1.本发明涉及显示辅助程序、存储有该程序的计算机可读存储介质、显示辅助方法及显示辅助系统。
背景技术:
2.在电动机控制中,将使成为动作基准的主轴、和与该主轴联动的从轴的动作定时一致的控制称为同步控制。以往,通过使主轴和从轴经由例如凸轮、齿轮等机械地联动而进行同步控制。但是,为了装置的小型化、高性能化,近年来,大多通过对各个电动机进行单独地控制而使主轴和从轴电联动,由此进行同步控制。
3.为了进行这样的同步控制,需要对同步控制程序进行创建,通常需要记述多个从轴的动作。这里,例如,通过将凸轮动作及齿轮动作等各轴的功能模块化,将该模块化后的软件模块组合而对同步控制程序进行创建,从而实现同步控制程序的创建工序的简化。
4.这样的同步控制的软件模块的组合方法大致区分为2种组合方法。其中,一种是使用例如梯形图语言、fbd(function block digram)、c语言、st(structured text)语言、sfc(sequence function chart)语言等通用语言,将同步控制的软件模块设定为子程序的方法。
5.而且,作为使由这些通用语言记述的程序容易辨识的技术,例如已知专利文献1所记载的技术,其公开了如下技术,即,利用模块来表示由梯形图语言记述的控制程序,并且附加执行顺序而显示于个人计算机的显示画面,进行控制程序的模拟,其中所述模块是利用函数对执行各控制工序的设备进行定义的而得到的。
6.另一种是如下方法,即,预先准备与各种软件模块的功能对应的例如凸轮、齿轮等机械部件作为机构要素图,用户通过对该机构要素图进行选择、配置而对机构图进行创建,由此对与机构图对应的同步控制程序进行创建。而且,作为不仅限于预先准备的机构要素图,还要提高由机构图实现的程序的控制算法的自由度的技术,例如已知存在专利文献2所记载的技术,其公开了如下技术,即,配置对同步关系进行图示的机构要素图而对机构图进行描绘,并且能够通过从外部输入的参数对与机构要素图对应的软件模块的设定值进行变更,使用通用语言对机构要素图的参数设定进行变更。
7.专利文献1:日本特开2009
‑
080738号公报
8.专利文献2:日本特开wo2016/00289号公报
技术实现要素:
9.根据上述专利文献1的技术,能够将由梯形图语言记述的定序程序的执行顺序可视化而进行辨识。但是,无法将主轴和从轴的同步关系可视化。另外,根据上述专利文献2的技术,与仅使用机构图的方法相比,通过并用不专门用于同步控制的通用语言和由机构图实现的编程,能够提高控制算法的自由度。但是,用户除了使用通用语言创建程序的作业之
外,需要机构图的创建的作业,因此用户的作业工时多。
10.本发明就是鉴于上述问题而提出的,其目的在于提供能够以更少的作业工时将由通用语言记述的同步控制程序中的主轴和从轴的同步关系可视化的显示辅助程序、存储有该程序的计算机可读存储介质、显示辅助方法及显示辅助系统。
11.为了达成上述目的,在技术方案1所记载的发明中,使计算机执行:参数读出步骤,从同步控制程序读出主轴的识别信息、从轴的识别信息、及对软件模块的功能进行确定的信息即功能信息作为同步参数,该同步控制程序是将以成为动作基准的主轴的识别信息及与主轴联动的从轴的识别信息作为自变量的多个软件模块组合而构成的,并且是由通用语言记述的;机构要素图选择步骤,从表示主轴的机构要素图、表示从轴的机构要素图、及表示软件模块的功能的机构要素图,对与通过参数读出步骤读出的同步参数对应的机构要素图进行选择;机构图生成步骤,将通过机构要素图选择步骤选择出的机构要素图组合而生成机构图;以及显示步骤,将通过所述机构图生成步骤生成的机构图显示于显示部。
12.发明的效果
13.根据本发明,能够以少的作业工时将由不专门用于同步控制的通用语言记述的同步控制程序中的主轴和从轴的同步关系可视化。
附图说明
14.图1是表示本发明的实施方式1涉及的显示辅助系统的图,包含与该显示辅助系统连接的电动机控制系统的硬件结构。
15.图2是表示本发明的实施方式1涉及的显示辅助系统的硬件结构的图。
16.图3是表示本发明的实施方式1涉及的显示辅助系统的功能模块的图。
17.图4是表示由本发明的实施方式1涉及的显示辅助系统创建的同步控制程序的一个例子的图。
18.图5是表示本发明的实施方式1涉及的显示辅助系统从同步控制程序读出的同步参数的存储形式的图。
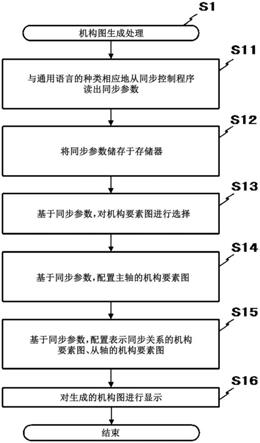
19.图6是表示由本发明的实施方式1涉及的显示辅助系统执行的机构图生成处理的流程图的一个例子的图。
20.图7是表示由本发明的实施方式1涉及的显示辅助系统生成的机构图的一个例子的图。
21.图8是表示本发明的实施方式2涉及的显示辅助系统的图,包含与该显示辅助系统连接的电动机控制系统的硬件结构。
22.图9是表示由本发明的实施方式2涉及的显示控制装置创建的同步控制程序的一个例子的图。
23.图10是表示本发明的实施方式2涉及的显示辅助系统从同步控制程序读出的同步参数的储存例的图。
24.图11是表示由本发明的实施方式2涉及的显示辅助系统生成的机构图的一个例子的图。
25.图12是表示本发明的实施方式3涉及的显示辅助系统的图,包含与该显示辅助系统连接的电动机控制系统的硬件结构。
26.图13是表示由本发明的实施方式3涉及的显示辅助系统创建的同步控制程序的一个例子的图。
27.图14是表示本发明的实施方式3涉及的显示辅助系统从同步控制程序读出的同步参数的储存例的图。
28.图15是表示由本发明的实施方式3涉及的显示辅助系统生成的机构图的一个例子的图。
29.图16是表示本发明的实施方式4涉及的显示辅助系统的图,包含与该显示辅助系统连接的电动机控制系统的硬件结构。
30.图17是表示由本发明的实施方式4涉及的显示控制装置创建的同步控制程序的一个例子的图。
31.图18是表示由本发明的实施方式4涉及的显示辅助系统执行的机构图生成处理的流程图的一个例子的图。
32.图19(a)是表示本发明的实施方式4涉及的显示辅助系统在不允许齿轮控制模块的执行时从同步控制程序读出的同步参数的储存例的图。
33.图19(b)是表示本发明的实施方式4涉及的显示辅助系统在允许齿轮控制模块的执行时从同步控制程序读出的同步参数的储存例的图。
34.图20(a)是表示通过本发明的实施方式4涉及的显示辅助系统,使用不允许齿轮控制模块的执行时的同步参数创建出的机构图的一个例子的图。
35.图20(b)是表示通过本发明的实施方式4涉及的显示辅助系统,使用允许齿轮控制模块的执行时的同步参数创建出的机构图的一个例子的图。
36.图21是表示本发明的实施方式5涉及的显示辅助系统的结构的图。
37.图22是表示作为软件模块的另一个例子的离合器控制模块的一个例子的图。
38.图23是表示作为软件模块的另一个例子的差动控制模块的一个例子的图。
具体实施方式
39.实施方式1.
