1.本实用新型涉及交通巡检技术领域,具体是一种公路隧道巡检机器人。
背景技术:
2.近年来我国交通工程建设发展迅速,交通流量不断增长,路况改善以及运输物品越来越复杂,使交通隧道的火灾和隧道污染等风险大大提高,引发了不少严重的灾难性事故,尤其是火灾事故。它不仅严重威胁到人的生命和财产安全,而且对交通设施、人类的生产活动造成巨大的损坏。传统的巡检方法是人工检测法,不仅效率低,而且在发生火灾时,对人员的安全造成危险。发生有毒气体泄漏等异常情况时,需要相关人员进入隧道确认收集相关数据资料,由于人员的心理恐惧会导致相关信息及资料不准确不及时,暴露在有毒有害气体中可能导致人员中毒造成伤害。现有的巡检机器人多数采用工字钢轨道,行走机构抱紧工字钢暴漏在外部,轨道面和行走轮很容易积满灰尘,造成运行不畅,进而影响巡检效果。并且巡检机器人在公路隧道中的应用还很少,因此隧道的智能化监控显得越来越重要。
技术实现要素:
3.本实用新型要解决的技术问题是:为克服上述问题,提供一种公路隧道巡检机器人。
4.本实用新型解决其技术问题所采用的技术方案是:一种公路隧道巡检机器人,包括轨道、机体、供电装置;所述轨道布置于公路隧道的顶部,其截面呈c型,并且其开口部位朝下。
5.所述机体包括在所述轨道内部运行的主动行走机构、从动行走机构,所述主动行走机构、从动行走机构之间通过横梁连接;所述横梁的下方设有竖直布置的立管,所述立管向下延伸从所述轨道开口部位伸出,所述立管的下端设有机架。
6.所述机架包括水平布置的框架,所述框架的下方从左向右依次设有左固定盒、驱动装置、控制箱、右固定盒;所述左固定盒内设有位置识别装置;所述驱动装置位于所述主动行走机构的下方并通过传动机构连接;所述控制箱内设有处理系统;所述右固定盒内设有环境检测装置。
7.所述机架的外部包覆有上壳体、下壳体,所述上壳体内部的左右两端均设有一个激光测距传感器和一个急停开关;所述下壳体的右端设有隧道外形检测装置;所述下壳体的下方设有图像采集装置。
8.所述供电装置包括集线器、滑触线,所述滑触线位于所述轨道的一个外侧壁上,所述集线器位于所述机体的上部,并与所述滑触线相滑触。
9.优选的,所述轨道的两个侧壁的内表面的上部都设有水平布置的导向槽;所述轨道开口部位两侧的底板上表面上各设有一限位台。
10.所述横梁的两端均设有一组水平布置的铰接耳板,每组所述铰接耳板上均通过竖
直销轴连接有一个十字铰接座。
11.所述主动行走机构包括主动轮架,所述主动轮架为竖直布置的矩型管,并且向下延伸从所述轨道的开口部位伸出;所述主动轮架的上部设有贯通的第一轮轴,所述第一轮轴的两端各设有一个主动轮;所述第一轮轴位于所述主动轮架空腔中的轴段上设有一个驱动轮;所述主动轮架的右侧设有u型板,所述u型板通过水平销轴与所述十字铰接座连接;所述主动轮架的左侧和u型板的上边缘均设有翼板,所述翼板上设有对称布置的水平导向轮,所述导向轮与所述导向槽相配合;所述主动轮架伸出所述轨道开口的部位设有一个夹紧轴,所述夹紧轴与所述第一轮轴平行布置,所述夹紧轴的两端设有夹紧轮;所述夹紧轮与所述轨道的底面相接触。
12.所述驱动装置包括镂空的箱型固定座,所述固定座的左上部与所述主动轮架的最下端连接;所述固定座的下部设有驱动电机,所述驱动电机的输出轴上设有皮带轮,所述皮带轮通过传动机构与所述驱动轮连接。
13.所述从动行走机构包括从动轮架,所述从动轮架的矩型管与所述主动轮架相同规格,并且向下延伸从所述轨道的开口部位伸出;所述从动轮架上设有贯通的第二轮轴,所述第二轮轴的两端各设有一个行走轮;所述从动轮架的左侧设有所述u型板,所述u型板通过水平销轴与所述十字铰接座连接;所述从动轮架的右侧和u型板的上边缘均设有翼板,所述翼板上设有对称布置的水平导向轮;所述从动轮架伸出所述轨道开口的部位设有所述夹紧轮。
