船用推力器控件
1.相关申请的交叉引用
2.本公开要求于2021年8月10日提交的标题为“船用推力器控件”的美国临时专利申请no.63/231,452的优先权,所述美国临时专利申请的全部公开内容通过引用明确并入本文。
背景技术:
3.浮筒和其他类型的多体船可具有用于推进和操纵船只的一个或多个舷外电机。然而,使用舷外电机来操控此类船只可能是困难的,尤其是在狭窄或具有挑战性的环境中,诸如在停靠或绕过障碍物时。
4.正是关于这些和其他一般考量,描述了实施例。此外,尽管已讨论了相对具体的问题,但应当理解,实施例不应限于解决背景技术中确定的具体问题。
技术实现要素:
5.如上所述,本文提供的实施例涉及休闲载具。示例性实施例包括但不限于以下示例。
6.在一个方面,提供了一种浮筒船。所述浮筒船包括:多个浮筒;甲板,由多个浮筒支撑,甲板具有外周边;推进系统,具有推进浮筒船通过水的至少一个原动机;推力器系统,包括第一推力器和第二推力器,其中,第一推力器或第二推力器中的至少一个推力器具有停用位置和使用位置;以及控制器,通信地联接至第一推力器和第二推力器,控制器配置为:识别第一条件;基于第一条件,将至少一个推力器配置为处于使用位置;识别第二条件;以及基于第二条件,将至少一个推力器配置为处于停用位置。
7.在另一方面,提供了一种用于浮筒船的推力器系统。推力器系统包括:第一推力器;第二推力器;多个传感器;以及控制器,控制器配置为:经由浮筒船的网络总线获得与浮筒船的推进系统相关联的推进系统信息;基于推进系统信息来识别条件;以及基于所识别的条件,将第一推力器和第二推力器中的至少一个推力器配置为处于使用位置或停用位置。
8.在另一方面,提供了一种用于生成与推力器系统相关联的用户界面的方法。所述方法包括:呈现与浮筒船相关联的轮廓;接收指示浮筒船的目标移动的用户输入;基于所接收到的用户输入,生成与轮廓相关联的移动意图线,其中,移动意图线指示目标移动方向、目标移动幅度或目标移动旋转中的至少一者;以及更新用户界面以包括所生成的移动意图线。
9.尽管公开了多个实施例,但从以下详细描述中本领域技术人员将清楚当前公开主题的其他实施例,所述详细描述示出并描述了所公开主题的示例性实施例。因此,附图和详细描述在本质上被认为是说明性的而不是限制性的。
附图说明
10.本公开的上述和其他特征和优点以及它们的实现方式将通过参考结合附图对本发明实施例的以下描述而变得更加明显并更好理解,其中:
11.图1a示出具有由三个浮筒支撑的甲板的浮筒船的前视图。
12.图1b示出具有由两个浮筒支撑的甲板的另一浮筒船的前视图。
13.图2示出具有甲板和座椅的浮筒船的俯视图。
14.图3a示出根据本公开的方面的包括推力器系统的图1a的浮筒船的代表性俯视图。
15.图3b示出根据本公开的方面的包括另一推力器系统的图1b的浮筒船的代表性俯视图。
16.图3c示出根据本公开的方面的包括又一推力器系统的图1b的浮筒船的代表性俯视图。
17.图4示出用于控制推力器系统的示例性推力器输入控件的立体图。
18.图5示出图4的示例性推力器输入控件的俯视图。
19.图6示出如本文描述的用于浮筒船的示例性控制系统的框图。
20.图7示出用于使用一组推力器来控制移动的示例性方法的概述。
21.图8示出根据本文描述的方面的用于基于传感器数据使用一组推力器来控制移动的另一示例性方法的概述。
22.图9示出根据本文描述的方面的基于识别的条件来部署或收回推力器的示例性方法的概述。
23.图10和图11示出存在外力的情况下的浮筒船的示例性推力器系统行为。
24.图12a至图12c示出根据本文描述的方面的示例性用户界面方面。
25.对应的附图标记贯穿若干视图表示对应的部分。尽管附图表示本公开的实施例,但附图不一定按比例绘制,并且可能夸大某些特征以便更好地说明和解释本公开。本文中列出的示例示出本公开的实施例,并且此类示例不应被解释为以任何方式限制本公开的范围。
具体实施方式
26.为了促进对本公开的原理的理解,现在参考附图中所示的实施例,所述实施例描述如下。本文公开的实施例不旨在是穷举性的或将本公开限制为以下详细描述中公开的精确形式。相反,选择并描述实施例以使本领域的其他技术人员可利用他们的教导。因此,不意图由此限制本公开的范围。在所有若干视图中,对应的附图标记表示对应的部分。
27.本文公开的实施例可用于任何类型的水上船舶,包括浮筒船、单壳船和其他类型的水上船舶。作为示例,提供了示例性水上船舶,浮筒船100。
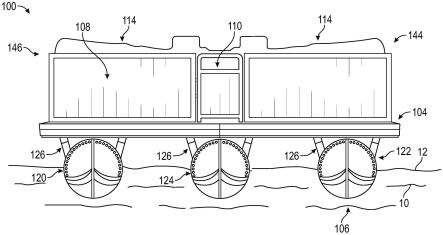
28.参考图1a,示例性浮筒船100漂浮在具有顶面12的水体10中。浮筒船100包括由多个浮筒106支撑的甲板104。甲板支撑围栏108,围栏108包括位于浮筒船100的船首部分112(见图2)的门110。浮筒船100还可包括多个座椅114、顶篷(未示出)和由甲板104支撑的其他部件。