40.一边参照图1~图7,一边对本发明的实施方式1涉及的显示辅助程序、存储有该程序的计算机可读存储介质、显示辅助方法及显示辅助系统进行说明。
41.图1是表示本发明的实施方式1涉及的显示辅助系统1的图,包含以有线方式与该显示辅助系统1可通信地连接的电动机控制系统20的硬件结构。显示辅助系统1通过将显示辅助程序安装于计算机10而实现。在本实施方式1中,在该计算机10不仅安装显示辅助程序,还安装使用例如梯形图语言、fbd、c语言、st语言、及sfc语言等通用语言对同步控制程序进行创建的同步控制程序创建程序(下面,称为创建程序)。即,在实施方式1中,显示辅助系统1是将电动机控制系统20作为对象而对由该电动机控制系统20执行的同步控制程序进行创建,并且利用该创建出的同步控制程序自动地对机构图进行创建的系统。
42.此外,在本实施方式1中,在计算机10中除了显示辅助程序之外,还安装创建程序,但创建程序也可以不安装于计算机10。即,也可以不通过该显示辅助系统1预先对同步控制程序进行创建。在该情况下,显示辅助系统1将例如通过其它计算机等预先创建出的同步控制程序作为对象而自动地对机构图进行创建。另外,在本实施方式1中,作为计算机10采用
了笔记本电脑,但并不限于此,也可以是其它例如台式个人电脑、智能电话、平板终端等。
43.接着,对设为同步控制程序的创建对象的电动机控制系统20进行说明。如图1所示,电动机控制系统20构成为具有运动控制器21、第1电动机驱动器22a、第2电动机驱动器22b、第3电动机驱动器22c、第1电动机23a、第2电动机23b、第3电动机23c。运动控制器21通过将由显示辅助系统1预先创建出的同步控制程序从该显示辅助系统1写入至未图示的存储器等,执行所写入的同步控制程序而进行同步控制。
44.详细而言,运动控制器21连接于将用于使第1电动机23a动作的动作电流输出至该第1电动机23a的第1电动机驱动器22a,通过执行同步控制程序,对第1电动机驱动器22a赋予驱动指令。相同地,运动控制器21连接于将用于使第2电动机23b动作的动作电流输出至该第2电动机23b的第2电动机驱动器22b,通过执行同步控制程序,对第2电动机驱动器22b赋予驱动指令。另外,相同地,运动控制器21连接于将用于使第3电动机23c动作的动作电流输出至该第3电动机23c的第3电动机驱动器22c,通过执行同步控制程序,对第3电动机驱动器22c赋予驱动指令。
45.在实施方式1中,电动机控制系统20将第1电动机23a设为成为动作基准的主轴,将第2电动机23b及第3电动机23c设为与第1电动机23a联动的从轴。而且,一边使第1电动机23a及第2电动机23b进行凸轮动作,并且,一边使第1电动机23a及第3电动机23c进行齿轮动作,一边对第1电动机驱动器22a~第3电动机驱动器22c分别赋予驱动指令,以使得动作定时一致,由此对第1电动机23a~第3电动机23c进行同步控制。对于构成电动机控制系统20的第1电动机23a~第3电动机23c,作为对它们进行确定的识别信息而分别分配有识别编号“m1”、“s1”、及“s2”。另外,在实施方式1中,电动机控制系统20不具有凸轮及齿轮等机械要素,通过使第1电动机23a~第3电动机23c电联动,进行第1电动机23a~第3电动机23c的同步控制。
46.此外,电动机控制系统20的结构并不限于上述结构。也可以是电动机控制系统20具有凸轮及齿轮等机械要素,通过使第1电动机23a~第3电动机23c机械地联动,进行第1电动机23a~第3电动机23c的同步控制。另外,也可以将第1电动机23a设为从轴,将第2电动机23b设为主轴,将第3电动机23c设为从轴。在该情况下,例如,分别将识别编号“s1”、“m1”、及“s2”分配给这些第1电动机23a、第2电动机23b、及第3电动机23c即可。对第1电动机23a~第3电动机23c分配了识别编号,但并不限于编号,也可以是其它例如字符串等,只要是能够对它们进行识别的信息即可。另外,关于电动机控制系统20所具有的电动机驱动器、电动机,也并不限于图1所示的数量,能够进行适当变更。
47.图2是表示实施方式1涉及的显示辅助系统1的硬件结构的图。如图2所示,显示辅助系统1构成为具有处理器11、存储器12、输入装置13、显示装置14、及通信装置15,这些处理器11、存储器12、输入装置13、显示装置14、及通信装置15例如通过总线等彼此连接,进行信息的收发。
48.处理器11例如是cpu(central processing unit)等。存储器12例如是ram(random access memory)、rom(read only memory)、闪存等非易失性或易失性半导体存储器、磁盘等。在存储器12中,例如,如使用图3后述的那样,对创建辅助程序12a、显示辅助程序12b、机构要素图12c、同步控制程序12d、控制对象的构成电动机控制系统20的第1电动机23a~第3电动机23c的识别编号12e、同步参数12f、及机构图12g等进行存储。此外,机构要素图12c在
显示辅助程序12b被安装于存储器12时,同时存储于存储器12。识别编号12e在通过执行创建辅助程序12a而创建同步控制程序12d并将其存储于存储器12时,同时存储于存储器12。输入装置13例如为键盘或鼠标等,但并不限于键盘或鼠标。显示装置14例如是液晶显示装置等,对同步控制程序等的字符串、机构图等图像进行显示。通信装置15以有线方式与电动机控制系统20进行通信,但也可以构成为能够以无线方式进行通信。
49.图3是表示实施方式1涉及的显示辅助系统1的一部分功能模块图的图。如图3所示,显示辅助系统1构成为具有控制部16。该控制部16具有程序创建部16a、参数读出部16b、机构要素图选择部16c、机构图生成部16d、显示控制部16e、及通信控制部16f。构成控制部16的各部16a~16f通过由处理器11从存储器12读出并执行创建辅助程序12a及显示辅助程序12b而实现。
50.此外,在本实施方式1中,设为如下方式,即,创建辅助程序12a及显示辅助程序12b例如在被写入至cd(compact disc)
‑
rom、dvd(digital versatile disc)
‑
rom等记录介质的状态下提供给用户,由用户预先安装于存储器12,但并不限于该方式,也可以是如下方式,即,创建辅助程序12a及显示辅助程序12b经由互联网等通信线路而提供给用户,由用户预先安装于存储器12。
51.程序创建部16a连接于存储器12、输入装置13、及显示控制部16e等。程序创建部16a按照使用了输入装置13的用户操作,通过通用语言而新创建同步控制程序。所使用的通用语言的种类在开始同步控制程序的新创建时,通过使用了输入装置13的用户操作而被输入。程序创建部16a在新创建了同步控制程序的情况下,将该新创建出的同步控制程序12d、构成电动机控制系统20的第1电动机23a~第3电动机23c的识别编号12e、创建出的通用语言的种类信息等存储于存储器12。另外,程序创建部16a按照使用了输入装置13的用户操作,通过在创建同步控制程序12d时使用的通用语言,对同步控制程序12d进行编辑。在对同步控制程序12d进行编辑时,程序创建部16a读出在存储器12存储的编辑前的同步控制程序12d及识别编号12e并进行编辑。程序创建部16a在对同步控制程序进行了编辑的情况下,将该编辑后的同步控制程序12d、及识别编号12e存储于存储器12。另外,程序创建部16a在执行同步控制程序12d的新创建或编辑时,将显示于显示装置14的字符串、机构图等图像输出至显示控制部16e。显示控制部16e在显示装置14对从程序创建部16a输入的图像进行显示控制。此外,后面参照图4对通过程序创建部16a新创建或编辑的同步控制程序12d进行叙述。
