技术特征:
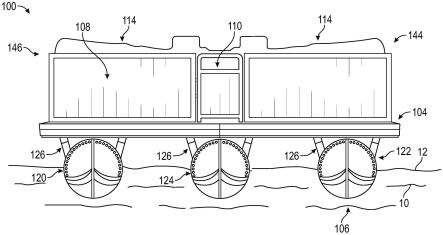
1.一种浮筒船,包括:多个浮筒;甲板,由所述多个浮筒支撑,所述甲板具有外周边;推进系统,具有推进所述浮筒船通过水的至少一个原动机;推力器系统,包括第一推力器和第二推力器,其中,所述第一推力器或所述第二推力器中的至少一个推力器具有停用位置和使用位置;以及控制器,通信地联接至所述第一推力器和所述第二推力器,所述控制器配置为:识别第一条件;基于所述第一条件,将所述至少一个推力器配置为处于所述使用位置;识别第二条件;以及基于所述第二条件,将所述至少一个推力器配置为处于所述停用位置。2.根据权利要求1所述的浮筒船,还包括可移除地联接至所述甲板的操作者控制台的可移除推力器输入控件,其中,所述可移除推力器输入控件通信地联接至所述控制器。3.根据权利要求2所述的浮筒船,其中,所述第一条件是基于经由所述可移除推力器输入控件接收到的用户指示识别的,以启用所述推力器系统。4.根据权利要求2所述的浮筒船,其中,所述第二条件是基于经由所述可移除推力器输入控件接收到的用户指示识别的,以停用所述推力器系统。5.根据权利要求1所述的浮筒船,其中,识别所述第一条件包括确定所述浮筒船的速度低于预定阈值。6.根据权利要求1所述的浮筒船,其中,识别所述第一条件包括:确定所述推力器系统的动力源低于预定阈值;以及基于确定所述动力源低于所述预定阈值,将所述推力器系统配置为在所述至少一个原动机推进所述浮筒船通过所述水时使用由所述推力器系统产生的电流来为所述动力源充电。7.根据权利要求1所述的浮筒船,还包括由所述多个浮筒支撑的多个传感器,并且其中,所述第二条件是基于来自所述多个传感器中的至少一个传感器的传感器数据识别的。8.根据权利要求7所述的浮筒船,其中:所述多个传感器包括全球定位系统或惯性测量单元中的至少一者;并且所述控制器还配置为:使用所述多个传感器来确定实际运动;确定所述实际运动不同于目标运动;以及基于确定所述实际运动不同于所述目标运动来:基于所述实际运动调整目标运动以生成经调整的目标运动;以及基于所述经调整的目标运动向所述第一推力器和所述第二推力器中的至少一者提供命令。9.根据权利要求8所述的浮筒船,其中,所述控制器还配置为:基于从可移除推力器输入控件接收到的用户输入来确定所述目标运动。10.根据权利要求8所述的浮筒船,其中:所述实际运动是平移运动或旋转运动中的至少一者;并且
所述目标运动是平移运动或旋转运动中的至少一者。11.根据权利要求1所述的浮筒船,其中,所述控制器经由网络连接通信地联接至所述推进系统的推进控制器。12.根据权利要求11所述的浮筒船,其中,识别所述第二条件包括:经由与所述推进控制器的所述网络连接获得推进系统信息;以及确定所述推进系统信息超过预定阈值。13.根据权利要求11所述的浮筒船,其中,识别所述第二条件包括确定所述推进系统的动力源低于预定阈值。14.根据权利要求1所述的浮筒船,其中,所述第一推力器是固定推力器,并且所述第二推力器是可操纵推力器。15.根据权利要求14所述的浮筒船,其中:所述第一推力器定位在所述浮筒船的前部;并且所述第二推力器定位在所述浮筒船的后部。16.根据权利要求15所述的浮筒船,其中,所述第一推力器和所述第二推力器沿所述浮筒船的纵向中心线定位。17.根据权利要求1所述的浮筒船,其中,所述控制器使用所述浮筒船的网络总线通信地联接至所述第一推力器和所述第二推力器。18.一种用于浮筒船的推力器系统,包括:第一推力器;第二推力器;多个传感器;以及控制器,配置为:经由所述浮筒船的网络总线获得与所述浮筒船的推进系统相关联的推进系统信息;基于所述推进系统信息识别条件;以及基于所识别的条件,将所述第一推力器和所述第二推力器中的至少一个推力器配置为处于使用位置或停用位置。