1.本发明涉及焊接技术领域,尤其涉及一种红外线自动焊接机。
背景技术:
2.焊接就是运用各种可熔的合金(焊锡)联接金属部件的进程。焊锡的熔点比被焊材料的低,这样部件就会在不被熔化的情况下,通过其表面发生分子间的联络结束焊接,焊接可以分为软焊接和硬焊接,软焊接温度低于450℃,硬焊接高于450℃,硬焊接通常用于银、金、钢、铜等金属,其焊接点比软焊接强健得多,抗剪强度为软焊接的20~30倍,以上两种热联接通常均运用焊接这一术语,因为两例中均为将熔融的焊锡写入到两个待装置的清洁且挨近的固体金属表面的细长缝隙中。
3.专利公告cn104785974b文件提出的红外线自动定位焊接机对工件的焊缝和焊接头进行对齐定位时大多依靠人工手动测量对齐,不仅费时费力而且容易导致误差,从而造成工件焊接失败,影响加工,并且一般的焊接机的工作台只能夹持放置一组焊接件,无法同步、稳固夹持多组焊接件,以对其进行焊接。
技术实现要素:
4.有鉴于此,有必要提供一种红外线自动焊接机,用以解决水下采油树井口头与连接器间的高压密封失效的技术问题。
5.根据本发明的一个方面,提供一种红外线自动焊接机,包括:
6.操作台,其顶面安装有红外线自动焊接机本体用于对所述操作台上的焊接件进行焊接,且相对两端均分别固定安装有挡板,其底面沿其中一个所述挡板至另一个所述挡板方向延伸有限位滑槽;
7.夹紧装置,包括推动组件、弧形弹片以及两个夹板,两个所述夹板设于两个所述挡板之间,相邻间隔设置的夹板与挡板之间形成夹持区间,所述弧形弹片的相对两端滑动安装于所述限位滑槽内,且所述弧形弹片的相对两端分别与对应的两个所述夹板底部连接,所述推动组件的输出端与所述弧形弹片底部连接,以推动所述弧形弹片弹性形变而带动两个所述挡板背向移动,使得每个夹持区间内的焊接件由所述夹板与所述挡板配合夹持;
8.重力传感装置,设于所述操作台底部以测得焊接物的质量;
9.控制装置,分别与所述重力传感装置、推动组件以及红外线自动焊接机本体电性连接,所述控制装置根据所述焊接物的质量以控制所述推动组件和所述红外线自动焊接机本体工作。
10.根据一些实施例,还包括承载台和支撑架,所述承载台设于所述操作台的底部以通过所述支撑架承载所述操作台,所述推动组件固定安装于所述承载台上;
11.所述承载台与所述操作台之间间隔设置形成有弹性区间,所述弧形弹片设于所述弹性区间内,所述推动组件的输出端与所述弧形弹片的底部固定连接。
12.根据一些实施例,所述推动组件为气缸、油缸或电动推杆中的一种,所述推动组件
的输出端与所述弧形弹片的底部中心处固定连接。
13.根据一些实施例,所述弧形弹片的两端均为磁性材料制成,所述操作台为非磁性材料制成,所述弧形弹片的两端分别与对应的两个所述夹板磁性连接。
14.根据一些实施例,所述操作台设有通槽,两个所述夹板均分别沿所述通槽长度方向移动,所述弧形弹片的两端分别与对应的所述两个夹板底部固定连接,以配合两个所述挡板夹持焊接件。
15.根据一些实施例,两个所述夹板分别与所述通槽滑动连接。
16.根据一些实施例,所述夹板的相对两侧设有限位件,所述通槽的相对两侧分别设有限位槽,所述限位件与所述限位槽滑动配合连接。
17.根据一些实施例,所述夹板包括固定板和抵接板,所述抵接板的底部与所述弧形弹片固定连接,所述固定板与所述抵接板垂直,所述固定板与所述抵接板共同对焊接件进行限位。
18.根据一些实施例,还包括锁紧杆,所述抵接板上设有锁紧孔,所述锁紧杆与所述锁紧孔螺纹连接以紧固焊接件。
19.根据一些实施例,所述控制装置安装于所述红外线自动焊接机本体上。
20.与现有技术相比,本发明的有益效果如下:
21.该红外线自动焊接机工作时,由重力传感装置感应到操作台上放置有焊接件,控制装置控制推动组件向上推动弧形弹片,使得弧形弹片形变而带动两个挡板于操作台的台面背向滑动,两个夹持区间内的挡板与夹板共同夹持焊接件。通过该红外线自动焊接机不仅可以实现自动感应夹持焊接件,而且使用弧形弹片可极大提高夹持过程的同步性,且进一步地通过一组推动组件便实现夹持两组焊件的效果,以降低该红外线自动焊接机生产的成本,实现工业生产最大效益。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
