1.本发明涉及新能源发电技术领域,特别是一种光伏发电单元的灵活功率跟踪控制方法及其应用。
背景技术:
2.随着城市人口的不断增加,地铁成为了人们生活中不可或缺的交通工具。同时,随着轨道交通运营总里程的快速增长,地铁的耗电量巨大,能源枯竭与环境污染问题随之出现。因此,新能源逐渐走进了大众的视野。其中,清洁、取用方便的太阳能在众多新能源中脱颖而出。近年来,新能源应用于城市轨道交通的研究备受关注。地铁牵引供电系统采用光伏发电不仅可以解决一部分供电问题,还有助于光伏电能的消纳。在光伏发电单元的应用中,当前的研究热点主要是通过最大功率点跟踪(maximum power point tracking,mppt)算法使光伏阵列输出最大功率,提高光伏发电系统的能量利用率。但在太阳能资源丰富的地区,光伏发电系统可能存在发电量过剩的情况,影响负载的正常工作。
3.当光伏发电单元应用于地铁牵引供电系统时,光伏阵列的输出特性容易受温度、光照强度的影响,同时,地铁相邻车站的间距短,机车启、制动频繁。因此,光伏阵列的输出特性与牵引负荷的特性往往会导致接触网的母线电压剧烈波动。当光伏阵列的最大输出功率低于机车的牵引功率时,母线电压下降。当母线电压低于相应的参考下限值,地铁牵引供电系统的其它供电单元将提供机车牵引过程中多于光伏发电部分的电能,维持母线电压高于参考下限值。光伏阵列的最大输出功率高于机车的牵引功率与机车制动过程均能导致接触网的母线电压上升,甚至造成接触网的直流母线过电压。因此,采取措施限制接触网的母线电压在安全范围内是有必要的。在地铁牵引供电系统中,传统的能量消耗方式是采用制动电阻消耗多余的电能,平衡光伏发电系统与机车之间的功率差,避免直流母线电压超过安全范围。但采用制动电阻消耗电能会使地铁牵引供电系统的温度上升,散热装置的使用造成成本增加。
技术实现要素:
4.本发明的目的是提供一种光伏发电单元的灵活功率跟踪控制方法及其应用。
5.实现本发明目的的技术方案如下:
6.一种光伏发电单元的灵活功率跟踪控制方法,所述光伏发电单元通过dc
‑
dc变换器连接到直流母线,负载连接到直流母线;包括:
7.步骤1:求取光伏发电单元的参考功率p
ref
与输出功率p
pv
的误差绝对值后,再与比例系数k相乘,得到电压步长v
step
;
8.步骤2:如光伏发电单元的参考功率p
ref
大于输出功率p
pv
,则进入mppt模式,否则进入恒定功率跟踪模式;
9.所述mppt模式利用扰动观察法实现:
10.若p
pv
大于p
pv_old
且v
pv
小于或等于v
pv_old
,则更新参考电压v
ref
为v
ref_old
–
v
step
;
11.若p
pv
大于p
pv_old
且v
pv
大于v
pv_old
,则更新参考电压v
ref
为v
ref_old
v
step
;
12.若p
pv
小于或等于p
pv_old
且v
pv
小于或等于v
pv_old
,则更新参考电压v
ref
为v
ref_old
v
step
;
13.若p
pv
小于或等于p
pv_old
且v
pv
大于v
pv_old
,则更新参考电压v
ref
为v
ref_old
–
v
step
;
14.所述恒定功率跟踪模式为:更新参考电压v
ref
为v
ref_old
–
v
step
;
15.其中,p
pv_old
为上一次扰动所得的参考功率,v
pv
为当前输出电压,v
pv_old
为上一次扰动所得的输出电压,v
ref_old
为上一次扰动所得的参考电压;
16.步骤3:将更新后的参考电压v
ref
和当前输出电压v
pv
,通过pid和pwm后得到的信号,控制dc
‑
dc变换器。
17.上述控制方法的另一种应用为,还包括分别连接到直流母线的牵引供电装置和制动电阻装置;所述制动电阻装置采用电压闭环控制法,控制直流母线电压;所述负载为通过dc
‑
ac变换器连接到直流母线的机车。
