3d视觉环境光抑制成像方法
技术领域
1.本发明涉及相机采光成像技术领域,具体为3d视觉环境光抑制成像方法。
背景技术:
2.随着生产生活的日益丰富多彩,人们都喜欢用相机记录一些美好的画面,使得相机逐渐成为人们不可或缺的必需品。相机通常包括外壳和设置在外壳内的镜头以及图像感应模组,图像感应模组包括电路主板以及与电路主板电性连接的图像感应器,被拍摄的景物通过镜头成像于图像感应器,并通过电路板完成信号的数据化,以传输至存储卡保存。
3.例如专利号为cn201720160389.5的专利,公开了一种镜头组件及相机,镜头组件包括镜头、固定调节件、安装件以及设置于所述镜头上的固定件,所述固定调节件包括用于调光的调节部以及连接部,所述连接部背离所述调节部一端与所述固定件连接形成所述镜头的收容空间,所述安装件与所述相机的外壳连接,所述安装件背离与所述相机的外壳连接的一端上设有安装腔,所述调节部安装于所述安装腔内。本发明中,设置所述安装件与相机的外壳连接,以固定调节件,固定调节件设置连接部与镜头上的固定件进行连接,所述镜头通过固定调节件和固定件固定,实现镜头的固定不抖动;镜头组件之间布局紧凑,缩短了镜头的整体长度,减小了镜头组件的整体体积。
4.现有的相机不能够有效抑制环境光,成像方法欠佳,导致不能获得完整的三维点云图,且虽然有些相机配备对镜头的落地缓冲保护机构,但是这些缓冲机构大都侧重保护镜头本体,不能在摔落撞击时对镜头采光口中的滤光镜片进行罩挡保护,造成滤光镜片易被硬物戳破损坏。
技术实现要素:
5.本发明的目的在于提供3d视觉环境光抑制成像方法,以解决上述背景技术中提出不能在摔落撞击时对镜头采光口中的滤光镜片进行罩挡保护,造成滤光镜片易被硬物戳破损坏的问题。
6.为实现上述目的,本发明提供如下技术方案:d视觉环境光抑制成像方法,包括相机;所述相机包括镜头,所述相机的前端中心处设置有一处可伸缩的镜头,此镜头圆周外围的机壳上锁紧安装有一处安装环;安装环;所述安装环包括定位轴,六处定位轴呈环形阵列支撑焊接于安装环上,且六处安装环上通过弹簧顶推滑动套装有一处滑动圈;滑动圈;所述滑动圈包括前凸轴杆和轨道圈,所述滑动圈的圆周内壁上环绕设置有六处前凸轴杆,此六处前凸轴杆的前端段上焊接有一处轨道圈,六处前凸轴杆的最前端焊接固定有一处受力圈,且轨道圈的内部转动安装有一处齿圈。
7.优选的,所述安装环还包括三角顶框,六处所述定位轴中上下对应的两处前端呈左右对向朝安装环的中心处支撑焊接有两处三角顶框。
8.优选的,所述滑动圈还包括插杆,所述轨道圈顶端位置的前侧壁上通过弹簧顶推贯穿插装有一处t形插杆。
9.优选的,所述齿圈包括
10.保持杆,所述齿圈的内侧环形端面上环绕焊接有一圈共六处外凸保持杆;
11.后凸撑杆,呈上下对应的两处保持杆上对称焊接有两处后凸撑杆,此两处后凸撑杆的首端均转动安装有一处导轮。
12.优选的,所述受力圈包括
13.摆杆,所述受力圈的圆周内壁上环绕转动连接有六处摆杆;
14.从动齿轮,六处摆杆尾部转轴的后端套装有一处从动齿轮。
15.优选的,所述受力圈被冲击后滑时两处所述后凸撑杆上的两处导轮对应与两处三角顶框的斜边顶推滚动接触。
16.优选的,一圈共六处所述保持杆对应与轨道圈内部的环形轨道槽转动配合。
17.优选的,一圈共六处所述从动齿轮朝向轨道圈支撑安装,且一圈从动齿轮对应与齿圈啮合接触。
18.优选的,所述t形插杆的底部段呈斜切结构,且t形插杆的底部斜切段对应与齿圈插接配合。
19.优选的,包括以下步骤:
20.1、采用相机1采集被测目标的初步表面图像,处理获得初步三维点云图;