23.图1为本发明提供的一种红外线自动焊接机的结构示意图;
24.图2为本发明提供的一种红外线自动焊接机的挡板为磁性材料制成时的结构示意图;
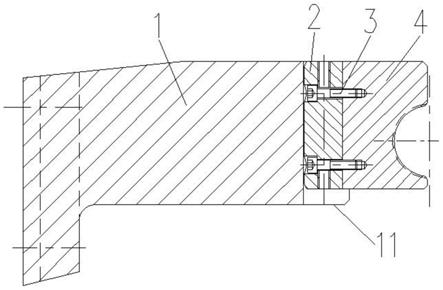
25.图3为本发明提供的一种红外线自动焊接机的部分结构示意图。
26.图中:操作台100、红外线自动焊接机本体110、挡板120、通槽130、限位槽131、夹紧装置200、推动组件210、弧形弹片220、夹板230、限位件231、固定板232、抵接板233、锁紧孔234、夹持区间240、重力传感装置300、控制装置400、承载台500、弹性区间510、焊接件600。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不
用于限定本发明。
28.请参阅图1至图3,本发明提供一种红外线自动焊接机,该红外线自动焊接机包括操作台100、夹紧装置200、重力传感装置300、控制装置400,其中操作台100顶部安装有红外线自动焊接机本体110,用于对操作台100上的焊接件进行焊接,其中夹紧装置200安装于作台100上,用于夹紧焊接件600,另外操作台100的顶部安装有红外线自动焊接机本体110,用于对操作台100上的焊接件600进行焊接,控制装置400分别与重力传感装置300、夹紧装置200以及红外线自动焊接机本体110电性连接,控制装置400根据焊接物的质量以控制夹紧装置200夹紧操作台100台面上的焊接件,紧接着控制红外线自动焊接机本体110对焊接件进行自动焊接,实现工业生产最大效益。其具体方案如下。
29.操作台100的顶部台面的相对两端均分别固定安装有挡板120,其底面沿其中一个挡板120至另一个挡板120方向延伸有限位滑槽(未在图中示出)。
30.夹紧装置200包括推动组件210、弧形弹片220以及两个夹板230,两个夹板230设于两个挡板120之间,相邻间隔设置的夹板230与挡板120之间形成夹持区间240,弧形弹片220的相对两端滑动安装于限位滑槽内,每个夹持空间可放置焊接件600,弧形弹片220的相对两端分别与对应的两个夹板230底部连接,推动组件210的输出端与弧形弹片220底部连接,以推动弧形弹片220弹性形变而带动两个夹板230背向滑动,使得每个夹持区间240内的焊接件600由夹板230与挡板120共同夹持。
31.重力传感装置300设于操作台100底部以测得焊接物的质量。其中重力传感装置300可具体为重力传感器。
32.控制装置400分别与重力传感装置300、推动组件210以及红外线自动焊接机本体110电性连接,控制装置400根据焊接物的质量以控制推动组件210和红外线自动焊接机本体110工作。其中控制装置400可固定安装于操作台100上,也可以是固定安装于红外线自动焊接机本体110上。其中控住装置400可以是控制器或上位机。
33.在上述方案中,该红外线自动焊接机工作时,由重力传感装置300感应到操作台100上放置有焊接件600,控制装置400控制推动组件210向上推动弧形弹片220,使得弧形弹片220形变,弧形弹片220的相对两端于限位滑槽内朝相反方向滑动,而带动两个夹板230于操作台100的台面背向滑动,两个夹持区间240内的挡板120与夹板230共同夹持焊接件600。通过该红外线自动焊接机不仅可以实现自动感应夹持焊接件600,而且使用弧形弹片220可极大提高夹持过程的同步性,且进一步地通过一组推动组件210便实现夹持两组焊件的效果,以降低该红外线自动焊接机生产的成本,实现工业生产最大效益。
34.根据一些实施例,该红外线自动焊接机还包括承载台500和支撑架,承载台500设于操作台100的底部以通过支撑架承载操作台100,推动组件210固定安装于承载台500上。承载台500与操作台100之间间隔设置形成有弹性区间510,弧形弹片220设于弹性区间510内,推动组件210的输出端与弧形弹片220的底部固定连接。其中支撑架可以是柱子,也可以是由钢架搭建的支架。