52.参数读出部16b连接于存储器12、输入装置13、及显示控制部16e等。参数读出部16b在执行后面参照图6叙述的机构图生成处理s1时,读出在存储器12存储的同步控制程序12d、及创建出该同步控制程序12d的通用语言的种类信息,从该读出的同步控制程序12d与通用语言的种类相应地读出同步参数12f。参数读出部16b在读出了同步控制参数的情况下,将该读出的同步参数12f存储于存储器12。另外,参数读出部16b在从同步控制程序12d读出同步参数12f时,将显示于显示装置14的字符串、机构图等图像输出至显示控制部16e,显示控制部16e在显示装置14对从参数读出部16b输入的图像进行显示控制。此外,后面参照图4,对从同步控制程序12d读出同步参数12f的方法进行叙述,后面参照图5,对将读出的同步参数12f向存储器12存储时的存储形式进行叙述。
53.机构要素图选择部16c连接于机构图生成部16d及存储器12等。机构要素图选择部
16c在执行后面参照图6叙述的机构图生成处理时,读出在存储器12存储的同步参数12f,从在存储器12预先存储的机构要素图12c,选择与该读出的同步参数12f对应的机构要素图。而且,机构要素图选择部16c将选择出的机构要素图12c输出至机构图生成部16d。此外,在存储器12中,作为机构要素图12c,例如预先存储有表示凸轮动作的机构要素图、表示齿轮动作的机构要素图、表示用于在使主轴旋转的状态下使从轴平滑地停止的离合器动作的机构要素图、表示以双轴的主轴的位置信息的差分作为从轴的动作指令的差动动作的机构要素图等表示同步关系的机构要素图、主轴的机构要素图、及从轴的机构要素图等。
54.机构图生成部16d连接于机构要素图选择部16c、显示控制部16e、及存储器12等。机构图生成部16d在执行后面参照图6叙述的机构图生成处理s1时,读出在存储器12存储的同步参数12f,按照该读出的同步参数12f,将通过机构要素图选择部16c选择出的机构要素图12c组合,生成机构图12g。另外,机构图生成部16d将显示于显示装置14的字符串、所生成的机构图等图像输出至显示控制部16e,显示控制部16e在显示装置14对从参数读出部16b输入的图像进行显示控制。此外,按照同步参数12f,将选择出的机构要素图12c组合,后面参照图6对生成机构图12g的机构图生成处理进行叙述。另外,后面参照图7对通过执行机构图生成处理而生成的机构图12g的一个例子进行叙述。
55.显示控制部16e连接于程序创建部16a、参数读出部16b、机构图生成部16d、显示装置14等,在显示装置14对从这些各部输入的图像进行显示控制。
56.通信控制部16f连接于存储器12、输入装置13、及通信装置15等,进行与连接于通信装置15的外部设备的通信。详细而言,通信控制部16f按照使用了输入装置13的用户操作,读出在存储器12存储的同步控制程序12d,将读出的同步控制程序12d写入至与通信装置15连接的电动机控制系统20的存储器。
57.图4是表示由实施方式1涉及的显示辅助系统1的用户新创建或编辑的、显示于显示装置14的显示画面14a的同步控制程序12d一个例子的图。如图4所示,同步控制程序12d由不专门用于同步控制的通用语言的一个例子即fbd语言记述。
58.在图4所示的例子中,在同步控制程序12d中包含有:凸轮控制模块121,其为记述了凸轮动作的功能的软件模块;以及齿轮控制模块122,其为记述了齿轮动作的功能的软件模块,这些凸轮控制模块121及齿轮控制模块122在显示画面14a中以不在左右方向错开的方式排列配置于上下方向。
59.在由fbd语言创建的程序中,基于各软件模块的例如左上角部等的坐标位置而规定执行顺序。具体而言,在显示画面14a中越是配置于上下方向上方的软件模块执行顺序越早,在显示画面14a上越是配置于左右方向左方的软件模块执行顺序越早。因此,在图4所示的同步控制程序12d中,由于同步控制程序12d由2个软件模块构成,凸轮控制模块121与齿轮控制模块122相比执行顺序早,因此表示凸轮控制模块121的执行顺序的信息即执行顺序信息为“1”,齿轮控制模块122的执行顺序信息为“2”。在显示辅助系统1的用户利用fbd语言而创建了同步控制程序12d的情况下,用户不需要重新对各软件模块的执行顺序进行设定,能根据各软件模块的配置位置自动地进行判断。
60.凸轮控制模块121将对成为动作基准的主轴进行确定的主轴识别编号121a、对与主轴联动的从轴进行确定的从轴识别编号121b、表示允许或不允许该凸轮控制模块121本身执行的信息即执行允许信息121c、对多个凸轮曲线的种类进行确定的凸轮编号121d作为
输入变量。此外,在实施方式1中,凸轮控制模块121能够将“正弦曲线”指定为凸轮编号“1”,将“摆线曲线”指定为凸轮编号“2”,将“等加速度曲线”指定为凸轮编号“3”。但是,关于凸轮曲线的种类,并不限于“正弦曲线”、“摆线曲线”、及“等加速度曲线”等,其是任意的,关于凸轮曲线的种类的数量,并不限于“3种”,其是任意的。
61.主轴识别编号121a及从轴识别编号121b是显示辅助系统1的用户在对同步控制程序12d进行创建时,与作为同步控制对象的电动机控制系统20的结构对应而设定的识别编号。在实施方式1中,由于将电动机控制系统20(图1)的第1电动机23a设为主轴,将第2电动机23b设为从轴,因此将第1电动机23a的识别编号即“m1”设定为主轴识别编号,将第2电动机23b的识别编号即“s1”设定为从轴识别编号。
62.执行允许信息121c是显示辅助系统1的用户在对同步控制程序12d进行创建时设定的执行条件。在本实施方式1中,由于电动机控制系统20将第1电动机23a设为主轴,将第2电动机23b设为从轴,一边使它们始终进行凸轮动作一边进行同步控制,因此执行允许信息121c被设定为“on”。
63.凸轮编号121d是显示辅助系统1的用户在对同步控制程序12d进行创建时设定的凸轮曲线的编号。在本实施方式1中,由于相对于电动机控制系统20的设为主轴的第1电动机23a,设为从轴的第2电动机23b例如一边按照正弦曲线进行动作一边进行同步控制,因此凸轮编号被设定为与“正弦曲线”对应的编号即“1”。
64.齿轮控制模块122将对成为动作基准的主轴进行确定的主轴识别编号122a、对与主轴联动的从轴进行确定的从轴识别编号122b、表示允许或不允许该齿轮控制模块122本身执行的信息即执行允许信息122c、表示用于对相对于主轴位置的从轴位置进行计算的比率的齿轮比的信息即齿轮比122d作为输入变量。此外,在实施方式1中,齿轮控制模块122例如能够将“1”至“32”指定为齿轮比。但是,关于齿轮比,并不限于“1”至“32”,其是任意的。
65.主轴识别编号122a及从轴识别编号122b与凸轮控制模块121的情况相同地,是显示辅助系统1的用户在对同步控制程序12d进行创建时,与作为同步控制对象的电动机控制系统20的结构对应而设定的识别编号。在实施方式1中,由于将电动机控制系统20(图1)的第1电动机23a设为主轴,将第3电动机23c设为从轴,因此将第1电动机23a的识别编号即“m1”设定为主轴识别编号,将第3电动机23c的识别编号即“s2”设定为从轴识别编号。
66.执行允许信息122c也与凸轮控制模块121的情况相同地,是显示辅助系统1的用户在对同步控制程序12d进行创建时设定的执行条件。在本实施方式1中,由于电动机控制系统20将第1电动机23a设为主轴,将第3电动机23c设为从轴,一边使它们始终进行齿轮动作一边进行同步控制,因此执行允许信息122c被设定为“on”。
67.齿轮比122d是显示辅助系统1的用户在对同步控制程序12d进行创建时设定的齿轮比。在本实施方式1中,由于相对于电动机控制系统20的设为主轴的第1电动机23a,设为从轴的第3电动机23c以齿轮比“2”被同步控制,因此齿轮比被设定为“2”。