21.2、激光模组投射高分辨率红色条纹结构光编码至被测目标,采用相机1滤去白光以获取对应的红光编码表面图像;
22.3、在0.7秒内进行16次扫描,获取对应的红光编码表面图像;获得相机1 的融合红光表面图像;
23.4、根据融合的红光表面图像获取红光三维点云图;将红光三维点云图与初步三维点云图叠加处理,获得完整的三维点云图。
24.与现有技术相比,本发明的有益效果是:
25.1、本发明当相机不慎掉落触地时,受力圈会套罩支撑保护镜头,避免镜头直接与地面冲击接触,减小镜头被摔坏的机率,且受力圈在受到触地冲击时可通过滑动圈压缩一圈定位轴上的弹簧对冲击力实施缓冲,减小对镜头的冲击振荡;
26.2、本发明通过斜面导向原理,受力圈触地冲击带动齿圈和两处保持杆后滑时可被两处三角顶框的斜面导向驱使扭转,齿圈扭转又会啮合驱使一圈从动齿轮和六处摆杆同步摆转置于受力圈的内部将镜头内部的滤光玻璃片遮挡住,避免滤光玻璃片被硬物戳碎,有效保护了镜头的完整性,且六处摆杆利用触地冲击力触发驱使内摆,具有较好的反应及时性,使六处摆杆在发生摔落事故的一瞬间就能够被触发摆转进行遮挡保护,对应镜头的保护效果较佳;
27.3、本发明通过斜面导向原理,t形插杆的底部斜切段能够对实时插接定位齿圈,使齿圈保持在冲击扭转的状态并使六处摆杆保持在内转遮挡的使用状态;
28.4、本发明的顶端后凸撑杆与其右侧的定位轴之间挂撑设置有一处弹簧,将 t形插杆松脱后,此弹簧可自动将齿圈拽拉回转复位并使六处摆杆回转贴靠于受力圈的内壁上(如图1所示),收缩贴靠状态的六处摆杆能够将受力圈的内部空间空出,避免遮挡妨碍镜头的拍摄视界;
29.5、采用相机采集被测目标的初步表面图像,处理获得初步三维点云图;激光模组
投射高分辨率红色条纹结构光编码至被测目标,采用相机滤去白光以获取对应的红光编码表面图像;在0.7秒内进行16次扫描,获取对应的红光编码表面图像;获得相机的融合红光表面图像;根据融合的红光表面图像获取红光三维点云图;将红光三维点云图与初步三维点云图叠加处理,获得完整的三维点云图。
附图说明
30.图1为本发明结构示意图;
31.图2为本发明安装环拆卸状态示意图;
32.图3为本发明安装环结构示意图;
33.图4为本发明安装环背部结构示意图;
34.图5为本发明滑动圈结构示意图;
35.图6为本发明滑动圈背部结构示意图;
36.图7为本发明齿圈结构示意图;
37.图8为本发明图3中a部分放大结构示意图;
38.图9为本发明图5中b部分放大结构示意图;
39.图10为本发明的成像方法流程图;
40.图中,部件名称与附图编号的对应关系为:
41.1、相机;101、镜头;2、安装环;201、定位轴;202、三角顶框;3、滑动圈;301、前凸轴杆;302、轨道圈;303、插杆;4、齿圈;401、保持杆;402、后凸撑杆;5、受力圈;501、摆杆;502、从动齿轮。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
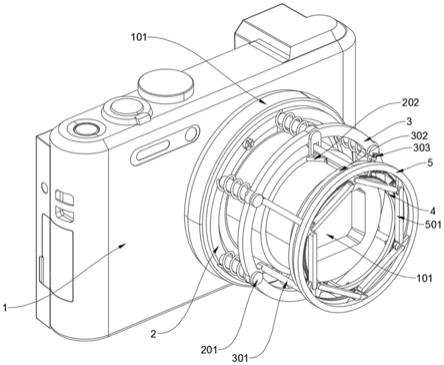
43.请参阅图1至图10,本发明提供的实施例1:3d视觉环境光抑制成像方法,包括相机1;相机1包括镜头101,相机1的前端中心处设置有一处可伸缩的镜头101,此镜头101圆周外围的机壳上锁紧安装有一处安装环2;
44.安装环2;安装环2包括定位轴201,六处定位轴201呈环形阵列支撑焊接于安装环2上,且六处安装环2上通过弹簧顶推滑动套装有一处滑动圈3;
