1.本发明涉及煤矿采掘机械技术领域,尤其是一种滚筒式采煤机的自动调高控制方法。
背景技术:
2.目前,煤矿井下综采工作面采煤机大部分都是人工手动操作,由采煤机司机人眼识别煤岩界面结合操纵经验控制采煤机调高手柄或者按扭对采煤机摇臂进行升降调高,由于井下工况复杂,工作面粉层较大,司机难以准确控制采煤机滚筒沿着煤岩界面割煤,在采煤机截煤过程中,滚筒高于煤岩界面运行时,滚筒截割顶板导致煤炭中含矸量增多,降低煤炭质量,此外截割顶板导致调高机构以及截齿易受负载冲击,增加设备损耗;滚筒低于煤岩界面运行时,导致截割后仍有大量剩煤,降低采煤效率,国内外少数先进采煤机厂家采用记忆切割控制滚筒自动调高,在自动切割之前,首先由人工控制采煤机空载运行一次,将运行轨迹保存,以此作为采煤机滚筒进行轨迹跟踪的目标,但由于采煤机调高系统大惯性滞后性的特性,滚筒难以沿着煤岩界面自动截割。
3.中国专利文献cn104790948a公开了一种基于负载压力变化的采煤机滚筒自动调高方法,该方法采用连接在采煤机调高油缸无杆腔管路接头和有杆腔管路接头处的压力传感器检测油缸受到的压力信号,由此计算出调高油缸的负载压力和负载压力的变化率,并以负载压力和负载压力变化率为输入,电液比例阀的控制信号作为输出设计了模糊规则,模糊控制器计算出电液比例阀的控制信号,实现对调高油缸的自动控制,该方法通过压力传感器间接测量油缸负载压力,但油缸负载压力不仅和滚筒截割煤、岩有关,采煤机牵引速度变化、滚筒调高等都会造成油缸负载变化,因此很容易造成滚筒调高不准确,其精度无法保证。
4.中国专利文献cn103216233a公开了一种基于截割电机电流变化的采煤机自动调高方法,该方法由工人示范割第一刀,由安装在截割电机的电流传感器记录截割煤层和岩层的电流值分布,将此电流值作为界定煤层与岩层的依据,通过检测截割电机的电流波动范围,识别煤岩层,实现采煤机滚筒的自动调整,该方法可以控制采煤机滚筒沿着煤岩界面自动调整,提高采出率,但井下作业环境复杂,其自动调高的控制精度难以保证。
5.因此,亟需设计一种受外界干扰小,调高控制精度高的采煤机滚筒自动调高的控制方法。
技术实现要素:
6.针对上述现有技术的不足,本发明提供一种采煤机滚筒自动调高的控制方法,其技术方案如下。
7.一种采煤机滚筒自动调高的控制方法,本控制方法包括由预见补偿模糊免疫pid控制器、数据采集装置、滚筒高度检测单元和电液比例阀组成的控制系统,其中,所述滚筒高度检测单元,包括但不限于安装于摇臂处的倾角传感器;所述数据采集装置与预见补偿
模糊免疫pid控制器连接,所述预见补偿模糊免疫pid控制器和电液比例阀连接;本控制方法包括信号采集、数据处理、预见补偿模糊免疫pid运算、指令输出,其中:(1)信号采集:所述倾角传感器测量摇臂倾角信号并将摇臂倾角信号传输给数据采集装置,所述数据采集装置对倾角信号滤波处理后得到摇臂的倾角原始数据,并将倾角原始数据传输给控制器。
8.(2)数据处理:所述预见模糊免疫pid控制器的内部程序根据接收的倾角原始数据计算出滚筒当前的高度信息,并根据采煤机实时高度信息与滚筒高度目标值计算调高误差大小;根据煤岩界面信息,计算当前时刻到未来mr步的滚筒高度目标值与前一项目标值的差值。
