1.本实用新型涉及焊接机器人技术领域,具体为一种便于清理残渣的焊接机器人。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围,现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等。除了在工厂中使用外,焊接还可以在多种环境下进行,如野外、水下和太空。
3.市场上的焊接机器人使用时虽能够进行焊接,但焊接过程中会产生有毒气体,从而对工作人员的身体带来危害,并且部分机器人虽能够进行对残渣进行清理,但无法对其进行分类进行清理,从而使得装置的实用性降低的问题,为此,我们提出一种便于清理残渣的焊接机器人。
技术实现要素:
4.本实用新型的目的在于提供一种便于清理残渣的焊接机器人,以解决上述背景技术中提出的市场上的焊接机器人使用时虽能够进行焊接,但焊接过程中会产生有毒气体,从而对工作人员的身体带来危害,并且部分机器人虽能够进行对残渣进行清理,但无法对其进行分类进行清理,从而使得装置的实用性降低的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种便于清理残渣的焊接机器人,包括主体和收集罩,所述主体的上表面设置有工作台,且工作台的上端固定有焊接结构,所述焊接结构的输出端设置有夹持机构,且夹持机构的内侧连接有焊条体,所述收集罩设置于夹持机构下端,且收集罩的外侧连接有弹性管,所述弹性管的尾端设置有风机体,且风机体的下端连接有收集仓,所述主体的右侧固定有显示控制端,所述工作台的内侧设置有气体检测模块。
6.优选的,所述夹持机构与焊条体之间的连接方式为固定连接,且焊接结构与焊条体之间构成伸缩结构。
7.优选的,所述夹持机构与收集罩之间构成密封结构,且收集罩通过弹性管与风机体之间构成弹性结构,并且收集罩与风机体之间构成密封结构。
8.优选的,所述风机体的内侧设置有收集板口,且收集板口为圆弧形结构,并且风机体关于主体的竖直中心线对称。
9.优选的,所述风机体与收集仓之间构成连通结构,且收集仓的下端设置有定位滑槽,并且收集仓通过定位滑槽与主体之间构成滑动结构。
10.优选的,所述气体检测模块关于工作台的竖直中心线对称,且工作台的上端右侧设置有声光报警器,并且声光报警器与显示控制端之间的连接方式为电性连接。
11.与现有技术相比,本实用新型的有益效果是:
12.该便于清理残渣的焊接机器人通过设置的焊接结构与夹持机构相互配合,能够使得主体可以正常进行工作,并且设置的夹持机构能够对焊条体进行夹持;
13.通过设置的收集罩与弹性管能够对焊接过程中产生的废气进行收集,避免工作人员吸入体内而感到不适,并且设置的风机体能够对气体进行引入,通过设置的收集板口能够对焊接过程中的残渣进行收集,从而可以使得装置能够进行分类进行收集,可以增加其收集效果;
14.通过设置的收集仓能够对收集的残渣进行放置,从而可以方便其后续使用,并且设置的定位滑槽能够对收集仓限位,避免使用时收集仓出现偏移,通过设置的气体检测模块能够对焊接时设备周围的空气进行检测,若检测废气超标,设置的声光报警器能够进行报警提醒。
附图说明
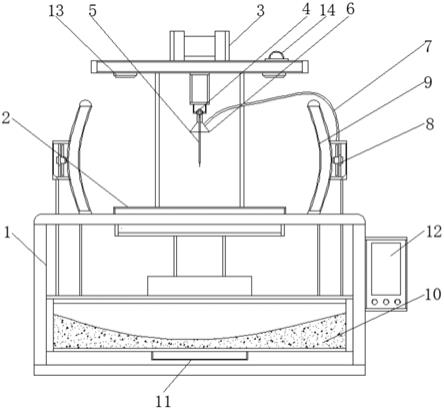
15.图1为本实用新型结构示意图;
16.图2为本实用新型收集罩正视结构示意图;
17.图3为本实用新型收集罩仰视结构示意图。