14.所述位置识别装置包括光电编码器,用于实时反馈机器人的位置。在巡检机器人的位置控制上,通过光电编码器进行实时位置反馈,同时利用轨道上预设的rfid标签进行位置校正,以避免机器人运行时出现打滑、编码器累积误差造成位置偏差问题。
15.所述环境检测装置包括气体传感器,用于检测空气中一氧化碳、二氧化碳、甲烷、tvoc、pm2.5浓度,空气湿度,烟雾和噪音。通过在机架内部通风处安装气体传感器,对进入其内部的空气作出识别,检测隧道内有毒有害气体浓度。
16.所述隧道外形检测装置包括激光雷达,用于对隧道横截面实时建图。在机器人运动过程中激光雷达对隧道横截面实时建图,传递到控制箱内处理系统,对不同时段内的相同位置截面图进行对比,可以分析出隧道的形变,对于隧道可能发生的危险情况作出预警。
17.所述图像采集装置包括云台摄像头,用于采集图像。云台摄像头在机器人运动当中可以实时采集图像,并通过控制可以360度旋转,对隧道内无死角监控,通过控制箱内的图像分析系统,识别图像中有效物体,并将图像传递给后台工作人员,便于工作人员应对突发事件,可以第一时间掌控现场。
18.所述下壳体的底部还设有对讲系统、信号灯,所述对讲系统用于对隧道内现场人员进行沟通指导,所述信号灯用于实时反映机器人的工作状态。
19.本实用新型的有益效果是:
20.1、本实用新型采用轨道内部行走机构并结合半封闭式轨道,有效的解决了行走不顺畅的问题,并减少了灰尘对行走机构的污染;
21.2、本实用新型在移动过程中,通过气体检测装置检测隧道内有毒有害气体浓度,通过图像采集装置采集隧道内图像,通过控制箱内图像模块对图像进行识别,来判断隧道内的安全情况;
22.3、本实用新型通过隧道外形检测装置来检测隧道横截面方向是否发生形变,来避免隧道塌陷等危险,实现了公路隧道的自动化检测,极大的提高了工作效率。
附图说明
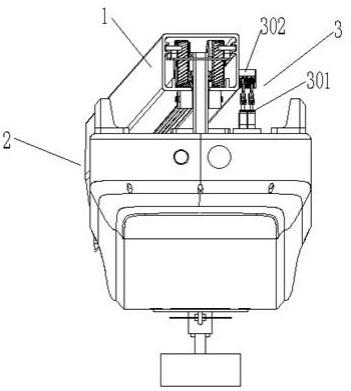
23.图1、本实用新型的结构示意图;
24.图2、本实用新型的机体的结构示意图;
25.图3、本实用新型的机架的结构示意图;
26.图4、本实用新型的内部结构示意图;
27.图5、本实用新型的轨道截面的结构示意图;
28.图6、本实用新型的主动行走机构及横梁的结构示意图;
29.图7、本实用新型的从动行走机构;
30.图8、本实用新型的底部结构示意图。
31.1、轨道;101、导向槽;102、限位台;2、机体;201、上壳体;202、下壳体;3、供电装置;301、集线器;302、滑触线;4、主动行走机构;401、主动轮架;402、第一轮轴;403、主动轮;404、驱动轮;405、u型板;406、翼板;407、导向轮;408、夹紧轴;409、夹紧轮;5、从动行走机构;501、从动轮架;502、第二轮轴;503、行走轮;6、横梁;601、铰接耳板;602、竖直销轴;603、十字铰接座;604、水平销轴;7、立管;8、机架;801、框架;802、左固定盒; 803、控制箱;804、右固定盒;9、驱动装置;901、固定座;902、驱动电机;903、皮带轮;904、传动机构;10、位置识别装置;11、处理系统;12、环境检测装置;13、激光测距传感器;14、急停开关;15、隧道外形检测装置;16、图像采集装置;17、对讲系统;18、信号灯。
具体实施方式
32.现在结合附图对本实用新型作进一步详细的说明,这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
33.如图1-8所示,具体的实施例中,一种公路隧道巡检机器人,包括轨道1、机体2、供电装置3;所述轨道1布置于公路隧道的顶部,其截面呈c型,并且其开口部位朝下。