9.(3)预见补偿模糊免疫pid运算:所述预见补偿模糊免疫pid控制器,根据步骤(2)计算出的滚筒高度误差,采用模糊免疫pid控制算法修正当前的pid控制参数,并计算出模糊免疫pid控制器输出的调高控制量,其运算结果作为模糊免疫pid控制器的输出结果;预见补偿环节根据当前时刻到未来m
r
步的目标值的差值信息计算补偿控制量。
10.(4)指令输出:所述指令输出信号为电液比例阀的控制信号,所述控制信号由模糊免疫pid控制器输出与预见补偿环节的补偿控制量输出两部分叠加而成,所述控制信号通过改变电液比例阀的开口大小和方向改变调高油缸的运动方向,实现对滚筒的自动调高控制。
11.进一步地,步骤(1)中,所述滤波处理指数据采集装置连续采集2n
‑
1个倾角传感器的角度数据,并将采集的所有角度数据与第n个角度数据相减,如果得到误差的绝对值小于φ的个数大于n,则认为滚筒高度未发生变化,倾角变化原因是因为摇臂振动等干扰造成的,仍然以上次角度输出数据作为当前角度输出数据,否则,将第n个角度数据作为角度输出数据。
12.进一步地,步骤(3)中所述模糊免疫pid控制的机理如下:在生物免疫系统中,病原体入侵机体并被吞噬后,会产生特异th和ts细胞,刺激b细胞活化产生抗体以消除抗原,其中th细胞促进b细胞活化产生抗体,ts细胞对th细胞以及b细胞有抑制作用,在免疫系统初期,抗原浓度较大,机体内的ts细胞少,th细胞增多,刺激b细胞活化产生更多的抗体;随着抗原浓度减少,体内ts细胞增多,抑制th细胞和b细胞,抗体随之减少,经过一段时间免疫系统趋于平衡。
13.第k代抗原数量为ε(k),ts细胞和th细胞受到免疫反应后,输出分别为ts(k)和th(k),b细胞接受刺激影响为s(k),则有:式中,th(k)=k1*ε(k), ts(k)=k2*f(s(k))*ε(k),其中f(δs(k))*ε(k)为非线性函数,因此以抗原数量ε(k)作为采煤机调高系统滚筒目标值与实际高度误差e(k),b细胞接受刺激影响s(k)作为采煤机调高系统模糊免疫pid调高控制量输出u1(k),可以得出模糊免疫pid控制器输出控制量如下:
式中,k
p1
、k
i
、k
d
分别为pid的比例系数、积分系数和微分系数,e(k)为调高误差,u1(k)为模糊免疫pid控制器输出信号,u(k)、δu(k)为预见补偿模糊免疫pid控制器输出信号以及输出信号的变化率,k为控制反应速度,η为控制稳定效果,f(u(k),δu(k))为利用模糊控制器设计的非线性函数。
14.非线性函数f(u(k),δu(k))设计如下:将f(u(k),δu(k))的输入变量u(k),δu(k)模糊化为正(p)、负(n)两个模糊集,输出量模糊化为正(p)、零(z)、负(n)三个模糊集,定义隶属度函数区间为(0,1),模糊控制器采用以下四条规则:a)ifuispandδuispthenf(u,δu)isnb)ifuispandδuisnthenf(u,δu)iszc)ifuisnandδuispthenf(u,δu)iszd)ifuisnandδuisnthenf(u,δu)isp模糊控制器采用重心法解模糊,最终计算得到模糊免疫pid输出控制号。
15.进一步地,步骤(3)中所述的预见补偿环节控制补偿量求解公式如下:式中m
r
为预见补偿步数,δr(k j)为煤岩界面未来第k j项目标值与前一项目标值的差值,对应的系数f
r
(j)的值由实验确定,从而保证补偿效果最佳。
