1.本发明属于坚果生产开口技术领域,具体涉及一种智能坚果开口机的智能控制及推进系统。
背景技术:
2.坚果营养全面、丰富,常食对心脏病、癌症、血管病有预防和治疗作用,同时还可明目健脑;果壳坚硬,内含1粒或者多粒种子,如夏威夷果就具有良好的营养价值和药用价值,是一种广受欢迎的坚果食品;为方便食用,一般需要对果壳进行切缝,食用时采用钥匙片从切缝口转动即可快速、方便的开启果壳;现有坚果的夹持组件100推进均是采用若干个气缸作为单独推动夹具进行坚果夹持,如图1、图2所示,安装板101上安装有若干气缸102,安装板前端则安装有夹具板103,夹紧板103下端则设置有固定夹104,夹具板103上对应固定夹104滑动安装有活动夹105,气缸102能够推动活动夹105与固定夹104对合夹持圆形的坚果,伺服电机ⅰ106则带动安装板101前后运动;使用气缸推动夹持,因为气缸行程固定不变,导致了夹持力为刚性,固定夹104和活动夹105间隙为定值,无法快速调整,因此无法适应不同品种或大小的坚果,同时也无法实现夹持力的快速调整和电子化,且采用若干气缸单独推动,维护较为麻烦,需要向设备提供气源(汽泵动力设备等气动元件),运行时噪音较大;多个气缸无法集成进行电气化、智能模块化控制,维护和故障排除较为繁琐,气缸出现问题时不易察觉到,机体内供气线路臃肿。
技术实现要素:
3.针对上述问题,本发明提供采用伺服电机配合弹簧推进夹具进行坚果夹持且实现智能控制的坚果开口机智能控制及推进系统。
4.具体技术方案是:一种智能坚果开口机推进系统,包括安装板,所述安装板前端设置有夹具板,所述夹具板上则设置有固定夹,所述夹具板上对应固定夹滑动安装有活动夹,还包括伺服电机ⅱ,所述安装板远离夹具板侧安装有伺服电机ⅱ,所述伺服电机ⅱ转动端安装有丝杆ⅱ,所述丝杆ⅱ上螺纹连接有推动块,所述安装板上还安装有滑轨ⅱ,所述推动块底部安装有滑块ⅱ,所述滑块ⅱ能够沿滑轨ⅱ前后水平滑动,所述推动块上滑动插装有推动杆,所述推动杆穿过夹具板中的滑孔与活动夹连接,推动杆上安装有弹簧挡板,所述弹簧挡板位于夹具板与推动块间,推动杆上则套装有弹簧,弹簧两端分别顶压弹簧挡板和推动块。
5.进一步,还包括限位螺母,所述推动杆尾部安装有限位螺母。
6.进一步,所述夹具板上设置有转动支撑板,所述丝杆ⅱ插入转动支撑板中。即丝杆ⅱ插入转动支撑板中的轴承中,转动支撑板用于支持丝杆ⅱ。
7.进一步,还包括伺服电机ⅰ,所述伺服电机ⅰ转动端安装有带动安装板前后运动的丝杆ⅰ,所述支架上安装有滑轨ⅰ,所述安装板底部安装有滑块ⅰ,所述滑块ⅰ能够沿滑轨ⅰ前后水平滑动。
8.进一步,所述夹具板上并排设置有12个固定夹,所述夹具板上对应固定夹滑动安装有12个活动夹,所述推动杆也同样设置有12根,每根推动杆穿过夹具板中的滑孔与活动夹连接。通过推动杆能够推动活动夹与固定夹对合夹持圆形的坚果。
9.本发明的另一目的在于提供一种用于上述智能坚果开口机推进系统的控制系统,包括控制单元,所述控制单元通过人机交互单元实现信息输出与控制信息输入,所述控制单元分别控制推动系统工作单元和锯片切刀工作单元,还包括检测单元,所述检测单元将对推动系统工作单元复位检测信号传输回控制单元。
10.进一步,所述控制单元包括plc控制器,所述人机交互单元包括与plc控制器连接的触摸控制屏,所述检测单元包括安装在安装板和推动杆上的触碰检测器,设置在安装板下侧的光电检测器;所述推动系统工作单元包括带动安装板前后运动的伺服电机ⅰ和带动推动块前后运动的伺服电机ⅱ,所述锯片切刀工作单元包括锯片切刀电机。
11.本发明的有益效果:采用伺服电机、弹簧推动推动杆,能够推动活动夹与固定夹对合夹持圆形的坚果,因为是通过弹簧的弹力给予推动杆的夹持力,因此是个柔性的力,并不是刚性力,固定夹和活动夹间隙具有柔性;动力源的设置不在受汽泵动力设备等气动元件的限制,从而扩增了工位,机体内不再有臃肿的供气线路,维护和故障排除较为便捷;因为全部采用了伺服电动元件,因此能够采用智能模块进行数据化控制。