18.上述控制方法的一种应用为,还包括分别连接到直流母线的牵引供电装置和超级电容储能装置;所述超级电容储能装置采用双闭环控制法,控制直流母线电压;所述负载为通过dc
‑
ac变换器连接到直流母线的机车。
19.上述控制方法的再一种应用为,还包括连接到直流母线的超级电容储能装置;所述超级电容储能装置采用双闭环控制法,控制直流母线电压。
20.与现有技术相比,本发明的有益效果是:
21.一、本发明的扰动步长由参考功率与光伏阵列输出功率之间的误差决定,使得光伏阵列的输出功率能够快速跟随参考功率的变化,适用于光照强度、负载功率不断变化的场合。本发明将恒定功率跟踪模式的工作点限制在最大功率点的左侧,保证光伏阵列在光照强度波动的情况下能够正常工作。
22.二、与现有光伏接入地铁牵引供电系统的控制方法相比,本发明既减少了传统能源的浪费与系统的散热装置的使用,降低成本,又可以减小系统的其它稳压装置的容量,延长其它稳压装置的寿命。
23.三、与现有光伏接入地铁牵引供电系统的控制方法相比,采用本发明可以实时控制光伏阵列的输出以实现接触网的母线电压的稳定,省去了现有控制方法中工况模式的划分及其相互转换的复杂过程。
附图说明
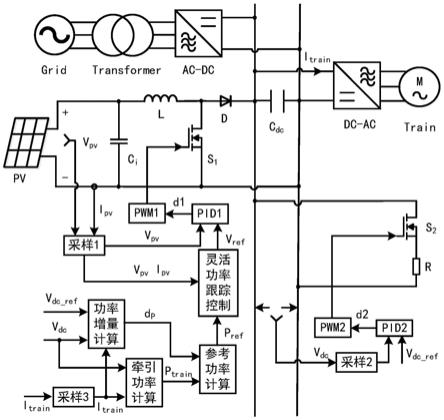
24.图1为实施例一的电路拓扑结构及控制方法示意图。
25.图2为实施例一中功率增量计算原理示意图。
26.图3为实施例一中牵引功率计算原理示意图。
27.图4为实施例一中参考功率计算原理示意图。
28.图5为本发明灵活功率跟踪控制方法的流程图。
29.图6为实施例一中机车运行过程中的功率曲线图。在该功率为正时,该功率为机车的牵引功率;在该功率为负时,该功率为机车的制动功率。
30.图7a、图7b、图7c和图7d为现有光伏接入地铁牵引供电系统的控制方法实现机车运行过程中接触网的母线电压、光伏阵列输出功率、电网输出功率与制动电阻消耗功率的
仿真波形图。
31.图8a、图8b、图8c和图8d为光伏接入地铁牵引供电系统的灵活功率跟踪控制方法实现机车运行过程中接触网的母线电压、光伏阵列输出功率、电网输出功率与制动电阻消耗功率的仿真波形图。
32.图7、图8的仿真条件如下:高压电网为110kv三相交流电,频率为50hz,直流母线电容c
dc
为9600μf。光伏阵列由13
×
30个光伏电池串并联组成,最大输出功率为105241.5w。其中,光伏电池的最大功率为269.85w,最大功率点处对应的输出电压为44.5v。电感l为200μh,输入电容c
i
为1000μf,开关频率为100khz。图7的最大功率跟踪控制的采样周期与图8中的灵活功率跟踪控制的采样周期均为0.05ms。
33.图9为实施例二的电路拓扑结构及控制方法示意图。
34.图10为实施例三的电路拓扑结构及控制方法示意图。
具体实施方式
35.随着光伏装机容量增加,光伏发电单元在维持地铁牵引系统的稳定性中存在至关重要的作用。现有的光伏发电系统的单一mppt算法不能维持接触网的母线电压平衡,而需要根据机车的工况实时控制光伏阵列的输出,以调节接触网的母线电压。在光伏阵列发出的电能低于负载需求时,调节光伏阵列的输出功率增加;在光伏阵列发出的电能高于负载的需求时,调节光伏阵列的输出功率降低至负载需求功率,制动电阻仅用于机车制动过程,减少热量的产生与散热装置的使用。基于此,本发明提供了一种光伏发电单元的灵活功率跟踪控制方法及其应用,实现接触网的直流母线电压的稳定控制。
36.下面结合具体实施例对本发明进一步说明。
37.实施例一
38.如图1,具体做法是:
39.步骤1:初始化参数。具体包括设置:直流母线电压的上下限、直流母线的参考电压、灵活功率跟踪的采样周期、光伏阵列的初始参考电压等参数。