29.参考图2,示出甲板104上座椅114的一种设想布置。还设想了其他布置。如图所示,浮筒船100还包括相机332,相机332被放置在浮筒船100的左舷船首角、左舷船尾角、右舷船
首角、右舷船尾角和两个纵向侧边处。在一个示例中,浮筒船100可包括360度视野相机,例如可定位在浮筒船100的顶篷支撑件的顶部上。
30.应当了解,多种附加或替代传感器中的任一种可用在类似于相机332的位置中,包括但不限于磁力计、陀螺仪、激光雷达系统、雷达系统、超声系统、压电管、回声测深仪、声脉冲、声学多普勒、声纳、惯性测量单元(imu)、毫米波系统和其他合适的传感器系统,以识别环境对象,诸如码头、船、浮标、水底、鱼和其他对象。例如,可使用此类传感器的组合,使得所示位置中的每一个包括一个或多个此类传感器。此外,相机332的位置作为示例示出,并且在其他示例中,可使用替代的、附加的或更少的位置。
31.图2进一步示出具有多个操作者控件的操作者控制台190,包括转向输入件(说明性地为方向盘192)、油门控件(说明性地为油门杆194)、推力器输入件(说明性地为推力器输入控件196)以及其他示例性控件。作为示例,方向盘192和油门杆194可用于控制舷外电机170,而推力器输入控件196可用于控制浮筒船100的推力器系统,诸如推力器系统300(例如,在图3中描绘为包括前推力器302和后推力器304)。下面更详细地讨论推力器系统300的附加方面。
32.返回图1a,多个浮筒106包括右舷浮筒120、左舷浮筒122和中心浮筒124。右舷浮筒120、左舷浮筒122和中心浮筒124中的每一者通过相应支架126支撑甲板104。右舷浮筒120、左舷浮筒122和中心浮筒124中的每一者将甲板104支撑在水10的顶面12上方。
33.尽管在图1a中示出三个浮筒,但多个浮筒106可限于两个浮筒或具有四个或更多个浮筒。例如,图1b示出省略中心浮筒124的另一示例,使得甲板104由右舷浮筒120和左舷浮筒122支撑。此外,尽管多个浮筒106被示出为在浮筒船100的全长上延伸,但在实施例中,多个浮筒106中的一个或多个被分成船首部分浮筒和船尾部分浮筒。应当了解,本文描述的推力器系统可与诸如单壳船舶等其他类型的水上船舶一起使用。
34.参考图3a,浮筒船100具有纵向中心线140和横向中心线142。纵向中心线140将浮筒船100分成浮筒船100的左舷侧144和浮筒船100的右舷侧146。横向中心线142将浮筒船100分成浮筒船100的船首部分148和浮筒船100的船尾部分150。浮筒船100的甲板104包括外周边149,该外周边149包括船首周边部分152、右舷周边部分154、船尾周边部分158和左舷周边部分156。多个浮筒106限定对应于左舷浮筒122的外部范围的左舷极端范围160和对应于右舷浮筒120的外部范围的右舷极端范围162。
35.浮筒船100包括延伸超出甲板104的船尾周边部分158的舷外电机170。在实施例中,舷外电机170是内燃机,它为螺旋桨(未示出)的旋转提供动力。螺旋桨可沿第一方向旋转以沿方向172向前推动浮筒船100,或沿第二方向旋转以沿方向174向后推动浮筒船100。在实施例中,舷外电机170相对于甲板104可旋转地安装,使得可调节螺旋桨的定向以使浮筒船100沿方向176和方向178中的一者转动。在实施例中,可提供多个舷外电机170。在一个示例中,多个舷外电机170可定位成与浮筒船100的船尾周边部分158相邻。尽管所示实施例是舷外电机170,但电机170也可以是至少部分地定位在浮筒船100的周边149内的舷内电机。作为另一示例,可使用任何数量的舷外电机。
36.图3a还包括前推力器302和后推力器304,它们形成推力器系统300的一部分。在示例中,与舷外电机170相比,推力器系统300可使浮筒船100具有更大的机动性。例如,前推力器302和/或后推力器304各自可以是可操纵的,以使操作者能够控制相关联的推力矢量。例
如,前推力器302可以是具有可用推力矢量307的固定推力器,其中,后推力器304可向前(例如,以产生朝向浮筒船100的右舷侧146的推力)或反向(例如,以产生朝向左舷侧144的推力)操作。因此,由前推力器302产生的推力可基本上垂直于浮筒船100的纵向中心线140。相比之下,后推力器304可以是可围绕相关联z轴旋转的可操纵推力器,如箭头309所示,以相应地控制推力矢量311。
37.应当了解,尽管推力器系统300在图3a中被示出为包括一个固定推力器和一个可操纵推力器,但可使用此类推力器的任何组合和配置。此外,浮筒船不必限于两个推力器并在其他示例中可包括附加或更少的推力器。
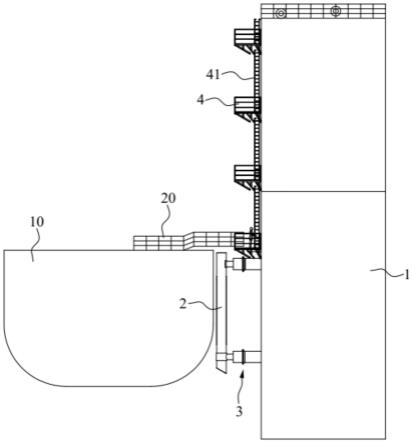