45.滑动圈3;滑动圈3包括前凸轴杆301和轨道圈302,滑动圈3的圆周内壁上环绕设置有六处前凸轴杆301,此六处前凸轴杆301的前端段上焊接有一处轨道圈302,六处前凸轴杆301的最前端焊接固定有一处受力圈5,且轨道圈302 的内部转动安装有一处齿圈4。
46.参照图3,安装环2还包括三角顶框202,六处定位轴201中上下对应的两处前端呈左右对向朝安装环2的中心处支撑焊接有两处三角顶框202,安装环2 用于将滑动圈3与相机1锁紧固定在一起。
47.参照图5,滑动圈3还包括插杆303,轨道圈302顶端位置的前侧壁上通过弹簧顶推贯穿插装有一处t形插杆303。
48.参照图7,齿圈4包括
49.保持杆401,齿圈4的内侧环形端面上环绕焊接有一圈共六处外凸保持杆401;
50.后凸撑杆402,呈上下对应的两处保持杆401上对称焊接有两处后凸撑杆 402,此两处后凸撑杆402的首端均转动安装有一处导轮。
51.参照图3,受力圈5包括
52.摆杆501,受力圈5的圆周内壁上环绕转动连接有六处摆杆501;
53.从动齿轮502,六处摆杆501尾部转轴的后端套装有一处从动齿轮502,当相机1不慎掉落触地时,受力圈5会套罩支撑保护镜头101,避免镜头101直接与地面冲击接触,减小镜头101被摔坏的机率,且受力圈5在受到触地冲击时可通过滑动圈3压缩一圈定位轴201上的弹簧对冲击力实施缓冲,减小对镜头101 的冲击振荡。
54.参照图3,受力圈5被冲击后滑时两处后凸撑杆402上的两处导轮对应与两处三角顶框202的斜边顶推滚动接触,通过斜面导向原理,受力圈5触地冲击带动齿圈4和两处保持杆401后滑时可被两处三角顶框202的斜面导向驱使扭转,齿圈4扭转又会啮合驱使一圈从动齿轮502和六处摆杆501同步摆转置于受力圈 5的内部将镜头101内部的滤光玻璃片遮挡住,避免滤光玻璃片被硬物戳碎,有效保护了镜头101的完整性,且六处摆杆501利用触地冲击力触发驱使内摆,具有较好的反应及时性,使六处摆杆501在发生摔落事故的一瞬间就能够被触发摆转进行遮挡保护,对应镜头101的保护效果较佳。
55.参照图6,一圈共六处保持杆401对应与轨道圈302内部的环形轨道槽转动配合。
56.参照图6,一圈共六处从动齿轮502朝向轨道圈302支撑安装,且一圈从动齿轮502对应与齿圈4啮合接触。
57.参照图5,t形插杆303的底部段呈斜切结构,且t形插杆303的底部斜切段对应与齿圈4插接配合,通过斜面导向原理,t形插杆303的底部斜切段能够对实时插接定位齿圈4,使齿圈4保持在冲击扭转的状态并使六处摆杆501保持在内转遮挡的使用状态。
58.参照图10,包括以下步骤:
59.1、采用相机1采集被测目标的初步表面图像,处理获得初步三维点云图;
60.2、激光模组投射高分辨率红色条纹结构光编码至被测目标,采用相机1滤去白光以获取对应的红光编码表面图像;
61.3、在0.7秒内进行16次扫描,获取对应的红光编码表面图像;获得相机1 的融合红光表面图像;
62.4、根据融合的红光表面图像获取红光三维点云图;将红光三维点云图与初步三维点云图叠加处理,获得完整的三维点云图。
63.参阅图1至图10,本发明提供的实施例2:3d视觉环境光抑制成像方法,包括相机1;相机1包括镜头101,相机1的前端中心处设置有一处可伸缩的镜头101,此镜头101圆周外围的机壳上锁紧安装有一处安装环2;
64.安装环2;安装环2包括定位轴201,六处定位轴201呈环形阵列支撑焊接于安装环2上,且六处安装环2上通过弹簧顶推滑动套装有一处滑动圈3;
65.滑动圈3;滑动圈3包括前凸轴杆301和轨道圈302,滑动圈3的圆周内壁上环绕设置有六处前凸轴杆301,此六处前凸轴杆301的前端段上焊接有一处轨道圈302,六处前凸轴杆301的最前端焊接固定有一处受力圈5,且轨道圈302 的内部转动安装有一处齿圈4。