19.根据权利要求18所述的推力器系统,其中,识别所述条件包括:确定所述推进系统信息指示所述浮筒船的速度低于预定阈值;以及将所述至少一个推力器配置为处于所述使用位置。20.根据权利要求18所述的推力器系统,其中,识别所述条件包括:确定所述推进系统信息超过预定阈值;以及将所述至少一个推力器配置为处于所述停用位置。21.根据权利要求18所述的推力器系统,还包括可移除推力器输入控件,所述可移除推力器输入控件配置为可移除地联接至所述浮筒船,其中,所述可移除推力器输入控件通信地联接至所述控制器。22.根据权利要求21所述的推力器系统,其中,所述控制器还配置为:从所述可移除推力器输入控件接收用户输入;使用所述多个传感器来确定实际运动;确定所述实际运动不同于与接收到的所述用户输入相关联的目标运动;以及
基于确定所述实际运动不同于所述目标运动来:基于所述实际运动调整目标运动以生成经调整的目标运动;以及基于所述经调整的目标运动向所述第一推力器和所述第二推力器中的至少一者提供命令。23.根据权利要求22所述的推力器系统,其中:所述实际运动是平移运动或旋转运动中的至少一者;并且所述目标运动是平移运动或旋转运动中的至少一者。24.根据权利要求18所述的推力器系统,其中,所述第一推力器是固定推力器,并且所述第二推力器是可操纵推力器。25.根据权利要求18所述的推力器系统,其中,所述控制器配置为使用所述浮筒船的网络总线来通信地联接至所述第一推力器和所述第二推力器。26.一种用于生成与推力器系统相关联的用户界面的方法,所述方法包括:呈现与浮筒船相关联的轮廓;接收指示所述浮筒船的目标移动的用户输入;基于接收到的所述用户输入,生成与所述轮廓相关联的移动意图线,其中,所述移动意图线指示目标移动方向、目标移动幅度或目标移动旋转中的至少一者;以及更新所述用户界面以包括所生成的所述移动意图线。27.根据权利要求26所述的方法,还包括:从所述浮筒船的多个传感器获得传感器数据;使用所述传感器数据来识别障碍物;生成与所述障碍物相关联的障碍物指示;以及更新所述用户界面以包括所生成的所述障碍物指示。28.根据权利要求27所述的方法,其中:所述障碍物是基于来自多个传感器的传感器数据识别的;并且所生成的所述障碍物指示与多个传感器位置相关联地显示,所述多个传感器位置与多个传感器相关联。29.根据权利要求26所述的方法,其中,所述用户输入是经由触敏显示器接收的,所述触敏显示器上呈现所述用户界面。30.根据权利要求26所述的方法,其中,所述用户输入是从可移除推力器输入控件接收到的。31.根据权利要求30所述的方法,其中,所述用户界面还包括指示接收到的所述用户输入的操纵杆元件。32.根据权利要求26所述的方法,其中,所述用户界面还包括多个推力器元件,每个推力器元件与所述推力器系统的推力器相关联。
技术总结
本申请涉及一种用于浮筒船或其他船只的推力器系统控制技术,具体例如船用推力器控件。除了舷外原动机之外,推力器系统还可以包括用于控制浮筒船的移动的多个推力器。推力器可以是固定推力器和/或可操纵推力器。在示例中,可以基于识别推力器可能受损的条件来收回推力器。可以基于识别推力器可以用于为相关联动力源再充电的条件来部署推力器。用于控制推力器的用户输入可以调整以考虑作用在浮筒船上的外力。提供了用于控制推力器系统的用户界面,操作者经由用户界面操纵移动意图线以控制推力器系统。用户界面还可以包括障碍物指示器,从而使操作者能够相应地操纵浮筒船。从而使操作者能够相应地操纵浮筒船。从而使操作者能够相应地操纵浮筒船。
技术研发人员:J
受保护的技术使用者:北极星工业有限公司
技术研发日:2022.08.09
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。