68.图5是表示在实施方式1涉及的显示辅助系统1中,从同步控制程序12d读出的同步参数12f向存储器12的储存形式的一个例子的图。同时参照该图5,对从同步控制程序12d读出同步参数12f的同步参数读出处理,另外,对通过同步参数读出处理读出的同步参数12f向存储器12的存储处理进行说明。
69.参数读出部16b根据同步控制程序12d所包含的软件模块的名称,对确定软件模块
的功能的信息即功能信息进行判断,读出为同步参数12f。另外,参数读出部16b如上所述地对各软件模块的执行顺序进行判断,读出为同步参数12f。另外,参数读出部16b根据同步控制程序12d所包含的各软件模块的输入变量,将主轴编号、从轴编号、及执行允许信息读出为同步参数12f。参数读出部16b如果读出了同步参数12f,则使用例如开始标签及结束标签等将同步参数12f向存储器12储存。
70.具体而言,由于同步控制程序12d由凸轮控制模块121及齿轮控制模块122构成,因此同步参数读出部16b将对软件模块的功能进行确定的信息即功能信息判断为“凸轮控制模块”及“齿轮控制模块”,读出为同步参数12f。而且,参数读出部16b在开始标签<同步参数>和结束标签</同步参数>之间,以各自缩进一个字符的方式记述开始标签<凸轮控制模块>和结束标签</凸轮控制模块>、及开始标签<齿轮控制模块>和结束标签</齿轮控制模块>。
71.另外,由于凸轮控制模块121的执行顺序、输入变量如上所述,因此同步参数读出部16b对各软件模块的执行顺序进行判断,并且将各软件模块的输入变量读出为同步参数12f。而且,同步参数读出部16b在开始标签<凸轮控制模块>和结束标签</凸轮控制模块>之间,以各自缩进一个字符的方式记述开始标签<执行顺序>和结束标签</执行顺序>、开始标签<主轴编号>和结束标签</主轴编号>、开始标签<从轴编号>和结束标签</从轴编号>、及开始标签<执行允许>和结束标签</执行允许>,在各开始标签及结束标签之间,记述所对应的输入变量。
72.相同地,由于齿轮控制模块122的执行顺序、输入变量如上所述,因此参数读出部16b读出这些执行顺序、输入变量,并且在开始标签<齿轮控制模块>和结束标签</齿轮控制模块>之间,以各自缩进一个字符的方式记述开始标签<执行顺序>和结束标签</执行顺序>、开始标签<主轴编号>和结束标签</主轴编号>、开始标签<从轴编号>和结束标签</从轴编号>、及开始标签<执行允许>和结束标签</执行允许>,在各开始标签及结束标签之间,记述所对应的输入变量。
73.而且,同步参数读出部16b以图5所示的形式记述同步参数12f并存储于存储器12。这样,以使用了开始标签及结束标签的形式记述同步参数12f并存储于存储器12,由于该形式广泛普及,因此在显示辅助程序之外的程序中也容易利用同步参数12f。此外,在实施方式1中,以使用了开始标签及结束标签的形式记述同步参数12f并存储于存储器12,但记述形式并不限于使用了标签的记述形式,也可以设为使用了表格的记述形式,其是任意的。
74.图6是表示由实施方式1涉及的显示辅助系统1执行的机构图生成处理的流程图的图,图7示出通过执行该机构图生成处理而生成的机构图的一个例子。下面,同时参照图6及图7进行说明。
75.在创建或编辑了同步控制程序12d后,如果进行使用了输入装置13的规定的用户操作,则显示辅助系统1、详细而言构成控制部16的参数读出部16b、机构要素图选择部16c、机构图生成部16d、及显示控制部16e开始执行图6所示的机构图生成处理s1。
76.如果开始执行机构图生成处理s1,则参数读出部16b作为步骤s11的处理,与通用语言的种类相应地从同步控制程序12d读出同步参数12f。如果读出了同步参数12f,则作为步骤s12的处理,参数读出部16b将所读出的同步参数12f例如以图5所示的形式储存于存储器12。
77.接着,作为步骤s13的处理,机构要素图选择部16c基于在存储器12存储的同步参
数12f对机构要素图进行选择。在图7所示的例子中,由于同步参数12f包含“凸轮控制模块”及“齿轮控制模块”作为功能信息,因此,机构要素图选择部16c从机构要素图12c分别对与该功能信息对应的表示凸轮动作的机构要素图123b及表示齿轮动作的机构要素图123d进行选择。另外,由于同步参数12f包含主轴编号“m1”和从轴编号“s1”及“s2”,因此,机构要素图选择部16c从机构要素图12c分别对与这些识别编号对应的主轴“m1”的机构要素图123a、从轴“s1”的机构要素图123c、及从轴“s2”的机构要素图123e进行选择。此外,步骤s13的处理与机构要素图选择步骤相当。
78.接着,作为步骤s14的处理,机构图生成部16d基于同步参数12f,将在步骤s13中选择出的主轴的机构要素图全部配置。具体而言,机构图生成部16d在图7所示的例子中,作为主轴的机构要素图仅选择主轴“m1”的机构要素图123a,因此作为步骤s14的处理,配置主轴识别编号“m1”的机构要素图123a。
79.接着,作为步骤s15的处理,机构图生成部16d基于同步参数12f,配置表示同步关系的机构要素图、从轴的机构要素图,生成机构图。具体而言,在图7所示的例子中,作为执行顺序信息“1”的软件模块而存储了凸轮控制模块121,作为该凸轮控制模块121的输入变量而存储了主轴识别编号“m1”,作为该凸轮控制模块121的输入变量而存储了从轴识别编号“s1”(参照图5),因此,作为步骤s15的处理,机构图生成部16d将表示凸轮动作的机构要素图123b及从轴“s1”的机构要素图123c串联地配置于主轴编号“m1”的机构要素图123a。
80.另外,在图7所示的例子中,作为执行顺序信息“2”的软件模块而存储了齿轮控制模块122,作为该齿轮控制模块122的输入变量而存储了主轴识别编号“m1”,作为该齿轮控制模块122的输入变量而存储了从轴识别编号“s2”(参照图5),因此,作为步骤s15的处理,机构图生成部16d将表示齿轮动作的机构要素图123d及从轴“s2”的机构要素图123e串联地配置于主轴“m1”的机构要素图123a。
81.即,如图7所示,机构图生成部16d将表示凸轮动作的机构要素图123b及从轴“s1”的机构要素图123c、表示齿轮动作的机构要素图123d及从轴“s2”的机构要素图123e并联地配置于主轴“m1”的机构要素图123a。
82.此时,机构图生成部16d使得表示凸轮动作的机构要素图123b及从轴“s1”的机构要素图123c、表示齿轮动作的机构要素图123d及从轴“s2”的机构要素图123e成为与执行顺序相同的顺序,即,将执行顺序为“1”的表示凸轮动作的机构要素图123b及从轴“s1”的机构要素图123c配置为比执行顺序为“2”的表示齿轮动作的机构要素图123d及从轴“s2”的机构要素图123e靠左方。由此,机构图生成部16d生成图7所示的机构图12g,存储于存储器12。此外,步骤s14及s15的处理与机构图生成步骤相当。
83.接着,作为步骤s16的处理,显示控制部16e将在步骤s13~步骤s15的处理中生成的机构图显示于显示装置14的显示画面14a。此外,步骤s16的处理与显示步骤相当。
84.在以上说明过的实施方式1的显示辅助系统1中,根据由不专门用于同步控制的通用语言即fbd语言创建出的同步控制程序12d,生成表示主轴和从轴的同步关系的机构图12g,将该生成的机构图12g显示于显示装置14。由于在机构图12g的生成及显示时不需要用户操作,因此能够通过少的作业工时将同步控制程序12d中的主轴和从轴的同步关系可视化。
85.另外,在实施方式1的显示辅助系统1中,机构图生成部16d将构成同步控制程序
12d的、表示凸轮动作的机构要素图123b及从轴“s1”的机构要素图123c、表示齿轮动作的机构要素图123d及从轴“s2”的机构要素图123e以成为与执行顺序相同的顺序的方式配置,生成机构图12g。由此,不仅对于主轴和从轴的同步关系,而且对于软件模块的执行顺序,也能够通过少的作业工时实现可视化。
86.实施方式2.