附图说明
12.图1是现有坚果开有设置中夹持组件推进结构的主视图。
13.图2是现有坚果开有设置中夹持组件推进结构的俯视图,其中仅画出了夹持组件。
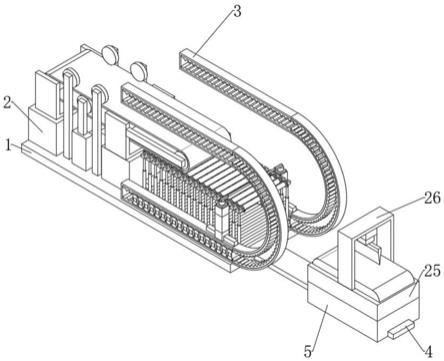
14.图3是本发明的推进系统进入接料槽待接料时的状态参考图,其中对接料槽、下料辊筒等进行局部剖视。
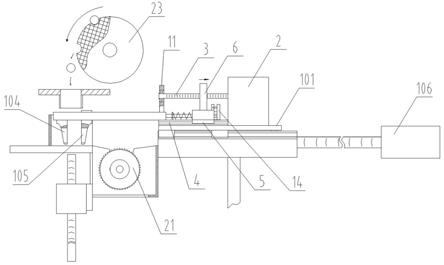
15.图4是本发明的推进系统回程运动至工作位时,锯片切刀即将升起时的结构示意图。
16.图5是图4的俯视图,其中仅画出了夹持组件。
17.图6是固定夹的正视图。
18.图7是推进系统电路外联电路图。
19.图8是推进系统的电路控制电路图。
20.图9是智能控制系统的单元逻辑图。
21.图10是智能控制系统的逻辑运行图。
22.上图中:100
‑
夹持组件,101
‑
安装板,102
‑
气缸,103
‑
夹具板,104
‑
固定夹,105
‑
活动夹,106
‑
伺服电机ⅰ,107
‑
丝杆ⅰ,108
‑
滑轨ⅰ,109
‑
滑块ⅰ;20
‑
滑孔,21
‑
锯片,22
‑
锯片切刀电机,23
‑
下料辊筒,24
‑
接料槽,25
‑
切刀口,26
‑
支架;2
‑
伺服电机ⅱ,3
‑
丝杆ⅱ,4
‑
滑轨ⅱ,5
‑
滑块ⅱ,6
‑
推动块,7
‑
推动杆,8
‑
弹簧挡板,9
‑
弹簧,10
‑
限位螺母,11
‑
转动支撑板,12
‑
plc控制器,13
‑
触摸控制屏,14
‑
触碰检测器,15
‑
光电检测器;301
‑
控制单元,302
‑
人机交互单元,400
‑
检测单元,500
‑
推动系统工作单元,600
‑
锯片切刀工作单元,700
‑
数据传输单元。
具体实施方式
23.为了使本发明所解决的技术问题、技术方案更加清楚明白,以下结合附图及实施例,对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
24.实施例1:如图3至5所示,一种智能坚果开口机推进系统,包括安装板101,安装板101为方形板,安装板101前端设置有夹具板103,夹具板103可以直接安装在安装板101前端(如现有技术一样,请参考图1),当然在本实施例中,夹具板103采用螺钉和螺孔固定方式直接安装在了滑轨ⅱ4前端部。
25.夹具板103下端则设置有固定夹104,夹具板103上对应固定夹104滑动安装有活动夹105,活动夹105能够与固定夹104对合夹持圆形的坚果。
26.还包括伺服电机ⅰ106,伺服电机ⅰ106安装于机架上(图中未画出),伺服电机ⅰ106转动端安装有带动安装板101前后运动的丝杆ⅰ107,丝杆ⅰ107通过安装在安装板101底部的螺纹孔板带动安装板101前后运动。
27.支架26上安装有滑轨ⅰ108,安装板101底部安装有滑块ⅰ109,滑块ⅰ109能够沿滑轨ⅰ108前后水平滑动,活动夹105与固定夹104上沿长度方向开有切刀口25,如图6所示,上述为现有技术与本发明的共有的技术,已为本领域技术人员所熟知。
28.安装板101远离夹具板103侧安装有伺服电机ⅱ2,即安装板101尾部上表面安装有伺服电机ⅱ2。
29.伺服电机ⅱ2转动端安装有丝杆ⅱ3,丝杆ⅱ3上螺纹连接有推动块6,同样采用在推动块6上设置有螺纹孔,丝杆ⅱ3通过螺纹孔板带动推动块6前后运动,为了保证前后运动的平稳性,安装板101上还安装有滑轨ⅱ4,滑轨ⅱ4沿长度方式水平对称设置有2根,而推动块6底部则安装有滑块ⅱ5,滑块ⅱ5能够沿滑轨ⅱ4前后水平滑动。
30.推动块6上滑动插装有推动杆7,推动杆7穿过夹具板103中的滑孔20与活动夹105连接,通过推动杆7能够推动活动夹105与固定夹104对合夹持圆形的坚果。
31.夹具板103与推动块6间的推动杆7部分安装有弹簧挡板8,推动杆7上则套装有弹簧9,弹簧9两端分别顶压弹簧挡板8和推动块6。