16.本发明引入模糊免疫pid算法,能自适应调整pid参数,明显减小系统的超调量,加快系统的响应速度;同时增加预见补偿环节,根据煤岩界面信息,对调高系统的调高控制量进行补偿,提高采煤机调高系统的动态性能。
17.本方法具有改善采煤机滚筒调高控制系统的控制速度和精度,有助于优化调高系统滞后性问题,解决由于采煤机滚筒不能及时调高而造成滚筒过高截割煤岩以及滚筒过低有剩煤浪费的问题,提高滚筒式采煤机的采出效率,具体的有益效果如下:1、本发明提出了一种角度滤波算法,使得采煤机滚筒摇臂倾角测量更精准,有助于减缓摇臂测量倾角受系统抖动或者传感器零漂带来的误差。
18.2、本发明提出了一种pid参数自适应算法,对于时变大滞后调高系统,模糊免疫参数自整定pid控制能明显减小系统的超调量,加快系统的响应速度,改善采煤机滚筒调高控制的动态性能,提高采煤机滚筒的路径跟踪性能,使得调高系统具有较强的鲁棒性。
19.3、本发明提出了一种预见补偿调高控制方法,根据工作面煤岩界面的信息,采用预见控制方法对调高控制量进行补偿,提高调高系统的灵敏性,减小调高系统的调高误差。
20.4、本发明采煤机滚筒自动调高控制方法能够提高采煤效率;降低煤炭中的矸石含量;减小设备损耗;同时降低了人工作业,提升了采煤机自动化程度,具有良好的社会经济效益。
附图说明
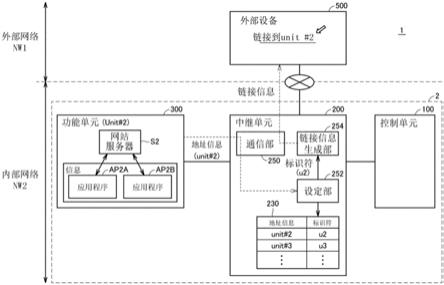
21.图1是本发明中控制系统的连接关系示意图。
22.图2是本发明采煤机滚筒自动调高控制方法流程图。
23.图3是非线性函数f(u, δu)中输入u、du的隶属度函数。
24.图4是非线性函数f(u, δu)输出f(u, δu)的隶属度函数。
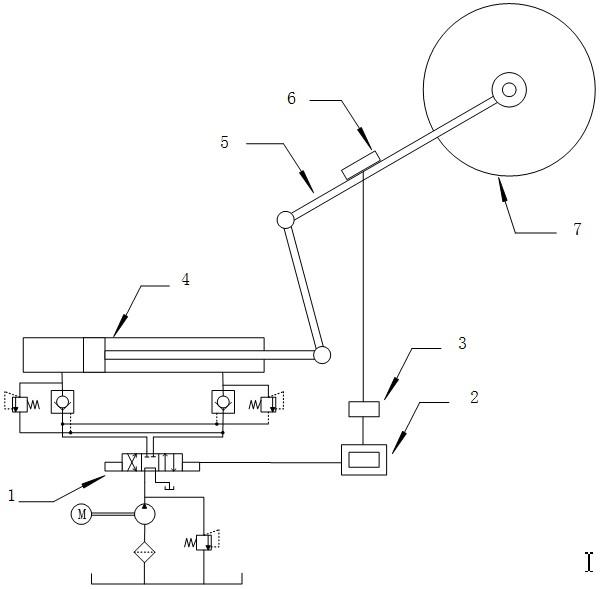
25.其中:1、电液比例阀,2、预见补偿模糊免疫控制器,3、数据采集装置,4、调高油缸,5、摇臂,6、倾角传感器,7滚筒。
具体实施方式
26.下面结合附图1和附图2对本发明的具体实施方式作进一步的说明,但不限于此。
27.如附图1至附图4所示,本发明提供的一种采煤机滚筒自动调高的控制方法,该控制方法主要包括由电液比例阀1,预见补偿模糊免疫pid控制器2、数据采集装置3和倾角传感器6和组成的控制系统。其中倾角传感器6安装在采煤机摇臂5上,电液比例阀1安装在调高液压回路上,数据采集装置3与预见补偿模糊免疫pid控制器2连接,预见补偿模糊免疫pid控制器2与电液比例阀1连接,预见补偿模糊免疫pid控制器2的输出信号控制电液比例阀1的电流,电流的大小可以改变电液比例阀1的开口大小和方向,从而改变调高油缸4的位移速度和方向,实现对滚筒7的调高控制。
28.本实施例提供的采煤机滚筒自动调高的控制方法,倾角传感器6通过信号线与数据采集装置3连接,数据采集装置3将所有传感器信号发送给控制器2,控制器2根据事先编写的预见补偿模糊免疫pid控制程序,当接收到倾角传感器6的信号后,结合采煤机姿态计算滚筒7当前高度,并根据滚筒7高度的目标值计算滚筒高度误差,再经过模糊免疫pid运算以及预见补偿运算得到电液比例阀1的控制电流信号,进而改变调高油缸4位移量,带动采煤机摇臂5运动,实现对摇臂5前端滚筒7的调高控制,该控制方法具体包括信号采集、数据处理、预见补偿模糊免疫pid运算、指令输出,其中:(1)信号采集:所述倾角传感器6测量摇臂的倾角信号并将摇臂倾角信号传输给数据采集装置3,数据采集装置连续采集2n