38.前推力器302和/或后推力器304可各自定位在中心浮筒124内。例如,前推力器302和/或后推力器304可具有至少部分位于水10的顶面12下方的一个或多个“使用”位置。相比之下,“停用”位置可以降低损坏和/或干扰的可能性的方式定位前推力器302和/或后推力器304(例如,使用浮筒船100的拖车或在浮筒船100在舷外电机170的驱动下运行时)。例如,推力器302和304可收回在中心浮筒124内。作为另一示例,推力器可具有多个使用位置,其中,推力器在可操纵使用位置(例如,当推力器完全伸展时)中用作可操纵推力器,而在固定使用位置(例如,当推力器部分收回时)中用作固定推力器。与此类推力器布置相关的附加方面由标题为“船用推力器布置”的美国申请no.16/889,272描述,所述美国申请的全部内容通过引用并入本文。
39.推力器放置不必限于在浮筒船100的一个或多个浮筒(例如,本示例中的浮筒122和120)内。例如,图1b和图3b示出一示例,其中结构303和305沿纵向中心线140定位以分别容纳或以其他方式将前推力器和后推力器联接至浮筒船100。在此类示例中,结构303和305可各自允许推力器旋转至水10中。例如,收回位置可以是推力器基本上平行于甲板104的位置。推力器可在一个或多个使用配置中朝向水10旋转,从而增加在推力器与甲板104之间形成的角度,并导致推力器进入水10和/或增加其相对于顶面12的深度。
40.应当了解,可使用多种其他技术中的任一种来联接、部署和/或收回推力器。作为另一示例,结构303和305可各自允许推力器的线性致动,使得推力器可沿基本上垂直于甲板104的轴线升高和降低。
41.类似地,尽管图3a和图3b示出推力器沿纵向中心线140定位的示例(例如,具有或不具有中心浮筒124),但推力器可根据多种其他范例中的任一种来定位。例如,在图3c中示出交错配置,其中,右舷浮筒120包括前推力器313,而左舷浮筒122包括后推力器315。此外,推力器系统300的推力器不需要与横向中心线142等同地间隔开,并且可使用浮筒内推力器(例如,推力器302、304、313和315)与外部推力器(例如,如上文关于结构303和305所讨论的)的任何组合。
42.图4示出用于控制推力器系统的示例性推力器输入控件196的立体图,而图5示出示例性推力器输入控件196的俯视图。如图所示,推力器输入控件196包括操纵杆402,操作者可使用操纵杆402来输入旋转(例如,如箭头404所示)和/或方向(例如,如箭头406所示)的指示。例如,经由操纵杆402接收的旋转输入可以是瞬时的,而经由操纵杆402接收的方向输入可以是成比例的。应当了解,在其他示例中,在多种其他组合中的任何一种中,旋转输入可以是成比例的并且方向输入可以是瞬时的。
43.推力器输入控件196还包括降低按钮408、启用按钮410、升高按钮412、漂移控制按
钮414、速度按钮416和码头保持按钮418。在示例中,降低按钮408和升高按钮412可用于控制前推力器302和后推力器304的位置。例如,降低按钮408可用于将推力器302和304从停用位置定位到使用位置,如上所述。启用按钮410可用于启用使用操纵杆402对推力器系统300进行的手动控制,从而使操作者能够使浮筒船100沿一个或多个轴线旋转和/或移动。
44.漂移控制按钮414可实现对推力器系统300的自动控制,使得推力器302和304用于通过抵消作用在浮筒船100上的外力(例如,风和/或水流)来保持浮筒船100的位置和/或航向。类似地,码头保持按钮418可保持浮筒船100的例如相对于诸如码头等检测到的对象的位置和航向。在其他示例中,可以使用上文关于图2讨论的相机332,基于地图数据和浮筒船100的相关联gps位置,和/或使用距离传感器来检测对象。
45.速度按钮416可控制由推力器系统300产生的相对速度或相对量的推力。作为示例,推力器系统300可具有一组相关联的速度(例如,快速、正常和慢速),使得速度按钮416可用于循环通过所述速度。速度按钮416可包括指示器,诸如指示推力器系统300当前使用的速度的一组灯。因此,当经由操纵杆402接收到用户输入时,所获得的由推力器系统300产生的推力可根据已使用速度按钮416选择的速度进行调整。
46.应当了解,推力器输入控件可具有附加、替代或更少的按钮。作为另一示例,可使用不同的输入控件作为操纵杆402的补充或替代。例如,触敏表面可用于接收用户输入并相应地识别方向和/或旋转输入。作为另一示例,可使用方向控制板。此外,尽管图2中描绘单个推力器输入控件196,但在推力器输入控件196包括在操作者控制台190中的示例中,类似技术可应用于存在多个推力器输入控件(例如,在浮筒船100的前部和后部)和/或存在可移除输入控件的情况。