87.在实施方式1中,显示辅助系统1根据对双轴的从轴相对于单轴的主轴的动作进行同步控制的电动机控制系统20的同步控制程序12d,自动地生成机构图12g。但是,作为机构图生成对象的同步控制程序并不限于此。在实施方式2中,根据对单轴的从轴相对于单轴的主轴的动作进行同步控制的电动机控制系统的同步控制程序,自动地生成机构图。参照图8~图11对该实施方式2进行说明。此外,实施方式2的显示辅助系统2具有以实施方式1的显示辅助系统1为基准的结构。因此,下面省略重复的说明。
88.图8是表示本发明的实施方式2涉及的显示辅助系统2的图,包含以有线方式与该显示辅助系统2可通信地连接的电动机控制系统20a的硬件结构。在实施方式2中,电动机控制系统20a从实施方式1的电动机控制系统20省略了第3电动机驱动器22c及第3电动机23c,将第1电动机23a设为成为动作基准的主轴,将第2电动机23b设为与第1电动机23a联动的从轴。另外,对于构成电动机控制系统20a的第1电动机23a及第2电动机23b,分配了用于对各自进行确定的识别编号“m1”及“s1”。另外,在实施方式2中,电动机控制系统20a也不具有凸轮及齿轮等机械要素,通过使第1电动机23a及第2电动机23b电联动,进行第1电动机23a及第2电动机23b的同步控制。因此,实施方式2的运动控制器21a执行与由实施方式1的运动控制器21执行的同步控制程序12d不同的同步控制程序22d。
89.图9是表示由实施方式2涉及的显示辅助系统2的用户新创建或编辑出的同步控制程序22d的一个例子的图。同步控制程序22d也与实施方式1的同步控制程序12d相同地,由不专门用于同步控制的通用语言的一个例子即fbd语言记述。
90.如图9所示,在同步控制程序22d中包含有:齿轮控制模块221,其为记述了齿轮动作的功能的软件模块;以及凸轮控制模块222,其为记述了凸轮动作的功能的软件模块,这些齿轮控制模块221及凸轮控制模块222在显示画面14a中以不在上下方向错开的方式排列配置于左右方向。
91.齿轮控制模块221将对成为动作基准的主轴进行确定的主轴识别编号221a、对与主轴联动的从轴进行确定的从轴识别编号221b、表示允许或不允许该齿轮控制模块221本身执行的信息即执行允许信息221c、表示用于对相对于主轴位置的从轴位置进行计算的比率的齿轮比的信息即齿轮比221d作为输入变量。另外,齿轮控制模块221将上述输入变量中的对主轴进行确定的主轴识别编号221a及对从轴进行确定的识别编号设为输出变量,与在后段连接的凸轮控制模块222接线。
92.凸轮控制模块222将对成为动作基准的主轴进行确定的主轴识别编号222a、对与主轴联动的从轴进行确定的从轴识别编号222b、表示允许或不允许该凸轮控制模块222本身执行的信息即执行允许信息222c、对多个凸轮曲线的种类进行确定的凸轮编号222d设为输入变量。此外,由于齿轮控制模块221及凸轮控制模块222如上所述地接线,因此对主轴进行确定的主轴识别编号222a与从齿轮控制模块221输出的主轴识别编号相同,对从轴进行确定的从轴识别编号222b与从齿轮控制模块221输出的从轴识别编号相同。
93.图10是表示在实施方式2涉及的显示辅助系统2中,从同步控制程序22d读出的同步参数向存储器12的储存形式的一个例子的图。如图10所示,从实施方式2的同步控制程序22d读出的同步参数22f在如下方面与之前图5所示的从实施方式1的同步控制程序12d读出的同步参数12f不同。即,在同步参数12f中,齿轮控制模块及凸轮控制模块的执行顺序各自为“2”及“1”,相对于此,在同步参数22f中,齿轮控制模块及凸轮控制模块的执行顺序各自为“1”及“2”,执行顺序相反。另外,在同步参数12f中,凸轮控制模块的从轴识别编号及齿轮控制模块的从轴识别编号各自为“s1”及“s2”,它们是不同的,相对于此,在同步参数22f中,齿轮控制模块和凸轮控制模块的从轴编号均为“s1”,它们是共通的。
94.在创建或编辑了上述同步控制程序22d后,如果进行使用了输入装置13的规定的用户操作,则显示辅助系统2开始执行之前图6所示的机构图生成处理s1。图11示出通过执行该机构图生成处理s1而生成的机构图的一个例子。下面,同时参照图6及图11进行说明。
95.如果开始执行机构图生成处理s1,则作为步骤s11的处理,参数读出部16b相应于通用语言的种类而从同步控制程序22d读出同步参数22f。如果读出了同步参数22f,则作为步骤s12的处理,参数读出部16b将所读出的同步参数22f例如以图10所示的形式储存于存储器12。此外,步骤s11的处理与参数读出步骤相当。
96.接着,作为步骤s13的处理,机构要素图选择部16c基于在存储器12存储的同步参数22f对机构要素图进行选择。在图11所示的例子中,由于在同步参数22f包含“齿轮控制模块”及“凸轮控制模块”作为功能信息,因此,机构要素图选择部16c从机构要素图12c分别对与该功能信息对应的、表示齿轮动作的机构要素图223b及表示凸轮动作的机构要素图223c进行选择。另外,由于在同步参数22f包含主轴编号“m1”及从轴编号“s1”,因此,机构要素图选择部16c从机构要素图12c分别对与这些识别编号对应的主轴“m1”的机构要素图223a及从轴“s1”的机构要素图223d进行选择。
97.接着,作为步骤s14的处理,机构图生成部16d基于同步参数22f,将在步骤s13中选择出的主轴的机构要素图全部配置。具体而言,在图11所示的例子中,作为主轴的机构要素图而仅选择主轴“m1”的机构要素图223a,因此,作为步骤s14的处理,机构图生成部16d对主轴识别编号“m1”的机构要素图223a进行配置。
98.接着,作为步骤s15的处理,机构图生成部16d基于同步参数22f,配置表示同步关系的机构要素图、从轴的机构要素图,生成机构图。具体而言,在图11所示的例子中,由于作为执行顺序信息“1”的软件模块而存储了齿轮控制模块221,作为该齿轮控制模块221的输入变量而存储了主轴识别编号“m1”,作为该齿轮控制模块221的输入变量而存储了从轴识别编号“s1”,另外,作为执行顺序信息“2”的软件模块而存储了凸轮控制模块222,作为该凸轮控制模块222的输入变量而存储了主轴识别编号“m1”,作为该凸轮控制模块222的输入变量而存储了从轴识别编号“s1”(参照图9),因此,作为步骤s15的处理,机构图生成部16d将表示齿轮动作的机构要素图223b、表示凸轮动作的机构要素图223c、及从轴“s1”的机构要素图223d串联地配置于主轴“m1”的机构要素图223a。
99.由此,机构图生成部16d生成图11所示的机构图22g。此时,机构图生成部16d使得表示齿轮动作的机构要素图223b、表示凸轮动作的机构要素图223c成为与执行顺序相同的顺序,即,将执行顺序为“1”的表示齿轮动作的机构要素图223b配置为比执行顺序为“2”的表示凸轮动作的机构要素图223d靠上方。由此,机构图生成部16d生成图11所示的机构图
22g,存储于存储器12。
100.在以上说明过的实施方式2的显示辅助系统2中,根据由不专门用于同步控制的通用语言即fbd语言创建出的同步控制程序22d,生成表示主轴和从轴的同步关系的机构图22g,将该生成的机构图22g显示于显示装置14。由于在机构图22g的生成及显示时不需要用户操作,因此能够通过少的作业工时将同步控制程序22d中的主轴和从轴的同步关系可视化。
101.另外,在实施方式2的显示辅助系统2中,机构图生成部16d也将构成同步控制程序12d的、表示齿轮动作的机构要素图223b、表示凸轮动作的机构要素图223c以成为与执行顺序相同的顺序的方式配置,生成机构图22g。由此,不仅对于主轴和从轴的同步关系,而且对于软件模块的执行顺序,也能够通过少的作业工时实现可视化。
102.在实施方式2中,在同步控制程序22d中,齿轮控制模块221及凸轮控制模块222进行了接线,但并非必须进行接线。如实施方式1那样,如果齿轮控制模块221的输入变量之一即主轴识别编号与凸轮控制模块222的输入变量之一即主轴识别编号一致,并且,齿轮控制模块221的输入变量之一即从轴识别编号与凸轮控制模块222的输入变量之一即从轴识别编号一致,则这些模块不需要进行接线。
103.实施方式3.