40.步骤2:计算光伏发电的功率参考值。首先,采集直流母线电压,计算母线电压与相应参考值的差值,结合电压差值与机车的输入电流计算功率增量。然后,通过母线电压与机车的输入电流计算机车的牵引功率。最后,结合功率增量与机车牵引功率计算得到牵引供电系统需要提供的功率,作为光伏发电的功率参考值。
41.步骤3:灵活功率跟踪控制调节光伏阵列的输出。首先,系统采集光伏阵列的输出电压和输出电流并计算光伏阵列的输出功率。然后,利用参考功率与光伏阵列输出功率之间的误差绝对值与比例系数相乘得到电压步长。判断光伏阵列输出功率与参考功率的大小并选择不同的工作模式。若参考功率大于光伏阵列的输出功率则进入最大功率点跟踪(maximum power point tracking,mppt)模式,反之进入恒定功率跟踪模式。其中,mppt模式利用扰动观察法实现,根据扰动前后功率差值、电压差值的正负与电压步长更新参考电压。恒定功率跟踪模式则根据电压步长减小参考电压。最后,系统根据光伏阵列的输出电压与参考电压输出周期性的脉冲,控制光伏阵列的输出功率稳定于参考功率,以调节接触网的母线电压稳定。
42.步骤4:判断稳压。采集直流母线电压,并判断其是否大于直流母线的上限值,若大
于则进入步骤5,否则进入步骤6。
43.步骤5:电压闭环控制制动电阻稳定母线电压。将直流母线电压和相应的参考电压通过pid(proportion integration differentiation,比例
‑
积分
‑
微分控制)和pwm(pulse width modulation,脉冲宽度调制)后得到周期性的脉冲,控制制动电阻参与工作,以调节接触网的母线电压稳定至母线电压的上限值,返回步骤2。
44.步骤6:判断稳压。判断直流母线电压是否小于直流母线的下限值,若小于则进入步骤7,否则返回步骤2。
45.步骤7:电网输出能量稳定母线电压。电网部分的ac
‑
dc装置主动参与工作,以调节接触网的母线电压稳定至直流母线电压的下限值,返回步骤2。
46.本例采用以下的装置,可使上述控制方法得以方便快捷地实现:光伏接入地铁牵引供电系统的控制方法的实现装置,由dc
‑
dc变换器、斩波器、制动电阻和控制器组成。其中,dc
‑
dc变换器输入端连接光伏阵列、输出端连接接触网的直流母线。斩波器和制动电阻构成制动电阻装置,与接触网的直流母线连接。控制器包括三个采样模块、牵引功率计算模块、功率增量计算模块、参考功率计算模块、灵活功率跟踪控制模块、pid模块与pwm模块。
47.该装置的工作过程和原理是:采样模块2与采样模块3分别采集直流母线电压v
dc
、机车的输入电流i
train
并输入到功率增量计算模块与牵引功率计算模块。功率增量计算模块首先计算母线电压v
dc
与母线电压参考值v
ref
之间的差值,然后将计算所得到的差值与机车的输入电流i
train
相乘,得到功率增量d
p
。牵引功率计算模块利用功率与电压、电流的关系计算得到机车的牵引功率p
train
。参考功率计算模块结合功率增量模块的输出d
p
与机车的工况p
train
得到光伏阵列的参考功率p
ref
。将光伏阵列的参考功率p
ref
与采样模块1采集到的光伏阵列的输出电流i
pv
和输出电压v
pv
共同输入灵活功率跟踪控制模块。灵活功率跟踪控制模块输出光伏阵列的参考电压v
ref
,与光伏阵列的输出电压v
pv
共同输入pid1模块。pid1模块通过比例、积分等环节,得到占空比并输入到pwm1模块。pwm1模块输出周期性的脉冲波形,控制dc
‑
dc变换器。同时,将采样所得的直流母线电压v
dc
与其参考电压v
dc_ref
共同输入pid2模块,pid2模块通过比例、积分等环节,得到占空比并输入到pwm2模块。pwm2模块输出周期性的脉冲波形,控制斩波器。
48.图2示出本例的功率增量计算工作过程中将光伏阵列的参考电压v
ref
与接触网的母线电压v
dc
做差,差值与机车的输入电流i
train
相乘,得到功率增量d
p
。
49.图3示出本例的牵引功率计算工作过程中将母线电压v
