技术特征:
1.一种对象夹持组件,其包括:主体,所述主体具有上表面和与所述上表面相对的下表面;真空操作的夹持部件,所述真空操作的夹持部件耦接到所述下表面,所述真空操作的夹持部件被配置为接合第一类别的第一目标对象;以及可变宽度夹持部件,所述可变宽度夹持部件耦接到所述主体,所述可变宽度夹持部件包括:第一臂,所述第一臂耦接到所述主体并且在所述主体的第一纵向侧处具有第一端部区域;第一机械夹持部件,所述第一机械夹持部件耦接到所述第一臂的所述第一端部区域,所述第一机械夹持部件包括被配置为接合第二类别的第二目标对象的第一侧的一个或多个第一夹具,其中所述第二目标对象在类别上与所述第一目标对象不同;第一旋转部件,所述第一旋转部件将所述第一机械夹持部件耦接到所述第一臂,所述第一旋转部件能够在升高位置与降低位置之间移动;第二臂,所述第二臂耦接到所述主体并且在所述主体的与所述第一纵向侧相对的第二纵向侧处具有第二端部区域;第二机械夹持部件,所述第二机械夹持部件耦接到所述第二臂的所述第二端部区域,所述第二机械夹持部件包括被配置为接合所述第二目标对象的第二侧的一个或多个第二夹具;以及第二旋转部件,所述第二旋转部件将所述第二机械夹持部件耦接到所述第二臂,所述第二旋转部件能够在所述升高位置与所述降低位置之间移动,其中所述第一臂和所述第二臂能够沿线性方向延伸,以控制所述第一端部区域与所述第二端部区域之间的距离。2.如权利要求1所述的对象夹持组件,其中所述第二类别的所述第二目标对象包括托盘,并且其中所述可变宽度夹持部件还包括:一个或多个第一抽吸部件,所述一个或多个第一抽吸部件耦接到所述第一机械夹持部件,其中所述一个或多个第一抽吸部件被配置为接合与所述第一类别和所述第二类别不同的第三类别的第三目标对象的上表面,所述第三类别包括滑托板;以及一个或多个第二抽吸部件,所述一个或多个第二抽吸部件耦接到所述第二机械夹持部件,其中所述一个或多个第二抽吸部件被配置为接合所述第二目标对象的所述上表面,其中所述第一类别的所述第一目标对象包括以放置在所述托盘和/或所述滑托板上为目标的一个或多个包裹。3.如权利要求1所述的对象夹持组件,其中:所述第一机械夹持部件还包括耦接在所述一个或多个第一夹具与所述第一旋转部件之间的第一支撑板;并且所述第二机械夹持部件还包括耦接在所述一个或多个第二夹具与所述第二旋转部件之间的第二支撑板。4.如权利要求3所述的对象夹持组件,其中当所述第一旋转部件和所述第二旋转部件处于所述降低位置时,所述一个或多个第一夹具和所述一个或多个第二夹具被设位成在所述第一侧和所述第二侧上接合所述第二目标对象的下表面,并且其中:
所述第一机械夹持部件还包括耦接到所述第一支撑板并且被设位成在所述第一侧上向所述第二目标对象的上表面施加压紧力的一个或多个第一压力圆筒;并且所述第二机械夹持部件还包括耦接到所述第二支撑板并且被设位成在所述第二侧上向所述第二目标对象的所述上表面施加所述压紧力的一个或多个第二压力圆筒。5.如权利要求1所述的对象夹持组件,其还包括成像传感器,所述成像传感器耦接到所述主体并且被设位成收集位于所述对象夹持组件的近侧内的对象的图像数据,其中所述成像传感器可操作地耦接到控制器以将所述图像数据发送到所述控制器,以确定所述对象的类别以及是否用所述真空操作的夹持部件或所述可变宽度夹持部件来夹持所述对象。6.如权利要求1所述的对象夹持组件,其中所述真空操作的夹持部件包括被配置为接合与所述第一目标对象不同的第二目标对象的抽吸夹持器。