104.在实施方式1及2中,显示辅助系统1及2根据由作为不专门用于同步控制的通用语言的fbd语言记述的同步控制程序12d~22d,自动地生成机构图12g~22g。记述同步控制程序的通用语言并不限于fbd语言。在实施方式3中,显示辅助系统根据由作为不专门用于同步控制的通用语言的st语言记述的同步控制程序,自动地生成机构图。参照图12~图14对该实施方式3进行说明。
105.图12是表示实施方式3涉及的显示辅助系统3的图,包含以有线方式与该显示辅助系统3可通信地连接的电动机控制系统20b的硬件结构。实施方式3的显示辅助系统3具有以实施方式1的显示辅助系统1为基准的结构。但是,实施方式3的运动控制器21b执行与由实施方式1的运动控制器21执行的同步控制程序12d不同的同步控制程序32d。
106.图13是表示由实施方式3涉及的显示辅助系统3的用户新创建或编辑出的同步控制程序32d的一个例子的图。同步控制程序32d由不专门用于同步控制的通用语言的一个例子即st语言记述。
107.如图13所示,同步控制程序32d在第1行中调用齿轮控制模块,该齿轮控制模块是被称为gearcontrol的函数名的软件模块,在第2行中调用凸轮控制模块,该凸轮控制模块是被称为camcontrol的函数名的软件模块。
108.在由st语言创建出的程序中,所记述的顺序越早、即越是在上下方向上方记述的软件模块,执行顺序越早。因此,在图13所示的同步控制程序32d中,由于同步控制程序32d调用2个软件模块,齿轮控制模块与凸轮控制模块相比执行顺序早,因此,表示齿轮控制模块的执行顺序的信息即执行顺序信息为“1”,凸轮控制模块的执行顺序信息为“2”。在显示辅助系统3的用户利用st语言而创建了同步控制程序32d的情况下,用户不需要重新对各软件模块的执行顺序进行设定,能根据各软件模块的记述顺序自动地进行判断。
109.齿轮控制模块为记述齿轮动作的功能的软件模块,将对成为动作基准的主轴进行确定的识别编号、对与主轴联动的从轴进行确定的识别编号、及表示用于对相对于主轴位
置的从轴位置进行计算的比率的齿轮比的信息即齿轮比设为自变量。此外,在实施方式3中,由于将电动机控制系统20b(图12)的第1电动机23a设为主轴,将第2电动机23b设为从轴,因此,将第1电动机23a的识别编号即“m1”设定为主轴编号,将第2电动机23b的识别编号即“s1”设定为从轴编号。另外,在实施方式3中,由于相对于电动机控制系统20b(图12)的设为主轴的第1电动机23a,设为从轴的第3电动机23c以齿轮比“2”被同步控制,因此齿轮比被设定为“2”。
110.凸轮控制模块为记述凸轮动作的功能的软件模块,将对成为动作基准的主轴进行确定的识别编号、对与主轴联动的从轴进行确定的识别编号、对多个凸轮曲线的种类进行确定的凸轮编号设为自变量。此外,在实施方式3中,由于将电动机控制系统20b(图12)的第1电动机23a设为主轴,将第3电动机23c设为从轴,因此,将第1电动机23a的识别编号即“m1”设定为主轴识别编号,将第3电动机23c的识别编号即“s2”设定为从轴识别编号。另外,在实施方式3中,由于相对于电动机控制系统20b(图12)的设为主轴的第1电动机23a,设为从轴的第3电动机23c例如一边按照正弦曲线进行动作一边进行同步控制,因此凸轮编号被设定为与“正弦曲线”对应的编号即“1”。
111.在创建或编辑了上述同步控制程序32d后,如果进行使用了输入装置13的规定的用户操作,则显示辅助系统3开始执行之前图6所示的机构图生成处理s1。图14示出通过执行该机构图生成处理s1而生成的机构图的一个例子。下面,同时参照图6及图14进行说明。
112.如果开始执行机构图生成处理s1,则参数读出部16b作为步骤s11的处理,与通用语言的种类相应地从同步控制程序32d读出同步参数32f。如果读出了同步参数32f,则作为步骤s12的处理,参数读出部16b将读出的同步参数32f例如以图14所示的形式储存于存储器12。
113.接着,作为步骤s13的处理,机构要素图选择部16c基于在存储器12存储的同步参数32f对机构要素图进行选择。在图15所示的例子中,由于在同步参数32f包含“齿轮控制模块”及“凸轮控制模块”作为功能信息,因此,机构要素图选择部16c从机构要素图12c分别对与该功能信息对应的、表示齿轮动作的机构要素图321b及表示凸轮动作的机构要素图321d进行选择。另外,由于在同步参数32f包含主轴编号“m1”、从轴编号“s1”、及从轴编号“s2”,因此,机构要素图选择部16c从机构要素图12c分别对与这些识别编号对应的主轴“m1”的机构要素图223a、从轴“s1”的机构要素图223d、及从轴“s2”的机构要素图223e进行选择。
114.接着,作为步骤s14的处理,机构图生成部16d基于同步参数32f,将在步骤s13中选择出的主轴的机构要素图全部配置。具体而言,在图15所示的例子中,作为主轴的机构要素图而仅选择主轴“m1”的机构要素图321a,因此,作为步骤s14的处理,机构图生成部16d对主轴识别编号“m1”的机构要素图321a进行配置。
115.接着,作为步骤s15的处理,机构图生成部16d基于同步参数32f,对表示同步关系的机构要素图、从轴的机构要素图进行配置,生成机构图。
116.具体而言,在图15所示的例子中,由于作为执行顺序信息“1”的软件模块而存储了齿轮控制模块,作为该齿轮控制模块的自变量而存储了主轴识别编号“m1”,作为该齿轮控制模块的自变量而存储了从轴识别编号“s1”,另外,作为执行顺序信息“2”的软件模块而存储了凸轮控制模块,作为该凸轮控制模块的自变量而存储了主轴识别编号“m1”,作为该凸轮控制模块的自变量而存储了从轴识别编号“s1”(参照图13),因此,作为步骤s15的处理,
机构图生成部16d将表示齿轮动作的机构要素图321b及从轴“s1”的机构要素图321c串联地配置于主轴“m1”的机构要素图321a。
117.另外,在图15所示例子中,作为执行顺序信息“2”的软件模块而存储了凸轮控制模块,作为该凸轮控制模块的自变量而存储了主轴识别编号“m1”,作为该凸轮控制模块的自变量而存储了从轴识别编号“s2”(参照图14),因此,作为步骤s15的处理,机构图生成部16d将表示凸轮动作的机构要素图321d及从轴“s2”的机构要素图321e串联地配置于主轴“m1”的机构要素图321a。
118.即,如图15所示,机构图生成部16d将表示齿轮动作的机构要素图321b及从轴“s1”的机构要素图321c、表示凸轮动作的机构要素图321d及从轴“s2”的机构要素图321e并联地配置于主轴“m1”的机构要素图321a。
119.此时,机构图生成部16d使得表示齿轮动作的机构要素图321b及从轴“s1”的机构要素图321c、表示凸轮动作的机构要素图321d及从轴“s2”的机构要素图321e成为与执行顺序相同的顺序,即,将执行顺序为“1”的表示齿轮动作的机构要素图321b及从轴“s1”的机构要素图321c配置为比执行顺序为“2”的表示凸轮动作的机构要素图321d及从轴“s2”的机构要素图321e靠上下方向上方。由此,机构图生成部16d生成图15所示的机构图32g,存储于存储器12。
120.在以上说明过的实施方式3的显示辅助系统3中,也根据由不专门用于同步控制的通用语言即st语言创建出的同步控制程序32d,生成表示主轴和从轴的同步关系的机构图32g,将该生成的机构图32g显示于显示装置14。由于在机构图32g的生成及显示时不需要用户操作,因此,能够通过少的作业工时将同步控制程序32d中的主轴和从轴的同步关系可视化。
121.另外,在实施方式3的显示辅助系统3中,机构图生成部16d也将构成同步控制程序32d的表示齿轮动作的机构要素图321b、表示凸轮动作的机构要素图321d以成为与执行顺序相同的顺序的方式配置,生成机构图32g。由此,不仅对于主轴和从轴的同步关系,而且对于软件模块的执行顺序,也能够通过少的作业工时实现可视化。
122.实施方式4.
