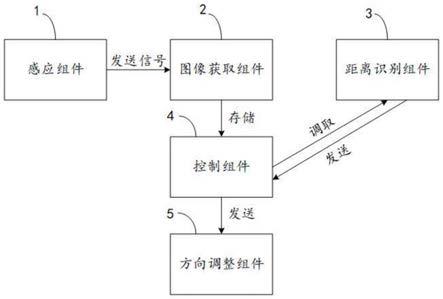
24.图1为本发明实施例的一种用于盲人出行的自动避障系统的结构框图;
25.图2为本发明实施例的一种用于盲人出行的自动避障系统的流程框图;
26.图3为本发明实施例的尺寸板与图像合成的示意图。
27.图中,1、感应组件;2、图像获取组件;3、距离识别组件;4、控制组件;5、方向调整组件;11、信号生成单元;21、图像摄取单元;22、图像发送单元;31、图像合成单元;32、尺寸板;33、分析单元;41、存储单元;42、处理单元;51、减速单元;52、调整单元。
具体实施方式
28.为了使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的部分实施例,而不是全部实施例。基于本发明的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
29.本发明较佳实施例的如图1至图3所示,提供一种用于盲人出行的自动避障系统,包括:
30.感应组件1,用于感应前进过程中是否存在障碍物;
31.图像获取组件2,用于在感应组件1感应到障碍物时获取前方图像;
32.距离识别组件3,用于识别图像中各障碍物的间距;
33.控制组件4,用于接收输入数据和输出控制指令;
34.方向调整组件5,用于控制代步车减速与调整方向;
35.感应组件1的输出端与控制组件4的输入端通信连接;图像获取组件2与距离识别组件3分别与控制组件4通信连接;控制组件4的输出端与方向调整组件5的输入端通信连接。
36.通过感应组件1探测代步车前进,在感应组件1感应到前方存在障碍物时,由图像获取组件2获取前方图像,并由距离识别组件3将图像合成并识别图像中各障碍物的间距,由控制组件4根据间距与代步车自身宽度进行对比,并根据对比结果输出指令控制代步车减速与调整方向,智能控制代步车进出人行步道,自动调整代步车前进方向,使得用户能够快捷地进出人行步道,避免用户碰撞石柱而受伤,安全性高。
37.在进一步的实施例中,感应组件1包括信号生成单元11;信号生成单元11与图像获取组件2通信连接。信号生成单元11探测代步车前进方向是否存在障碍物,若存在障碍物,则发送信号至图像获取组件2中,若不存在障碍物,则不发生信号,代步车继续前进。
38.在进一步的实施例中,信号生成单元11为激光雷达。采用激光雷达,分辨率更高,抗干扰能力强,探测性能更好。其中,激光雷达探测的距离为代步车前方3m范围内,且其探测面的宽度大于代步车的宽度,优选的,大于代步车宽度2
‑
3cm。
39.在进一步的实施例中,图像获取组件2包括图像摄取单元21与图像发送单元22;控制组件4包括存储单元41;信号生成单元11的输出端与图像摄取单元21的输入端通信连接;图像摄取单元21的输出端与图像发送单元22的输入端通信连接;图像发送单元22的输出端与存储单元41的输入端通信连接。
40.信号生成单元11探测到前方存在障碍物,会发出信号至图像摄取单元21,图像摄取单元21摄取前方图像后,输送给图像发送单元22,图像发送单元22将图像发送到存储单元41上进行存储,等待下一步骤使用。
41.在进一步的实施例中,距离识别组件3包括图像合成单元31;图像合成单元31中设有尺寸板32;尺寸板32上设有若干正方格;图像合成单元31的输入端与存储单元41的输出端通信连接。优选地,正方格的尺寸为1cm*1cm。
42.进一步地,距离识别组件3包括分析单元33;分析单元33的输入端与图像合成单元31的输出端通信连接。
43.图像合成单元31从存储单元41中调用刚刚拍摄的前方图像,并在图像与尺寸板32重合,其中,图像与尺寸板32的尺寸一一对应,图像内各障碍物的间距为实际间距。一个正方格的长度或宽度代表一个尺寸。例如,两个石柱之间具有40个正方格,则两个石柱之间的间距为40cm;两个石柱之间具有38个正方格,则两个石柱之间的间距为38cm。尺寸板32的尺寸排列由中间向两侧或两端递增。
44.具体地,图像合成分析过程为:分析单元33先读取空白的尺寸板32,图像合成单元31从存储单元41中调取摄取的图像,并将图像与尺寸板32分别作为两个图层进行叠加合成,其中图像置顶于尺寸板32前方,分析单元33识别合成图像内的石柱,计算图像内石柱周围水平方向上的空白格数量,进而计算得出石柱左右两侧的空间宽度。
45.上述实施例中,正方格的尺寸为1cm*1cm,将识别距离精确到1cm内,能够更加精确
地避开前进过程中的障碍物。
46.在进一步的实施例中,控制组件4包括处理单元42;处理单元42的输入端与分析单元33的输出端通信连接。
47.优选地,方向调整组件5包括减速单元51与调整单元52;处理单元42的输出端分别与减速单元51的输入端与调整单元52的输入端通信连接。
48.处理单元42接收分析单元33的数据后,与预先设置的代步车宽度进行对比,图像摄取单元21处于尺寸板32的中点,代步车的宽度为中点对称向两边递增,处理单元42将障碍物周围的空白正方格与代步车宽度进行对比,寻找能够大于代步车宽度的空白格区域,并输出减速指令至减速单元51,使代步车减速,输出方向调整指令至调整单元52。例如,左侧石柱靠近中点,需要向右移才能通过两石柱之间,则通过向右移动,使得代步车能够从两个石柱之间的间距通过。
49.本技术提供一种用于盲人出行的代步车,包括车体;还包括如前述中任一项所述的自动避障系统。其中,激光雷达设置在车体前端,图像摄取单元21设置在车体前端正中间部位,图像摄取单元21的图像为代步车正前方图像,图像内容为正前方竖直平面图像。图像与图像摄取单元21的光轴垂直。通过激光雷达感应车体前方1
‑
3m内的障碍物,并在存在障碍物时控制图像摄取单元21拍摄前方图像,并由图像合成单元31将图像与尺寸板32合成,分析单元33分析图像中障碍物水平方向上的空白正方格数量(即宽度),由处理单元42分析处理后,输出减速指令与方向调整指令,智能自动进出人行步道,自动调整代步车前进方向,使得用户能够快捷地进出人行步道,避免用户碰撞石柱而受伤,安全性高。
50.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。