18.图中:1、主体;2、工作台;3、焊接结构;4、夹持机构;5、焊条体;6、收集罩;7、弹性管;8、风机体;9、收集板口;10、收集仓;11、定位滑槽;12、显示控制端;13、气体检测模块;14、声光报警器。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1
‑
3,本实用新型提供一种技术方案:一种便于清理残渣的焊接机器人,包括主体1、工作台2、焊接结构3、夹持机构4、焊条体5、收集罩6、弹性管7、风机体8、收集板口9、收集仓10、定位滑槽11、显示控制端12、气体检测模块13和声光报警器14,主体1的上表面设置有工作台2,且工作台2的上端固定有焊接结构3,焊接结构3的输出端设置有夹持机构4,且夹持机构4的内侧连接有焊条体5,夹持机构4与焊条体5之间的连接方式为固定连接,且焊接结构3与焊条体5之间构成伸缩结构,通过设置的焊接结构3与夹持机构4相互配合,能够使得主体1可以正常进行工作,并且设置的夹持机构4能够对焊条体5进行夹持;
21.收集罩6设置于夹持机构4下端,且收集罩6的外侧连接有弹性管7,夹持机构4与收集罩6之间构成密封结构,且收集罩6通过弹性管7与风机体8之间构成弹性结构,并且收集罩6与风机体8之间构成密封结构,通过设置的收集罩6与弹性管7能够对焊接过程中产生的废气进行收集,避免工作人员吸入体内而感到不适,并且设置的风机体8能够对气体进行引入,弹性管7的尾端设置有风机体8,且风机体8的下端连接有收集仓10,风机体8的内侧设置有收集板口9,且收集板口9为圆弧形结构,并且风机体8关于主体1的竖直中心线对称,通过设置的收集板口9能够对焊接过程中的残渣进行收集,从而可以使得装置能够进行分类进
行收集,可以增加其收集效果;
22.风机体8与收集仓10之间构成连通结构,且收集仓10的下端设置有定位滑槽11,并且收集仓10通过定位滑槽11与主体1之间构成滑动结构,通过设置的收集仓10能够对收集的残渣进行放置,从而可以方便其后续使用,并且设置的定位滑槽11能够对收集仓10限位,避免使用时收集仓10出现偏移,主体1的右侧固定有显示控制端12,工作台2的内侧设置有气体检测模块13,气体检测模块13关于工作台2的竖直中心线对称,且工作台2的上端右侧设置有声光报警器14,并且声光报警器14与显示控制端12之间的连接方式为电性连接,通过设置的气体检测模块13能够对焊接时设备周围的空气进行检测,若检测废气超标,设置的声光报警器14能够进行报警提醒。
23.工作原理:对于这类的焊接机器人,使用前,使用者首先将主体1放置在知道位置,并通过夹持机构4对焊条体5进行夹持,当夹持机构4关闭时,设置的收集罩6能够闭合,从而可以方便后续对废气进行收集,然后再将收集仓10插入主体1内部,通过主体1内侧设置的定位滑槽11可以对收集仓10限位,避免使用时收集仓10出现偏移,使用时,使用者首先将主体1连接电源,再将需要焊接的工具固定在工作台2上侧,随后便可以通过焊接结构3与焊条体5对工具进行焊接,与此同时,将设置的风机体8开启,其可以通过收集罩6与弹性管7能够对焊接过程中产生的废气进行收集,避免工作人员吸入体内而感到不适,并且在风机体8内侧设置的收集板口9能够对焊接过程中的残渣进行收集,从而可以使得装置能够进行分类进行收集,最后收集的残渣会进入收集仓10内,然后设置的气体检测模块13能够对能够对焊接时设备周围的空气进行检测,并通过显示控制端12对其进行显示,若废气出现超标时,设置的声光报警器14能够进行报警提醒,就这样完成整个焊接机器人的使用过程。
24.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。