47.例如,推力器输入控件196可以可移除地附接至操作者控制台190,使得操作者可拆卸推力器输入控件196。因此,操作者可在远离操作者控制台190时使用推力器输入控件196来控制推力器系统300,如在围绕障碍物操纵浮筒船100时或在停靠或拖曳浮筒船100时可能是这种情况。推力器输入控件196的形状可类似于浮筒船100,或可另外包括关于输入控件196的哪个区域与浮筒船100的前区域(和/或其他区域)相关联的视觉或触觉指示。
48.作为另一示例,推力器输入控件196可附接在多种其他位置中的任何位置处(例如,在浮筒船100内),例如在图2中的杯架116中的一个中。在此类示例中,推力器输入控件196与杯架116可相互转位(index),使得推力器输入控件196相对于浮筒船100正确地定向(例如,使得通过操纵杆402接收到的向前输入引起浮筒船100的向前移动)。在其他示例中,由推力器输入控件196接收的输入可基于推力器输入控件196相对于浮筒船100的定向和/或旋转来调整。
49.图6示出图1a至图1b的浮筒船的示例性控制系统的框图600。如图所示,浮筒船100的推进系统200包括舷外原动机204、推进控制器202、动力源208、通信控制器206、操作者界面210和传感器212。
50.推进系统200包括原动机204,在图2中说明性地为舷外电机170。示例性原动机包括舷外式电机、舷内式电机、内燃机、二冲程内燃机、四冲程内燃机、柴油发动机、电动机、混合发动机、喷射驱动式发动机和其他合适的动力源。推进系统200还包括动力源208。动力源的类型可取决于所使用的原动机的类型。在实施例中,原动机是内燃机,并且动力源是拉启动系统和电启动系统中的一种。在内燃机的情况下,推进系统200还会包括向内燃机提供燃
料和空气的燃料系统和进气系统。在实施例中,原动机204是电动机,并且动力源208是将一个或多个电池电联接至电动机的开关系统。在实施例中,原动机204是需要辅助泵和/或进水系统的基于喷射的发动机。
51.推进控制器202可根据操作者输入(例如,如可经由方向盘192和/或油门杆194接收)来控制舷外原动机204。因此,推进控制器202可控制舷外原动机204的定向。类似地,推进控制器202可控制由舷外原动机204产生的推力。作为示例,可使用液压系统(未示出),液压系统相对于甲板104定向舷外电机170。通过相对于甲板104转动舷外电机170,可改变浮筒船100的行进方向。在实施例中,舷外电机170是固定的,并且浮筒船100包括相对于甲板104定向以操纵浮筒船100的单独方向舵。
52.在示例中,推进控制器202处理由传感器212获得的数据,传感器包括但不限于相机系统、立体相机系统、诸如gps系统等位置确定器、加速度计、磁力计、陀螺仪、激光雷达系统、雷达系统、超声系统、压电管、回声测深仪、声脉冲、声学多普勒、声纳、惯性测量单元(imu)、毫米波系统和其他合适的传感器系统,以识别环境对象,诸如码头、船、浮标、水底、鱼和其他对象。应当了解,可使用多种附加或替代传感器中的任一种,诸如用于测量舷外原动机204的每分钟转数(rpm)的转速计或用于确定浮筒船100行进的速度的速度传感器。
53.操作者界面210包括至少一个输入装置和至少一个输出装置。示例性输入装置包括杆、按钮、开关、软键和其他合适的输入装置,它们可位于诸如操作者控制台190等操作者控制台中。示例性输出装置包括灯、显示器、音频设备、触觉设备和其他合适的输出装置。在实施例中,输出装置包括显示器,并且信息可被格式化并呈现在显示器上。在一个实施例中,输入装置和输出装置包括触摸显示器,并且信息可被格式化并呈现在触摸显示器上。示例性操作者输入包括触摸、拖动、敲击、捏合、展开和其他已知类型的手势。
54.通信控制器206通过网络606进行通信。网络606可包括有线网络和/或无线网络。作为示例,网络606包括can网络,使得通信控制器206被推进控制器202用于与浮筒船100的元件进行通信。在一个实施例中,can网络根据j1939协议实施。关于示例性can网络的细节在于2005年9月1日提交并作为美国公开专利申请no.us2007/0050095公开的序列号为11/218,163的美国专利申请中公开,所述美国专利申请的全部公开内容通过引用明确并入本文。当然,可使用任何合适类型的网络或数据总线来代替can网络。例如,网络606可包括nmea 2000总线,如可根据iec61162-3标准来实施。在一个实施例中,使用双线串行通信。作为另一示例,通信控制器206可使用以太网、wi-fi和/或蓝牙经由网络606进行通信。尽管图6被示出为包括单个网络606,但应当了解,在其他示例中,此类网络通信可在浮筒船100的控制器之间进行(例如,经由总线)和/或与浮筒船100外部的设备(诸如操作者设备604等)通信(例如,经由wi-fi或蓝牙)。