35.另外,推动组件210为气缸、油缸或电动推杆中的一种,推动组件210的输出端与弧形弹片220的底部中心处固定连接。当推动组件210为气缸时,推动组件210的伸缩杆与弧形弹片220的底部中心处固定连接,使得通过伸缩杆在伸缩的过程,推动弧形弹片220的中心处形变,使得弧形弹片220的两端伸展,与之连接的两个夹板230背向滑动,两个夹板230分
别与两个挡板120一一对应,以夹持焊接件600,供红外线自动焊接机本体110对焊接件600进行焊接。
36.如图2所示,为了使得弧形弹片220的两端伸展时,两个夹板230能随之背向滑动,本发明提供一种弧形弹片220与夹板230的连接方式。弧形弹片220的两端均为磁性材料制成,操作台100为非磁性材料制成,弧形弹片220的两端分别与对应的两个夹板230磁性连接。从而通过弧形弹片220的伸展,两个夹板230随之移动,以对应的配合挡板120夹紧焊接件600。
37.其中,弧形弹片220的两端与两个夹板230之间可以是两者之间间隔有操作台100,也可以是弧形弹片220的两端与两个夹板230之间直接磁性连接。当弧形弹片220的两端与两个夹板230之间直接磁性连接时,操作台100设有通槽130的台面设于长圆孔,夹板230直接于长圆孔内移动。
38.如图3所示,本发明还提供一种弧形弹片220与夹板230的连接方式。具体为操作台100设有通槽130,操作台100设有通槽130,两个夹板230均分别沿通槽130长度方向移动,弧形弹片220的两端分别与对应的两个夹板230底部固定连接,以配合两个挡板120协同夹持焊接件600。
39.其夹,夹板230与通槽130之间可以是间隔设置,也可以是滑动,还可以是滚动等方式使得两个夹板230均分别沿通槽130长度方向移动。夹板230与通槽130之间间隔设置时,夹板230的重力由弧形弹片220承载。夹板230与通槽130之间滑动或滚动连接时,夹板230的重力可由操作台100承担。
40.当两个夹板230分别与通槽130滑动连接时,夹板230的相对两侧设有限位件231,通槽130的相对两侧分别设有限位槽131,限位件231与限位槽131滑动配合连接。从而通过限位件231于对夹板230的位移进行限位。
41.根据一些实施例,由于焊接件600的形状可分为规则和不规则,以至于焊接件600仅通过平板之间夹持,焊接件600在外力作用下,易发生位移,无法使得焊接件600之间紧固夹持的需求。为了使得焊接件600可通过夹板230和挡板120紧固夹持,根据一些实施例,夹板230包括固定板232和抵接板233,抵接板233的底部与弧形弹片220固定连接,固定板232与抵接板233垂直,固定板232与抵接板233共同对焊接件600进行限位。
42.该红外线自动焊接机还包括锁紧杆,抵接板233上设有锁紧孔234,锁紧杆与锁紧孔234螺纹连接。在夹紧焊接件600过程中,将焊接件600固定,且通过夹板230的固定板232和抵接板233对焊接件600进行限位,再通过拧紧抵接板233上的锁紧杆,使得锁紧杆的杆部与焊接件600抵接,以紧固焊接件600。
43.工作原理:该红外线自动焊接机工作时,由重力传感装置300感应到操作台100上放置有焊接件600,控制装置400控制推动组件210向上推动弧形弹片220,使得弧形弹片220形变而带动两个夹板230于操作台100的台面背向滑动,两个夹持区间240内的挡板120与夹板230共同夹持焊接件600。通过该红外线自动焊接机不仅可以实现自动感应夹持焊接件600,而且使用弧形弹片220可极大提高夹持过程的同步性,且进一步地通过一组推动组件210便实现夹持两组焊件的效果,以降低该红外线自动焊接机生产的成本,实现工业生产最大效益。
44.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述
中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。