123.在实施方式1~3中,在电动机控制系统20~20b中根据不处于执行中的同步控制程序12d~32d,自动地生成机构图12g~32g。但是,作为机构图的生成对象的同步控制程序并不限于此。在实施方式4中,在电动机控制系统中根据执行中的同步控制程序,自动地生成机构图。参照图16~图20对该实施方式4进行说明。此外,实施方式4的显示辅助系统及电动机控制系统也具有以实施方式1的显示辅助系统1及电动机控制系统20为基准的结构,因此省略重复的说明。
124.图16是表示本发明的实施方式4涉及的显示辅助系统4的图,包含以有线方式与该显示辅助系统4可通信地连接的电动机控制系统20c的硬件结构。实施方式4的运动控制器21c执行与通过实施方式1的运动控制器21而执行的同步控制程序12d不同的同步控制程序42d。实施方式4的显示辅助系统4与显示辅助系统1不同,对电动机控制系统20c的动作进行监视,在运动控制器21c执行同步控制程序42d期间,以规定的时间间隔(下面,也称为第1时间间隔),从该运动控制器21c读出后述的同步参数42f1及42f2,生成机构图42g1及42g2。
125.图17是表示由实施方式4涉及的显示辅助系统4的用户新创建或编辑出的同步控
制程序42d的一个例子的图。同步控制程序42d也与实施方式1的同步控制程序12d及实施方式2的同步控制程序22d相同地,由不专门用于同步控制的通用语言的一个例子即fbd语言记述。
126.如图17所示,在同步控制程序42d中包含:计时器模块421;凸轮控制模块422,其为记述了凸轮动作的功能的软件模块;以及齿轮控制模块423,其为记述了齿轮动作的功能的软件模块。计时器模块421在显示画面14a中配置于最左上的位置,凸轮控制模块422及齿轮控制模块423在显示画面14a中以不在左右方向错开的方式排列地配置于上下方向。
127.计时器模块421例如是从运动控制器21c开始执行同步控制程序42d的时间点至达到规定时间(下面,也称为第2时间间隔)为止输出off、在经过第2规定时间间隔以后输出on的模块。计时器模块421与在后段连接的齿轮控制模块423接线。顺带提及,第1时间间隔设定得比第2时间间隔短。
128.凸轮控制模块422将对成为动作基准的主轴进行确定的主轴识别编号422a、对与主轴联动的从轴进行确定的从轴识别编号422b、表示允许或不允许该凸轮控制模块422本身执行的信息即执行允许信息422c、对多个凸轮曲线的种类进行确定的凸轮编号422d作为输入变量。此外,在本实施方式4中,由于电动机控制系统20c将第1电动机23a设为主轴,将第2电动机23b设为从轴,一边使它们始终进行凸轮动作一边进行同步控制,因此执行允许信息422c被设定为“on”。
129.齿轮控制模块423将对成为动作基准的主轴进行确定的主轴识别编号423a、对与主轴联动的从轴进行确定的从轴识别编号423b、表示允许或不允许该齿轮控制模块423本身执行的信息即执行允许信息423c、表示用于对相对于主轴位置的从轴位置进行计算的比率的齿轮比的信息即齿轮比423d作为输入变量。此外,在本实施方式4中,由于齿轮控制模块423与计时器模块421如上所述地进行接线,因此执行允许信息423c被设定为“off”或“on”。
130.即,在实施方式4中,如果电动机控制系统20c执行同步控制程序42d,则从开始执行同步控制程序42d至到达第2规定时间为止,将第1电动机23a设为主轴,将第2电动机23b设为从轴,一边使它们进行凸轮动作一边进行同步控制。另外,电动机控制系统20c在从开始执行同步控制程序42d起经过了第2规定时间以后,将第1电动机23a设为主轴,将第2电动机23b设为从轴,一边使它们进行凸轮动作一边进行同步控制,并且将第1电动机23a设为主轴,将第3电动机23c设为从轴,一边使它们进行凸轮动作一边进行同步控制。
131.在电动机控制系统20c执行同步控制程序42d过程中,如果进行使用了输入装置13的规定用户操作,则显示辅助系统3开始执行图18所示的机构图生成处理s2。图19(a)及(b)示出通过执行该机构图生成处理s2而从同步控制程序42d读出的同步参数42f1及42f2的一个例子,图20(a)及(b)示出通过执行该机构图生成处理s2而生成的机构图42g1及42g2的一个例子。下面,同时参照图18、图19(a)及(b)、以及图20(a)及(b)进行说明。此外,在从电动机控制系统20c开始执行同步控制程序42d的时间点至还未经过上述第2时间间隔的时间点进行用户操作,至经过上述第2时间间隔为止,至少执行1次机构图生成处理s2。
132.如果开始执行机构图生成处理s2,则显示辅助系统4执行通过之前图6说明过的步骤s11~步骤s16的处理,作为之后的步骤s27的处理,对是否从开始执行步骤s11~步骤s16的处理的时间点起经过了上述第1时间间隔进行判断。在未经过上述第1时间间隔的情况下
(步骤s27的处理中“no”),显示辅助系统4再次执行步骤s27的处理,在经过了上述第1时间间隔的情况下(步骤s27的处理中“yes”),显示辅助系统4再次执行步骤s11~步骤s16的处理。即,显示辅助系统4以第1时间间隔为单位周期性地执行步骤s11~步骤s16的处理。
133.图19(a)是在显示辅助系统4中,从电动机控制系统20c开始执行同步控制程序42d至经过第2时间间隔为止,通过电动机控制系统20c从执行中的同步控制程序42d读出的同步参数42f1,图20(a)是基于上述同步参数42f1而生成的机构图42g1。
134.如图19(a)所示,由于从计时器模块421输出off,因此,在同步参数42f1中,齿轮控制模块的执行允许信息为“off”。因此,如图19(a)所示,生成表示凸轮动作的机构要素图424b及从轴“s1”的机构要素图424c串联地配置于主轴“m1”的机构要素图424a的机构图42g1,显示于显示装置14的显示画面14a。
135.图19(b)是在显示辅助系统4中,从电动机控制系统20c开始执行同步控制程序42d起经过了第2时间间隔以后,电动机控制系统20c从执行中的同步控制程序42d读出的同步参数42f2,图20(b)是基于上述同步参数42f2而生成的机构图42g2。
136.如图19(b)所示,由于从计时器模块421输出on,因此,在同步参数42f2中,齿轮控制模块的执行允许信息为“on”。因此,如图20(b)所示,生成将表示凸轮动作的机构要素图424b及从轴“s1”的机构要素图424c、表示齿轮动作的机构要素图424d及从轴“s2”的机构要素图424e并联地配置于主轴“m1”的机构要素图424a的机构图42g2,显示于显示装置14的显示画面14a。
137.在以上说明过的实施方式4的显示辅助系统4中,在通过电动机控制系统20c执行的期间读出由不专门用于同步控制的通用语言即fbd语言创建出的同步控制程序42d,根据该同步控制程序42d而生成表示主轴和从轴的同步关系的机构图42g1及42g2,将该生成的机构图42g1及42g显示于显示装置14。由于在机构图42g1及42g2的生成及显示时不需要用户操作,因此能够反映同步参数42f1及42f2的变化,并且通过少的作业工时将同步控制程序42d中的主轴和从轴的同步关系可视化。