dc
与机车的输入电流i
train
的相乘,得到机车的牵引功率p
train
。
50.图4示出本例的参考功率计算工作过程中根据功率增量d
p
和机车的牵引功率p
train
得到光伏阵列的输出功率参考值p
ref
。
51.图5示出灵活功率跟踪控制的流程图。首先初始化比例系数k与光伏阵列的初始参考电压v
ref_old
,利用光伏阵列的输出电流i
pv
和光伏阵列的输出电压v
pv
计算光伏阵列的输出功率p
pv
。其中,比例系数k与初始参考电压v
ref_old
均由经验值选取。通过光伏阵列的参考功率p
ref
与p
pv
的误差绝对值与比例系数k相乘计算得到电压步长v
step
。然后,通过比较光伏阵列的参考功率p
ref
与p
pv
的大小判断光伏阵列的工作模式。若p
ref
大于p
pv
,进入mppt模式。mppt模式利用扰动观察法实现,即分别比较当前光伏阵列的输出参数p
pv
、v
pv
与上一次扰动所得的输出参数p
pv_old
、v
pv_old
的大小。在mppt模式中,若p
pv
大于p
pv_old
,且v
pv
小于或等于
v
pv_old
,则更新参考电压v
ref
为v
ref_old
–
v
step
;若p
pv
、v
pv
分别大于p
pv_old
、v
pv_old
,则更新参考电压v
ref
为v
ref_old
v
step
;若p
pv
、v
pv
分别小于或等于p
pv_old
、v
pv_old
,则更新参考电压v
ref
为v
ref_old
v
step
;若p
pv
小于或等于p
pv_old
且v
pv
大于v
pv_old
,则更新参考电压v
ref
为v
ref_old
–
v
step
。若p
ref
小于或等于p
pv
,进入恒定功率跟踪模式。在恒定功率跟踪模式中,更新参考电压v
ref
为v
ref_old
–
v
step
。最后,将更新后的v
ref
赋值给v
ref_old
并输出。在灵活功率跟踪控制中,电压步长v
step
取决于p
ref
与p
pv
的误差绝对值。当p
pv
偏离p
ref
越大时,电压步长变大,参考电压的变化量变大,快速调节光伏阵列运行到目标功率点;当p
pv
偏离p
ref
越小时,电压步长变小,参考电压的变化量变小,避免了固定电压步长较大时可能出现的在目标功率点附近振荡的情况。另外,光伏阵列输出功率的减小可以通过增加或减小参考电压实现,其相应调节光伏阵列工作在最大功率点的两侧。增加参考电压使光伏阵列工作在最大功率点的右侧,而减小参考电压使光伏阵列工作在最大功率点的左侧。最大功率点右侧的工作点容易受光照强度的影响而不稳定,但恒定功率跟踪模式限制光伏阵列工作在最大功率点的左侧,保证光伏阵列在光照强度波动的情况下能够正常工作。
52.图6示出机车运行过程中的牵引或制动功率曲线。在0~0.4s间,机车加速启动;在0.4~0.8s间,机车匀速运行;在0.8~1.2s间,机车减速制动;在1.2~1.4s间,机车停止运行。在0~0.8s期间,机车表现为牵引负荷,吸收由高压电网、光伏阵列等供电单元提供的电能;在0.8~1.2s期间,机车表现为发电单元,向接触网输送电能;在1.2~1.4s期间,机车停止运行,不吸收能量。
53.本例的地铁牵引供电系统由高压电网、变压器、牵引变电所、光伏阵列、dc
‑
dc变换器、机车、制动电阻、斩波器组成。其中,牵引变电所包括整流变压器和整流机组,整流机组采用24脉波整流装置。在地铁牵引系统采用现有控制方法与本发明的控制方法的两种情况下,用matlab/simulink对本发明控制进行仿真,结果如下。