55.推力器系统300被示出为包括前推力器302、后推力器304、传感器306、推力器控制器308、通信控制器310和动力源312。与舷外原动机204类似,推力器302和304可以是多种电机或发动机中的任一种,使得动力源312可以是对应动力源。例如,推力器302和304可各自包括电动机,使得动力源312为它们的操作提供电能。作为示例,推力器系统300可用于操纵浮筒船100作为舷外原动机204的替代方案,或作为另一示例,舷外原动机204与推力器系统300可一起使用。例如,当停靠浮筒船100时,可使用推力器系统300代替舷外原动机204。
56.在示例中,推力器控制器308控制前推力器302和后推力器304的操作。例如,推力
器控制器308可控制由推力器302和/或304产生的位置、旋转和/或推力矢量。例如,推力器控制器308可经由网络606的总线与推力器302和304通信。因此,推力器系统300可扩展到任何数量的推力器,使得推力器控制器308可与这些推力器通信(例如,经由通信控制器310)并且因此经由总线控制这些推力器。在其他示例中,推力器控制器308可更直接地与推力器302和304通信(例如,经由有线连接或经由无线通信)。
57.在示例中,控制推力器302和304的输入是从可移除输入控件616接收的,可移除输入控件616的方面可类似于推力器输入控件196。在其他示例中,操作者可使用操作者设备604以经由操作者应用612来控制推力器系统300。在此类情况下,推力器系统300和操作者设备604可分别使用通信控制器310和通信控制器614来经由网络606进行通信。例如,操作者应用612可显示与推力器系统300相关联的信息,包括但不限于推力器302和304是否被部署、动力源312的充电状态、与传感器306相关联的信息(例如,所识别的障碍物或与行进方向相关联的相机馈送)、以及行进速度和/或方向。操作者应用612可被操作者用来部署推力器302和304以及相应地控制由推力器302和304产生的推力。示例性用户体验方面将在下文关于图12a至12c更详细地讨论。尽管这些方面是关于操作者设备604的操作者应用612描述的,但应当了解,类似的方面可用在操作者控制台190包括可呈现这种信息和/或可接收操作者输入的显示器的情况下。
58.传感器306可包括多种传感器中的任何一种,类似于上文描述的传感器212。在示例中,传感器212包括imu,推力器控制器308可使用imu来识别作用在浮筒船100上的外力。例如,当根据接收到的操作者输入来控制推力器302和304时,推力器控制器308可考虑外力。在此类示例中,与操作者输入相关联的目标矢量可根据识别到的外力进行调整,使得在存在强风和/或水流时操作者不需要过度操纵。应当了解,提供imu作为示例并且可使用附加或替代的传感器。例如,传感器306可包括gps或其他位置确定器,使得浮筒船100的地理位置可用于识别此类外力的存在。
59.推力器系统300还包括通信控制器310,通信控制器310的方面类似于上文描述的通信控制器206,并因此不必重新详细描述。在示例中,推力器系统300使用通信控制器310来与推进系统200通信或以其他方式接收来自推进系统200的通信。例如,推进控制器202可经由网络606传达推进系统200的发动机rpm、速度、电池电压或其他推进系统信息。
60.因此,推力器控制器308可使用推力器系统300的通信控制器310来获得此推进系统信息。在示例中,推力器控制器308可识别停用条件,停用条件指示推力器302和/或304应被放置在停用位置或收回位置。例如,低于预定充电阈值的电池电压可指示动力源208已在一点附近处耗尽,其中低于所述点舷外原动机204将无法操作和/或推力器302和304无法放置在停用位置中。例如,充电阈值可基于与启动舷外原动机204或收回推力器302和304相关联的电压(例如,以较大者为准)来确定。作为另一示例,高于预定阈值的发动机rpm和/或速度可与会损坏推力器302和304的条件相关联,使得它们可自动收回至停用位置中。在此类情况下,可评估速度和/或加速度。例如,即使在低速下,高加速度也可被识别为停用条件。在其他示例中可使用多种附加或替代停用条件中的任一个。
61.作为推力器系统300与网络606的集成的结果,推力器系统300可自动识别并对此类停用条件作出响应。这些方面在推力器系统300被提供作为浮筒船100的售后市场附加物的情况下可能是有益的。例如,作为安装过程的一部分,推力器系统300可与浮筒船100的总
线电联接,使得推力器系统300可经由总线获得此类信息并相应地执行处理。图600进一步被示出为包括定位设备602,定位设备602可在传感器212和306不包括位置确定器的情况下使用。相反,定位设备602可使用通信控制器610经由网络606进行通信,使得由位置确定器608生成的地理位置和/或速度信息相应地经由网络606提供。因此,推力器系统300可接收并使用来自多个源中的任何一个的信息,例如在识别停用条件时。