7.如权利要求1所述的对象夹持组件,其还包括外部连接器,所述外部连接器耦接到所述主体的所述上表面并且能够可操作地耦接到机器人臂,其中所述可变宽度夹持部件被设位成沿第一轴线伸展,并且其中所述外部连接器被设位成控制所述主体围绕与所述第一轴线正交的第二轴线的旋转。8.如权利要求1所述的对象夹持组件,其中所述第一旋转部件和所述第二旋转部件在所述升高位置与所述降低位置之间移动180度。9.一种操作具有对象夹持组件的机器人系统的方法,所述方法包括:生成用于利用机器人臂将所述对象夹持组件设位成与目标对象相邻的命令;生成将所述对象夹持组件动态地配置成夹持状态的命令,所述夹持状态包括完全折叠状态、多个延伸状态和夹紧状态中的至少一者,一旦所述对象夹持组件处于所述夹持状态,就生成接合所述目标对象的命令;生成用于利用所述机器人臂将所述目标对象从第一位置移动到与所述第一位置间隔开的第二位置的命令;以及生成在所述第二位置处脱离所述目标对象的命令。10.如权利要求9所述的方法,其中:所述对象夹持组件包括:主体;真空操作的夹持部件,所述真空操作的夹持部件耦接到所述主体的下表面;以及可变宽度夹持部件,所述可变宽度夹持部件耦接到所述主体并且包括两个或更多个机械夹持元件;在所述完全折叠状态下,所述可变宽度夹持部件完全缩回,并且所述真空操作的夹持部件被设位成限定所述对象夹持组件的最低表面以接合所述目标对象;所述多个延伸状态中的每一个改变所述可变宽度夹持部件的所述两个或更多个机械夹持元件之间的距离;并且在所述夹紧状态下,所述两个或更多个机械夹持元件被设位成接合所述目标对象。11.如权利要求9所述的方法,其还包括:接收所述目标对象的图像数据;以及根据所述图像数据确定所述目标对象的一个或多个特性,所述一个或多个特性包括以下中的至少一者:所述目标对象的类别、所述目标对象的取向、以及所述目标对象上的候选
夹持位置,其中用于将所述对象夹持组件动态地配置成所述夹持状态的所述命令至少部分地基于根据所述图像数据确定的所述目标对象的所述一个或多个特性。12.如权利要求11所述的方法,其还包括:标识所述图像数据相对于竖直轴线的角度;以及基于所标识的角度使用一个或多个失真来调整所述图像数据。13.如权利要求11所述的方法,其还包括:标识所述图像数据相对于所述目标对象的面的角度;以及基于所标识的角度使用一个或多个失真来调整所述图像数据。14.如权利要求11所述的方法,其还包括:标识所述图像数据相对于所述目标对象的面的第一角度;以及生成指令以便以相对于所述目标对象的所述面正交的第二角度生成所述目标对象的新图像数据。15.如权利要求9所述的方法,其中所述目标对象是第一目标对象并且所述夹持状态是第一夹持状态,并且其中所述方法还包括:生成用于利用所述机器人臂将所述对象夹持组件设位成与第二目标对象相邻的命令;生成将所述对象夹持组件动态地配置成第二夹持状态的命令,所述第二夹持状态包括所述完全折叠状态、所述多个延伸状态和所述夹紧状态中的至少一者;一旦所述对象夹持组件处于所述第二夹持状态,就生成接合所述第二目标对象的命令;生成用于利用所述机器人臂将所述第二目标对象从第三位置移动到与所述第三位置间隔开的第四位置的命令;以及生成在所述第四位置处脱离所述第二目标对象的命令。16.