32.推动杆7尾部安装有限位螺母10,夹具板103上设置有转动支撑板11,丝杆ⅱ3插入转动支撑板11中的轴承上,通过轴承和转动支撑板11支撑丝杆ⅱ3转动。
33.在本实施例中夹具板103上并排设置有12个固定夹104,夹具板103上对应固定夹104滑动安装有12个活动夹105,推动杆7也同样设置有12根,每根推动杆7穿过夹具板103中的滑孔20与活动夹105连接,因为采用了统一的伺服电机转动丝杆,推动推动块6顶压弹簧9、弹簧挡板8的推动设计,动力源的设置不在受汽泵动力设备等气动元件的限制,从而扩增了工位,传统的现有气缸102一般只能实现8~10个工位设置,如图3所示,伺服电机ⅰ106工作,丝杆ⅰ107转动带动安装板101向前运动到复位点,此时活动夹105与固定夹104进入到接料槽24中带夹持接料;在上述运动过程中,伺服电机ⅱ2同样转动,丝杆ⅱ3转动带动推动块6向后运动,弹簧9张开不再顶压弹簧挡板8,且推动块6向后撤拉限位螺母10带动推动杆7向后运动,活动夹105向后滑动张开,下料辊筒23旋转,其中的坚果落入接料槽24中的活动夹105与固定夹104间;如图4所示,然后伺服电机ⅱ2
反向转动,丝杆ⅱ3转动带动推动块6向前运动,推动块6顶压弹簧9,弹簧9又顶压弹簧挡板8,从而带动推动杆7前后运动,活动夹105向前闭合夹持住坚果,因为是通过弹簧9的弹力给予推动杆7的夹持力,因此是个柔性的力,并不是刚性力,固定夹104和活动夹105间隙具有柔性,伺服电机ⅰ106同样反转工作,安装板101向后运动,此时锯片21升起,片切刀电机22转动带动锯片21转动,从切刀口25对坚果进行切割开口,当然在此过程中存在一个安装板101向后运动速度与锯片21升降速度的配比调整问题,但该问题为本领域采用锯片21的常规技术手段,通过快慢的有限次调整,本领域技术完全可以实现弧形开口,其为现有技术。
34.采用伺服电机、弹簧9推动推动杆7,能够推动活动夹104与固定夹105对合夹持圆形的坚果,因为是通过弹簧9的弹力给予推动杆7的夹持力,因此是个柔性的力,并不是刚性力,固定夹104和活动夹105间隙具有柔性;动力源的设置不在受汽泵动力设备等气动元件的限制,从而扩增了工位,机体内不再有臃肿的供气线路,维护和故障排除较为便捷;因为全部采用了伺服电动元件,因此能够采用智能模块进行数据化控制,采用220伏伺服电机带动锯片22的主轴、安装板101和活动夹105,无用电限电压限制,普通民用电压即可满足生产,一次性能完成12颗果的夹果、开口工作,提稿了生产效率。
35.实施例2:如图7至10所示,一种控制智能坚果开口机推进系统的智能控制系统,包括控制单元301,控制单元301通过人机交互单元302实现信息输出与控制信息输入,控制单元301分别控制推动系统工作单元500和锯片切刀工作单元600,还包括检测单元400,检测单元400将对推动系统工作单元500复位检测信号传输回控制单元301。
36.控制单元301包括plc控制器12,人机交互单元302包括与plc控制器12连接的触摸控制屏14。
37.检测单元400包括安装在安装板101和推动杆7上的触碰检测器14,设置在安装板101下侧的光电检测器15。
38.推动系统工作单元500包括带动安装板101前后运动的伺服电机ⅰ106和带动推动块6前后运动的伺服电机ⅱ2。
39.锯片切刀工作单元600包括锯片切刀电机22;当然还可以将控制单元301与数据传输单元700连接,采用gprs或3g/4g通信模块向接收设备发送运营数据或实现远程操控、远程教学等功能;当然该智能控制系统还可以将设备或配套设备的电机等原件联接进入系统内,进一步,扩大系统的控制范围。
40.以上通过具体的和优选的实施例详细的描述了本发明,但本领域技术人员应该明白,本发明并不局限于以上所述实施例,凡在本发明的精神和原则之内,所作的任何修改、等同替换等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。