62.在一些示例中,推力器302和304可放置在或保持在使用位置,即使在舷外原动机204在操作中时。与上述停用条件类似,推力器控制器308可识别能量回收条件。例如,推力器控制器308可确定浮筒船100的速度和/或加速度低于预定回收阈值或在预定回收范围内,使得推力器302和304可放置至或保持在使用位置中。与推力器系统用于推进的情况相比,推力器系统可替代地配置成为相关联的动力源充电。在此类情况下,推力器302和304不由动力源312提供动力,而是可用于在浮筒船100移动穿过水10(例如,在舷外原动机204的动力下)时产生能量,从而为动力源312再充电。在一些情况下,识别这种能量回收条件可还包括评估动力源312的电压或充电状态,使得可在动力源312的充电状态低于预定阈值的情况下识别能量回收条件。
63.应当了解,停用条件与回收条件不需要相关联。例如,回收阈值可不同于停用阈值。在一些情况下,推力器302和304不需要收回以考虑浮筒船100的速度,或此类停用条件可以在相对较高的速度下发生(例如,低于该速度可能发生能量回收)。在示例中,推力器302和304可用于低速行进(例如,在舷外原动机204可处于空档时),而舷外原动机204可用于高速行进。因此,在舷外原动机204以此类更高的速度运行时推力器302和304可保持在使用位置,使得动力源312可相应地再充电。
64.尽管图600被示出为包括系统200和300(例如,分别具有控制器202和308),但应当了解,在其他示例中,此类方面可根据多种其他范例中的任何一个进行组合或分布。例如,在推力器系统300是添加至浮筒船100的售后市场系统的情况下,推力器控制器308可与推进控制器202分离。在浮筒船100预配备有推力器系统的其他示例中,中央控制器可包括类似于推进控制器202和推力器控制器308的功能。
65.图7示出用于使用一组推力器来控制移动的示例性方法700的概述。在示例中,方法700的方面可由推力器控制器执行以控制一组推力器。例如,推力器控制器308可执行方法700的方面来控制推力器302和304。方法700作为示例性方法被提供,用于一组推力器包括固定推力器和可操纵推力器的情况,类似于上文关于图3a至图3c所讨论的示例。
66.方法700开始于操作702,其中,接收用户输入。在示例中,从推力器输入控件(诸如推力器输入控件196或可移除输入控件616)接收用户输入。作为另一示例,可从执行操作者应用(诸如上文关于图6讨论的操作者设备604的操作者应用612)的操作者设备接收用户输入。用户输入可包括沿一个或多个轴线的旋转和/或移动的指示。
67.流程进行至操作704,其中,确定船的目标运动。例如,在接收到的用户输入包括旋转浮筒船的指示的情况下,目标运动可被确定为角目标运动类型。作为另一示例,如果接收到的输入指示横向和/或纵向移动,则可确定目标移动是平移移动类型。
68.流程进行至操作706,其中,获得传感器数据。例如,传感器数据可从上文关于图6讨论的传感器212和/或传感器306获得。在一些示例中,可使用诸如通信控制器310和网络606等通信控制器从总线或其他网络获得传感器数据。
69.在操作708处,确定船的实际运动。例如,实际运动可包括实际角速度(例如,如可由imu确定)。作为另一示例,实际运动可包括实际纵向和/或横向速度,如可基于船的速度和航向或基于gps信息等确定。操作706和708使用虚线框示出,以指示在其他示例中可省略操作706和708。例如,可执行操作708和710以考虑作用在浮筒船上的外力。
70.在确定710处,流程根据在操作704处确定的目标运动类型进行分支。如果目标运动类型是角目标运动类型,则流程从“角”分支至操作712,其中,生成固定推力器推力命令。在操作708处确定了船的实际运动的情况下,可基于实际角速度来生成推力命令,从而考虑船的现有角速度。因此,在接收到的用户输入指示旋转的情况下,在操作712处生成的推力命令使用固定推力器来相应地控制船的角速度。方法700在操作712处终止。
71.相反,在目标运动类型是平移目标运动类型的情况下,流程替代地从“平移”分支至操作714,其中,生成可操纵推力器角度命令。可基于由在操作702处接收到的用户输入指示的横向和/或纵向运动来生成可操纵推力器角度命令。在示例中,可操纵推力器角度命令是基于实际纵向和/或横向速度来生成的,如可能已经在操作708处确定。
72.流程进行至操作716,其中,生成可操纵推力器推力命令。类似于操作714,可基于由在操作702处接收到的用户输入指示的横向和/或纵向运动的幅度来生成推力命令。在示例中,可操纵推力器角度命令是基于实际纵向和/或横向速度来生成的,如可能已经在操作708处确定。在一些情况下,操作716还包括考虑由推力器输入控件指示的速度,例如,如可能已由上文关于图5讨论的推力器输入控件196的速度按钮416配置。方法700在操作716处终止。