如权利要求9所述的方法,其中所述目标对象是多个不同的目标对象中的一者,其中所述多个不同的目标对象包括一个或多个包裹、一个或多个托盘、和一个或多个滑托板,并且其中所述方法还包括:标识用于操纵所述多个不同目标对象的操作,所述操作包括与操纵所述多个不同目标对象相对应的任务序列,其中操作是包装操作或拆包操作;以及基于所标识的操作和任务序列,迭代地选择所述多个不同目标对象中的每个对象作为所述目标对象,并且生成用于设位、动态地配置、接合、移动和脱离所选择的目标对象的对应命令。17.一种机器人系统,其包括:机器人臂;以及对象夹持组件,所述对象夹持组件耦接到所述机器人臂,所述对象夹持组件包括:主体,所述主体具有上表面和与所述上表面相对的下表面;外部连接器,所述外部连接器耦接在所述主体的所述上表面与所述机器人臂之间;真空操作的夹持部件,所述真空操作的夹持部件耦接到所述主体的所述下表面;以及可变宽度夹持部件,所述可变宽度夹持部件耦接到所述主体,所述可变宽度夹持部件能够在完全折叠状态、多个延伸状态与夹紧状态之间移动。
18.如权利要求17所述的机器人系统,其中所述可变宽度夹持部件包括:线性延伸机构,所述线性延伸机构耦接到所述主体,所述线性延伸机构具有第一远侧区域和与所述第一远侧区域相对的第二远侧区域;两个旋转机构,所述两个旋转机构各自耦接到所述线性延伸机构的所述第一远侧区域和所述第二远侧区域;以及一个或多个机械夹持器,所述一个或多个机械夹持器耦接到所述旋转机构中的每一者。19.如权利要求18所述的机器人系统,其中在所述完全折叠状态下:所述线性延伸机构缩回以将所述线性延伸机构的所述第一远侧区域和所述第二远侧区域以最小距离分开设位;并且所述旋转机构处于升高位置,其中所述旋转机构的所述升高位置离开所述主体的所述下表面引导耦接到所述旋转机构中的每一者的所述一个或多个机械夹持器。20.如权利要求17所述的机器人系统,其中:所述对象夹持组件还包括成像传感器,所述成像传感器耦接到所述主体并且被设位成收集对象的图像数据,所述对象夹持组件通过所述真空操作的夹持部件和/或所述可变宽度夹持部件来夹持所述对象;并且所述机器人系统还包括控制器,所述控制器可操作地耦接到所述成像传感器、所述真空操作的夹持部件和所述可变宽度夹持部件以:从所述成像传感器接收所述图像数据;确定使用所述完全折叠状态和所述多个延伸状态中的哪一者来夹持所述对象,所述确定基于以下中的至少一者:所述对象的类别、所述对象的取向和所述对象上的候选夹持位置;将所述可变宽度夹持部件移动到所确定的状态;并且控制所述真空操作的夹持部件和/或所述可变宽度夹持部件以夹持所述对象。
技术总结
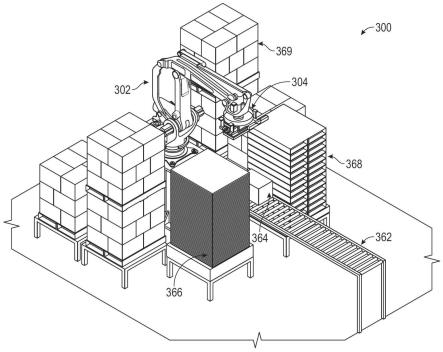
本文公开了具有可变夹持机构的机器人系统以及相关的系统和方法。在一些实施方案中,所述机器人系统包括机器人臂和耦接到所述机器人臂的对象夹持组件。所述对象夹持组件可包括:主体,所述主体通过所述主体的上表面上的外部连接器耦接到所述机器人臂;以及真空操作的夹持部件,所述真空操作的夹持部件耦接到所述主体的下表面。所述对象夹持组件还可包括耦接到所述主体的可变宽度夹持部件。所述可变宽度夹持部件能够在完全折叠状态、多个延伸状态与夹紧状态之间移动,以夹持具有不同形状、大小、重量和取向的多种目标对象。重量和取向的多种目标对象。重量和取向的多种目标对象。
技术研发人员:雷磊 张艺轩 叶旭涛 徐熠 布兰登
受保护的技术使用者:牧今科技
技术研发日:2022.08.15
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。