34.所述机体2包括在所述轨道1内部运行的主动行走机构4、从动行走机构5,所述主动行走机构4、从动行走机构5之间通过横梁6连接;所述横梁6的下方设有竖直布置的立管7,所述立管7向下延伸从所述轨道1开口部位伸出,所述立管7的下端设有机架8。
35.所述机架8包括水平布置的框架801,所述框架801的下方从左向右依次设有左固定盒802、驱动装置9、控制箱803、右固定盒804;所述左固定盒802内设有位置识别装置10;所述驱动装置9位于所述主动行走机构4的下方并通过传动机构904连接;所述控制箱803内设有处理系统11;所述右固定盒804内设有环境检测装置12。
36.所述机架8的外部包覆有上壳体201、下壳体202,所述上壳体201内部的左右两端均设有一个激光测距传感器13和一个急停开关14;所述下壳体202的右端设有隧道外形检测装置15;所述下壳体202的下方设有图像采集装置16。巡检机器人两侧装有激光测距传感器13,设备内部有预先设置好的警戒距离。当有障碍物出现时,该传感器会测量障碍物到设备间距离并反馈给内部的控制系统,控制系统会根据当前速度计算减速距离,并在到达该距离时控制驱动电机902进行减速,最终使设备在与障碍物之间距离等于警戒距离时停止
运行。
37.所述供电装置3包括集线器301、滑触线302,所述滑触线302位于所述轨道1的一个外侧壁上,所述集线器301位于所述机体2的上部,并与所述滑触线302相滑触。机器人运行过程中,集线器301始终在滑触线302内滑动,为机器人提供电能。
38.所述轨道1的两个侧壁的内表面的上部都设有水平布置的导向槽101;所述轨道1开口部位两侧的底板上表面上各设有一限位台102。
39.所述横梁6的两端均设有一组水平布置的铰接耳板601,每组所述铰接耳板601上均通过竖直销轴602连接有一个十字铰接座603。
40.所述主动行走机构4包括主动轮403架401,所述主动轮403架401为竖直布置的矩型管,并且向下延伸从所述轨道1的开口部位伸出;所述主动轮403架401的上部设有贯通的第一轮轴402,所述第一轮轴402的两端各设有一个主动轮403;所述第一轮轴402位于所述主动轮403架401空腔中的轴段上设有一个驱动轮404;所述主动轮403架401的右侧设有u型板405,所述u型板405通过水平销轴604与所述十字铰接座603连接;所述主动轮403架401的左侧和u型板405的上边缘均设有翼板406,所述翼板406上设有对称布置的水平导向轮407,所述导向轮407与所述导向槽101相配合;所述主动轮403架401伸出所述轨道1开口的部位设有一个夹紧轴408,所述夹紧轴408与所述第一轮轴402平行布置,所述夹紧轴408的两端设有夹紧轮409;所述夹紧轮409与所述轨道1的底面相接触。
41.所述驱动装置9包括镂空的箱型固定座901,所述固定座901的左上部与所述主动轮403架401的最下端连接;所述固定座901的下部设有驱动电机902,所述驱动电机902的输出轴上设有皮带轮903,所述皮带轮903通过传动机构904与所述驱动轮404连接。巡检机器人的驱动电机902采用直流无刷电机,通过磁性霍尔传感器反馈电机转动信息,使用六步换向法进行控制。控制算法采用电流环和速度环结合的分段式pid算法,在启动及停止阶段分段控制电机的电流,使其在满足出力需求的同时保证巡检机器人运行平滑。
42.所述从动行走机构5包括从动轮架501,所述从动轮架501的矩型管与所述主动轮403架401相同规格,并且向下延伸从所述轨道1的开口部位伸出;所述从动轮架501上设有贯通的第二轮轴502,所述第二轮轴502的两端各设有一个行走轮503;所述从动轮架501的左侧设有所述u型板405,所述u型板405通过水平销轴604与所述十字铰接座603连接;所述从动轮架501的右侧和u型板405的上边缘均设有翼板406,所述翼板406上设有对称布置的水平导向轮407;所述从动轮架501伸出所述轨道1开口的部位设有所述夹紧轮409。