73.尽管在接收用户输入以控制推力器系统的示例中描述了方法700,但应当了解,类似的技术可用于执行推力器系统的自动控制,例如在旋转和/或平移移动的指示在操作702处可替代地从控制器接收的情况下。
74.图8示出根据本文描述的方面的用于基于传感器数据使用一组推力器来控制移动的另一示例性方法800的概述。在示例中,方法800的方面可由推力器控制器执行以控制一组推力器。例如,推力器控制器308可执行方法800的方面来控制推力器302和304。尽管在接收用户输入以控制推力器系统的示例中描述了方法800,但应当了解,类似的技术可用于执行推力器系统的自动控制。
75.方法800开始于操作802,其中,接收用户输入。在示例中,从推力器输入控件(诸如推力器输入控件196或可移除输入控件616)接收用户输入。作为另一示例,可从执行操作者应用(诸如上文关于图6讨论的操作者设备604的操作者应用612)的操作者设备接收用户输入。用户输入可包括沿一个或多个轴线的旋转和/或移动的指示。
76.流程进行至操作804,其中,确定船的目标运动矢量。例如,接收到的输入可指示具有横向和/或纵向分量的移动(例如,根据图5中的箭头406),使得目标运动矢量的方向可以是横向分量和纵向分量的乘积。类似地,接收到的输入可指示移动的幅度,使得所确定的目标运动矢量相应地反映所指示的幅度。操作804可包括考虑经由推力器输入控件指示的速度,例如,如可能已由上文关于图5讨论的推力器输入控件196的速度按钮416配置。
77.流程进行至操作806,其中,获得传感器数据。例如,传感器数据可从上文关于图6讨论的传感器212和/或传感器306获得。在一些示例中,可使用诸如通信控制器310和网络606等通信控制器从总线或其他网络获得传感器数据。例如,所获得的传感器数据可来自
imu、磁力计和/或gps设备,从而可确定与外力相关联的信息。
78.在操作808处,确定船的实际运动矢量。例如,可基于在操作806处获得的传感器信息来确定船的速度和航向。
79.流程进行至确定810,其中,确定实际运动矢量是否不同于目标运动矢量。例如,如果一个或多个外力作用在浮筒船上,则浮筒船的实际运动可能不同于目标运动。差异可能与速度和/或航向有关。在示例中,可应用预定容差,使得预定容差内的实际运动与目标运动之间的差异在确定810处不会被识别为差异。
80.因此,如果未识别出差异,则流程从“否”分支至操作812,这将在下文讨论。相反,如果识别出差异,则流程替代地从“是”分支至操作814,在操作814中基于实际运动矢量来生成经调整的目标运动矢量。例如,可调整目标运动矢量的方向和/或幅度以反映目标运动矢量与实际运动矢量之间的差异。因此,与操作者在操作802中指示的方向和/或幅度相比,操作814可考虑作用在船上的外力。
81.流程进行至操作812,其中,相应地生成推力器命令。推力器命令可包括由推力器产生的推力的角度和/或幅度。在使用多个推力器的示例中,可生成多个推力器命令,每个推力器命令可不同。所生成的推力器命令可经由总线提供,如上文关于图6所描述的。流程在操作812处终止。
82.从操作812至操作806示出虚线箭头,以指示在一些示例中,方法800的方面可在没有附加或后续用户输入的情况下执行,例如根据先前确定的目标运动矢量。因此,可执行操作806至814以保持浮筒船的航向,直到接收到后续用户输入为止。因此,可执行方法800的多次迭代,其中的至少一些可包括通过确定810确定的操作814。
83.图9示出根据本文描述的方面的基于识别出的条件来部署或收回推力器的示例性方法的概述。在示例中,方法900的方面可由推力器控制器执行以控制一组推力器。例如,推力器控制器308可执行方法800的方面来控制推力器302和304。
84.方法900开始于操作902,其中,获得条件信息。例如,条件信息可从浮筒船的总线获得,如可通过上文关于图6讨论的通信控制器310从网络606获得。作为另一示例,推力器系统可包括传感器,诸如推力器系统300的传感器306。在另一示例中,条件信息可从诸如定位设备602等定位设备获得。条件信息可包括推进系统信息(例如,发动机rpm、速度或电池电压)或gps信息以及其他信息。
85.流程进行至确定904,其中,确定是否存在停用条件。例如,可根据一个或多个停用条件评估所获得的条件信息,例如与速度、发动机rpm和/或电池电压相关的那些条件信息。
86.因此,如果确定存在停用条件,则流程从“是”分支至确定906,在所述确定906处确定推力器系统的推力器是否被部署。在示例中,确定包括经由浮筒船的总线获得信息,如在推力器控制器经由总线与推力器通信时可能是这种情况。如果确定未部署推力器,则流程从“否”分支并在操作910处结束。
87.然而,如果确定推力器已部署,则流程替代地从“是”分支至操作908,其中,生成命令以收回推力器。类似于确定906,命令可经由总线传输,从而使推力器收回至停用位置。方法900在操作908处终止。