138.另外,在实施方式4的显示辅助系统4中,与实施方式1的显示辅助系统1及实施方式2的显示辅助系统2相同地,机构图生成部16d将构成同步控制程序42d的表示凸轮动作的机构要素图424b、表示齿轮动作的机构要素图424d以成为与执行顺序相同的顺序的方式配置,生成机构图42g2。由此,不仅对于主轴和从轴的同步关系,而且对于软件模块的执行顺序,也能够通过少的作业工时实现可视化。
139.在实施方式4的显示辅助系统4中,同步控制程序42d所包含的软件模块中的齿轮控制模块423的执行允许信息产生了变更,但并不限于该结构,也可以是同步控制程序42d所包含的软件模块中的凸轮控制模块422的执行允许信息产生变更。或者,也可以是如在实施方式2中说明过的那样的齿轮控制模块及凸轮控制模块串联地接线,其中的齿轮控制模块或凸轮控制模块的执行允许信息产生变更的结构。
140.在实施方式4的显示辅助系统4中,对电动机控制系统20c的动作进行监视,在运动控制器21c执行同步控制程序42d期间,以第1时间间隔周期性地从该运动控制器21c读出同步参数42f1及42f2,生成了机构图42g1及42g2,但并不限于该结构。除此以外例如,也可以在基于用户操作所指示的任意定时,从运动控制器21c读出同步参数,生成机构图。或者,也可以是在显示辅助系统4中执行任意其它处理,在其它处理的间隙,从运动控制器21c读出
同步参数,生成机构图。
141.在实施方式4的显示辅助系统4中,通过运动控制器21c而实际执行了同步控制程序42d,但并不限于该结构。除此以外例如,也可以通过对运动控制器21c的动作进行模拟的模拟器而执行同步控制程序42d。
142.实施方式5.
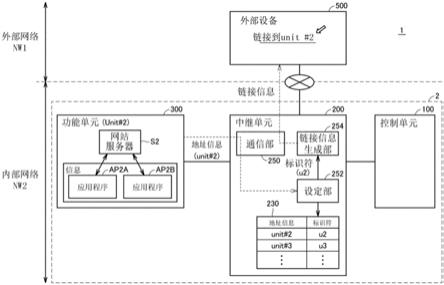
143.在实施方式1~4中,显示辅助系统1~4通过将显示辅助程序安装于计算机而实现,但并不限于该结构。在实施方式5中,通过将显示辅助程序安装于服务器
‑
客户端系统而实现。参照图21对实施方式5进行说明。
144.图21是表示本发明的实施方式5涉及的显示辅助系统5的结构的图。如图21所示,显示辅助系统5构成为具有计算机17、显示装置18、服务器19。
145.计算机17具有以实施方式1~3的显示辅助系统1~3的计算机10为基准的结构。即,计算机17能够通过安装显示辅助程序而生成机构图。另外,计算机17设定为服务器19的客户端,能够通过无线的方式与服务器19进行通信。计算机17将由该计算机17生成的机构图存储于服务器19的未图示的存储器。
146.显示装置18例如由智能电话、平板终端等构成。显示装置18设定为服务器19的客户端,能够通过无线的方式与服务器19进行通信。显示装置18对服务器19发送请求,以将在该服务器19存储的机构图发送至显示装置18,将从服务器19发送来的机构图显示于显示画面18a。
147.服务器19如果从设定为该服务器19的客户端的计算机17接收到机构图,则将该机构图存储于未图示的存储器。另外,服务器19如果接收到来自设定为该服务器19的客户端的显示装置18的请求,则将在存储器存储的机构图发送至显示装置18。
148.根据以上说明过的实施方式5的显示辅助系统5,在通过显示装置18的外部的计算机17而生成了表示主轴和从轴的同步关系的机构图的情况下,也能够通过显示装置18将同步关系可视化。
149.此外,在实施方式5中,计算机17及显示装置18被设定为服务器19的客户端,但并不限于该结构,也可以省略计算机17。在该情况下,服务器19执行机构图生成处理。
150.在上述实施方式1~5的显示辅助系统1~5中,以由不专门用于同步控制的通用语言即fbd语言或st语言记述的同步控制程序为对象而自动地生成了机构图,但同步控制程序的记述语言并不限于fbd语言或st语言。除此以外例如,也可以以由梯形图语言、c语言、sfc语言等通用语言记述的同步控制程序为对象而自动地生成机构图。总之,只要是记述凸轮动作、齿轮动作等、同步关系的软件模块的可调用语言即可。
151.在上述实施方式1~5的显示辅助系统中,作为主轴的机构要素图而采用了旋转型电动机的绘图,但主轴的机构要素图的绘图不限于此。例如,可以采用线性电动机的绘图,在控制从轴与编码器等的输出值进行同步控制的情况下,也可以采用编码器的绘图。相同地,从轴的绘图也不限于本实施方式所示的绘图。
152.在上述实施方式1~5的显示辅助系统1~5中,作为表示同步关系的机构要素图,使用了表示凸轮动作的机构要素图和表示齿轮动作的机构要素图,但并不限于表示同步关系的机构要素图。例如,也可以使用表示用于在使主轴旋转的状态下使从轴平滑地停止的离合器动作的机构要素图、表示以双轴的主轴的位置信息的差分作为从轴的动作指令的差
动动作的机构要素图等。此外,图22及图23分别是表示与表示离合器动作的机构要素图对应的离合器控制模块及与表示差动动作的机构要素图对应的差动控制模块的一个例子的图。
153.工业实用性
154.本发明适于实现生成结构图的显示辅助程序、存储有该程序的计算机可读存储介质、显示辅助方法及显示辅助系统,该结构图将由不专门用于同步控制的通用语言创建出的同步控制程序中的主轴和从轴的同步关系可视化。
155.标号的说明
156.1~5显示辅助系统,10、17计算机,11处理器,12存储器(同步控制程序存储部、机构要素图存储部),12a创建辅助程序,12b显示辅助程序,12c机构要素图,12d~42d同步控制程序,12e识别编号,12f同步参数,12g~42g2机构图,13输入装置,14、18显示装置,14a、18a显示画面(显示部),15通信装置,16控制部,16a程序创建部,16b参数读出部,16c机构要素图选择部,16d机构图生成部,16e显示控制部,16f通信控制部,19服务器,20~20c电动机控制系统,21~21c运动控制器,22a~22c电动机驱动器,23a第1电动机,23b第2电动机,23c第3电动机,121、222、321、422凸轮控制模块,121a、222a、221a、202a、422a、423a主轴识别编号,121b、222b、221b、202b、422b、423b从轴识别编号,121c、222c、221c、202c、422c、423c执行允许信息,121d、222d、422d凸轮编号,122、221、423齿轮控制模块,122d、221d、423d齿轮比,123a~123e、223a~223d、321a~321e、424a~424e、621a~622a机构要素图,421计时器模块,621离合器控制模块,622差动控制模块。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。