‑
1个倾角传感器的角度数据,并将采集的所有角度数据与第n个角度数据相减,如果得到误差的绝对值小于φ的个数大于等于n,则认为滚筒高度未发生变化,倾角变化原因是因为摇臂振动等干扰造成的,仍然以上次角度输出数据作为当前角度输出数据,否则,将第n个角度数据作为角度输出数据,并将倾角原始数据传输给控制器2。
29.例如,连续获取7个倾角数据分别为16.82、16.75、16.75、16.50、16.32、16.48、15.82,上次角度输出数据为16.62,取误差范围绝对值φ为0.2,n取4,则误差绝对值在0.2范围内的个数为4等于n,则当前倾角输出值仍为16.62;若连续获取7个倾角数据分别为16.82、16.75、16.75、16.50、16.32、16.48、15.82,上次角度输出数据为16.72,取误差范围绝对值φ为0.2,n取4,则误差绝对值在0.2范围内的个数为3小于n,此时倾角输出数据为第
四个数据16.50。
30.(2)数据处理:控制器内部的数据处理程序根据倾角传感器6信息,采煤机姿态信息计算滚筒目标值与实际高度误差e(k)以及误差变化e(k)
‑
e(k
‑
1),并根据以及煤岩界面信息计算当前时刻到未来m
r
步的滚筒高度目标值与前一项目标值的差值δr(k 1)、δr(k 2)
···
δr(k m
r
)。
31.(3)预见补偿模糊免疫pid运算:定义模糊控制器中输入信号u和δu的论域为[0,1],将控制信号输出u和控制信号输出变化率δu的范围进行区间转化。例如[a,b]为模糊量的实际变化范围,采用转换求解式子y=(x
‑
a)/(b
‑
a),x为[a,b]中的一个值,y为将x转化到区间[0,1]所对应的值。然后根据四条模糊规则得到模糊运算结果,并采用重心法解模糊求解,带入下式求得到pid修正后的参数。
[0032]
再根据优化后的pid参数代入下式,求得模糊免疫pid控制器控制量输出:选取合适的预见补偿系数以及预见步数m
r
,预见补偿环节根据煤岩界面信息计算调高补偿量,例如从当前时刻到未来k步的煤岩界面曲线是上升的,则δr(k 1)、δr(k 2)
···
δr(k m
r
)都为正值,带入下式求解补偿控制量输出:显然u2为正值使预见补偿模糊免疫pid控制器输出值增大,加快采煤机滚筒的调高速度,可以有效减小采煤机滚筒在下一时刻的误差。
[0033]
(4)指令输出:控制器输出控制信号驱动电液比例阀阀芯运动,从而控制进出调高油缸的流量,从而改变调高油缸的位移,带动采煤机摇臂运动,实现对摇臂前端滚筒的调高控制。预见补偿模糊免疫pid控制器输出信号由两部分组成,分别为模糊免疫pid输出u1(k)以及补偿控制量输出u2(k),控制器输出调高控制量的大小为:本实施例中控制系统设计合理,针对采煤机大惯性滞后特点,通过智能化控制方法,在不需要建立采煤机调高系统精确模型的情况下,利用煤岩界面信息补偿调高控制量,利用模糊免疫pid控制器自适应pid最优控制参数,有效调高了采煤机调高系统的抗干扰能力和动态性能,减小了调高系统的误差,调高采煤效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。