43.主动行走机构4、从动行走机构5均与横梁6通过十字铰接座603铰接,可以旋转和俯仰,便于机器人完成上下坡和转弯动作。
44.所述位置识别装置10包括光电编码器,用于实时反馈机器人的位置。在巡检机器人的位置控制上,通过光电编码器进行实时位置反馈,同时利用轨道1上预设的rfid标签进行位置校正,以避免机器人运行时出现打滑、编码器累积误差造成位置偏差问题。控制算法采用位置环分段式pid算法,在停止时采用断点控制,根据当前不同速度设置不同的减速断点,保证巡检机器人运行平滑且停止位置准确。
45.所述环境检测装置12包括气体传感器,用于检测空气中一氧化碳、二氧化碳、甲烷、tvoc、pm2.5浓度,空气湿度,烟雾和噪音。通过在机架8内部通风处安装气体传感器,对进入其内部的空气作出识别,检测隧道内有毒有害气体浓度。
46.所述隧道外形检测装置15包括激光雷达,用于对隧道横截面实时建图。在机器人运动过程中激光雷达对隧道横截面实时建图,传递到控制箱803内处理系统11,对不同时段内的相同位置截面图进行对比,可以分析出隧道的形变,对于隧道可能发生的危险情况作出预警。
47.所述图像采集装置16包括云台摄像头,用于采集图像。云台摄像头在机器人运动当中可以实时采集图像,并通过控制可以360度旋转,对隧道内无死角监控,通过控制箱803内的处理系统11中的图像分析系统,识别图像中有效物体,并将图像传递给后台工作人员,便于工作人员应对突发事件,可以第一时间掌控现场。
48.所述下壳体202的底部还设有对讲系统17、信号灯18,所述对讲系统17用于对隧道内现场人员进行沟通指导,所述信号灯18用于实时反映机器人的工作状态。
49.本实用新型在使用时:
50.机器人正常工作时,滑触线302需要通电,通过集线器301给驱动电机902及整个机器人供电,驱动电机902带动主动轮403转动,为整机提供动力,夹紧轮409与主动轮403互相作用,在机架8重力作用下使主动轮403和夹紧轮409始终抱紧轨道1。主动轮403带动行走轮503、机架8在轨道1上运行,在导向轮407的限位下机器人始终沿轨道1延伸方向运行。在机器人运动过程中激光雷达对隧道横截面实时建图,传递到控制箱803内处理系统11,对不同时段内的相同位置截面图进行对比,可以分析出隧道的形变,对于隧道可能发生的危险情况作出预警。在机器人运动过程中气体传感器通过对进入其内部的空气作出识别,可以检测出隧道内空气中一氧化碳、二氧化碳、甲烷、tvoc、pm2.5浓度,空气湿度,烟雾和噪音。云台摄像头在机器人运动当中可以实时采集图像,并通过控制可以360度旋转,对隧道内无死角监控,通过控制箱803内的图像分析系统,识别图像中有效物体,并将图像传递给后台工作人员,便于工作人员应对突发事件,可以第一时间掌控现场。通过对讲系统17对隧道内现场人员进行沟通指导。安装在下壳体202底部的信号灯18,可以实时反映机器人的工作状态。
51.本实用新型采用轨道内部行走机构并结合半封闭式轨道,有效的解决了行走不顺畅的问题,并减少了灰尘对行走机构的污染;在移动过程中,通过气体检测装置检测隧道内有毒有害气体浓度,通过图像采集装置采集隧道内图像,通过控制箱内图像模块对图像进行识别,来判断隧道内的安全情况;通过隧道外形检测装置来检测隧道横截面方向是否发生形变,来避免隧道塌陷等危险。
52.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改,本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