54.图7a、图7b、图7c与图7d为现有光伏接入地铁牵引供电系统的控制方法实现机车运行过程中接触网的母线电压、光伏阵列输出功率、电网输出功率与制动电阻消耗功率的仿真波形图。由仿真波形图可知接触网的母线电压一直保持在安全范围(1000~1800v)内,但母线电压长时间在阈值1800v上下波动。在机车运行过程中,光伏阵列持续稳定地输出最大功率。在机车运行初始阶段,母线电压从0v开始上升,由于母线电压低于1000v,电网提供能量;在0.08~0.2s间,由于光伏阵列的输出功率大于机车所需的牵引功率,造成母线电压上升,制动电阻参与工作;在0.2~0.3s间,母线电压保持在安全范围内,电网、制动电阻不参与工作;在0.3~0.48s间,光伏阵列的最大功率低于机车牵引功率,母线电压下降,电网提供机车所需的剩余的能量;在0.48~0.8s间,光伏阵列的输出功率大于机车的牵引功率,母线电压上升,制动电阻参与工作;在0.8~1.2s间,机车制动,向接触网输出能量,同时,光伏阵列也在向接触网输出功率,母线电压上升,制动电阻参与工作,消耗机车产生的制动功率和光伏阵列的输出功率。在1.2~1.4s间,机车停止,但由于光伏阵列仍保持最大功率输出,接触网电压上升,制动电阻消耗光伏阵列产生的能量。
55.图8a与图8b、图8c、图8d为光伏接入地铁牵引供电系统的灵活功率跟踪控制方法实现机车运行过程中接触网的母线电压、光伏阵列输出功率、电网输出功率与制动电阻消耗功率的仿真波形图。由仿真波形图可知接触网的母线电压一直保持在安全范围内,且母线电压仅在机车制动过程中超过阈值1800v。在机车运行过程中,光伏阵列根据机车的需求
实时控制输出功率。在0~0.2s间,光伏阵列的最大输出功率大于机车的牵引功率,光伏阵列工作在恒定功率跟踪模式,其输出功率跟随机车的牵引功率变化;在0.2~0.4s间,光伏阵列的最大输出功率小于机车的牵引功率,光伏阵列工作在mppt模式,保持最大功率输出,但由于光伏阵列的发电量不能满足机车的需求,导致母线电压下降,为使母线电压不低于1000v,电网提供机车所需的剩余牵引功率;在0.4~0.8s间,光伏阵列的最大输出功率大于机车的牵引功率,光伏阵列工作在恒定功率跟踪模式,电网不提供电能;在0.8~1.2s间,机车制动向直流母线方向输出能量,导致母线电压上升,为使母线电压不超过1800v,限制光伏阵列的输出功率为0,机车的制动功率通过制动电阻消耗。在1.2~1.4s间,机车停止,光伏阵列、电网均不提供能量。
56.对比可知,灵活功率跟踪控制方法可以实时控制光伏阵列的输出,调节接触网的母线电压稳定在安全范围内。同时,灵活功率跟踪控制方法减少制动电阻的工作,减少热量的产生与散热装置的使用,降低成本。若平衡机车与光伏发电的功率差的稳压装置由制动电阻替换为储能装置,由于光伏阵列的恒定功率控制,储能装置只需要吸收机车制动能量,而不需要吸收多余的太阳能,可以有效减少储能装置容量;且在机车功率小于光伏阵列的输出功率时,减少了储能装置的循环利用次数,延长储能装置的寿命。
57.实施例二
58.如图9所示,与实施例一不同之处是:本例控制的系统为直流微电网系统。与实施例一相比,本例的系统可应用于供电不方便的偏远无电网地区。本发明除可用于以上实施例中的直流系统,也可用于其他轨道牵引供电系统、交流微电网系统等其他包含光伏发电单元的系统。
59.实施例三
60.如图10所示,与实施例一不同之处是:本例的地铁牵引供电系统由高压电网、变压器、牵引变电所、光伏阵列、dc
‑
dc变换器、机车、超级电容、双向dc
‑
dc变换器组成。其中,超级电容的能量双向流动通过电压内环、电流外环控制双向dc
‑
dc变换器实现。与实施例一相比,本例的系统可以利用超级电容平衡光伏阵列和机车的功率差,在接触网的母线电压降低时,利用超级电容释放能量;在接触网的母线电压上升时,利用超级电容吸收多余能量,减少能量浪费。本发明除可用于以上实施例中的地铁牵引供电系统,也可用于包含电池或超级电容与电池的混合储能装置等的地铁牵引供电系统。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。