66.参照图3,安装环2还包括三角顶框202,六处定位轴201中上下对应的两处前端呈左右对向朝安装环2的中心处支撑焊接有两处三角顶框202。
67.参照图5,滑动圈3还包括插杆303,轨道圈302顶端位置的前侧壁上通过弹簧顶推贯穿插装有一处t形插杆303。
68.参照图7,齿圈4包括
69.保持杆401,齿圈4的内侧环形端面上环绕焊接有一圈共六处外凸保持杆 401;
70.后凸撑杆402,呈上下对应的两处保持杆401上对称焊接有两处后凸撑杆 402,此两处后凸撑杆402的首端均转动安装有一处导轮。
71.参照图3,受力圈5包括
72.摆杆501,受力圈5的圆周内壁上环绕转动连接有六处摆杆501;
73.从动齿轮502,六处摆杆501尾部转轴的后端套装有一处从动齿轮502。
74.参照图3,受力圈5被冲击后滑时两处后凸撑杆402上的两处导轮对应与两处三角顶框202的斜边顶推滚动接触,顶端后凸撑杆402与其右侧的定位轴201 之间挂撑设置有一处弹簧,将t形插杆303松脱后,此弹簧可自动将齿圈4拽拉回转复位并使六处摆杆501回转贴靠于受力圈5的内壁上(如图1所示),收缩贴靠状态的六处摆杆501能够将受力圈5的内部空间空出,避免遮挡妨碍镜头 101的拍摄视界。
75.参照图6,一圈共六处保持杆401对应与轨道圈302内部的环形轨道槽转动配合。
76.参照图6,一圈共六处从动齿轮502朝向轨道圈302支撑安装,且一圈从动齿轮502对应与齿圈4啮合接触。
77.参照图5,t形插杆303的底部段呈斜切结构,且t形插杆303的底部斜切段对应与齿圈4插接配合。
78.参照图10,包括以下步骤:
79.1、采用相机1采集被测目标的初步表面图像,处理获得初步三维点云图;
80.2、激光模组投射高分辨率红色条纹结构光编码至被测目标,采用相机1滤去白光以获取对应的红光编码表面图像;
81.3、在0.7秒内进行16次扫描,获取对应的红光编码表面图像;获得相机1 的融合红光表面图像;
82.4、根据融合的红光表面图像获取红光三维点云图;将红光三维点云图与初步三维点云图叠加处理,获得完整的三维点云图。
83.工作原理:安装环2用于将滑动圈3与相机1锁紧固定在一起,当相机1 不慎掉落触地时,受力圈5会套罩支撑保护镜头101,避免镜头101直接与地面冲击接触,且受力圈5在受到触地冲击时可通过滑动圈3压缩一圈定位轴201 上的弹簧对冲击力实施缓冲,通过斜面导向原理,受力圈5触地冲击带动齿圈4 和两处保持杆401后滑时可被两处三角顶框202的斜面导向驱使扭转,齿圈4 扭转又会啮合驱使一圈从动齿轮502和六处摆杆501同步摆转置于受力圈5的内部将镜头101内部的滤光玻璃片遮挡住,避免滤光玻璃片被硬物戳碎;
84.通过斜面导向原理,t形插杆303的底部斜切段能够对实时插接定位齿圈4,使齿圈4保持在冲击扭转的状态并使六处摆杆501保持在内转遮挡的使用状态,顶端后凸撑杆402与其右侧的定位轴201之间挂撑设置有一处弹簧,将t形插杆 303松脱后,此弹簧可自动将齿圈4拽拉回转复位并使六处摆杆501回转贴靠于受力圈5的内壁上(如图1所示),收缩贴靠状态的六处摆杆501能够将受力圈5的内部空间空出,避免遮挡妨碍镜头101的拍摄视界。
85.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在
不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。