88.返回至确定904,如果替代地确定不存在停用条件,则流程从“否”分支至确定912,其中,确定是否存在回收条件。例如,可确定浮筒船的速度和/或加速度低于预定回收阈值
或在预定回收范围内。作为另一示例,确定912可包括确定推力器系统动力源(例如,上文关于图6讨论的推力器系统300的动力源312)的充电状态低于预定阈值。
89.如果确定不存在回收条件,则流程从“否”分支并在操作910处终止。相反,如果确定存在回收条件,则流程从“是”分支至操作914,在操作914处确定推力器系统的推力器是否被部署。这些方面类似于确定906,并因此不再详细描述。如果确定未部署推力器,则流程从“否”分支至操作916,其中,生成命令以部署推力器。类似于确定906和914,命令可经由总线传输,从而使推力器部署。在示例中,命令包括关于推力器应部署至的位置的指示。例如,与本文描述的使用位置相比,推力器可部署在减小的深度处。方法900在操作916处终止。
90.返回至确定914,如果确定推力器已经部署,则流程替代地从“是”分支并在操作918处终止。应当了解,描述了示例性条件,并且在其他示例中,可使用多种附加或替代条件和相关联条件信息中的任何一者来自动部署和/或收回推力器系统的推力器。
91.图10和图11示出存在外力的情况下的浮筒船的示例性推力器系统行为。首先参考图10,视图1000示出浮筒船100正经受外力,如箭头1002所示。类似于图3a至图3c,浮筒船100配备有两个推力器,每个推力器产生推力以推进浮筒船100,如箭头1004和1006所示。然而,由于外力,浮筒船100不是在向前方向上行进(例如,平行于箭头1004和1006),而是在平行于箭头1008的方向上行进。
92.相比之下,图11的视图1100示出推力器控制器应用与上文关于图8的方法800讨论的那些方面类似的方面的示例。因此,在存在上文在图10中讨论的相同外力的情况下,推力器替代地在考虑外力的方向上推进浮筒船100,如箭头1104和1106所示。因此,与图10的箭头1004和1006相比,推力器已经调整以考虑外力,使得浮筒船100在平行方向1108上行进。
93.图12a至图12c示出根据本文描述的方面的示例性用户界面方面。此类用户界面方面可由操作者设备的操作者应用实现,诸如上文关于图6讨论的操作者设备604的操作者应用612。在其他示例中,这些方面可类似地经由操作者控制台(诸如上文讨论的操作者控制台190)处的显示器呈现给浮筒船的操作者。
94.如图12a所示,用户界面1200包括停靠选项卡1202,其中,轮廓1214描绘了相关联浮筒船(例如,浮筒船100)的轮廓。用户界面1200更具体地与设置过程相关联,如由致动的设置用户界面元件1204所示。因此,操作者可对推力器系统的各个方面进行配置,例如输入与浮筒船相关联的梁尺寸1206和长度1208。
95.用户界面1200进一步被示出为包括传感器位置1210和1212。在示例中,操作者可对每个传感器位置进行配置,并且如图所示,传感器位置1210当前被选择以进行配置。因此,在制造后安装推力器系统的情况下,操作者可将传感器布置在给定配置中,并接着可使用类似于用户界面1200的界面来配置推力器系统。例如,操作者可沿轮廓1214拖放传感器位置1210,或作为另一示例,可输入传感器1210与其他邻近传感器之间的距离。因此,应当了解,可使用多种配置技术和相关联的用户体验范例中的任何一者。
96.现在转到图12b,用户界面1240示出使用推力器系统的示例。如图所示,用户界面1240包括操纵杆元件1242、推力器元件1244和1246、障碍物指示器1248和移动意图线1250。在存在推力器输入控件的示例中(例如,除了此类用户界面方面),操纵杆元件1242可以图形方式表示在推力器输入控件(例如,上文关于图4和图5讨论的推力器输入控件196的操纵杆402)处接收到的输入。在一些示例中,操纵杆元件1242可仅在经由推力器输入控件接收
到用户输入时存在。在其他示例中,操作者可使用操纵杆元件1242来提供用于控制如本文描述的推力器系统的用户输入。
97.可包括推力器元件1244和1246以提供关于由相关联推力器产生的力的幅度和方向的指示。尽管用户界面1240被示出为包括两个推力器元件1244和1246,但应当了解,可包括附加或更少的此类元件,如在浮筒船具有附加或更少的推力器时可能是这种情况。
98.障碍物指示器1248显示关于检测到的障碍物的指示(例如,可由诸如上文关于图6讨论的传感器212或传感器306等传感器检测)。在示例中,传感器可能已经使用上文关于图12a讨论的用户界面1200来配置。如图所示,障碍物指示器1248可根据检测到的与浮筒船(例如,如轮廓1214所表示)的邻近度进行颜色编码。在传感器数据不可用的情况下(例如,由于障碍物离传感器太远而无法检测),障碍物指示器被示出为逐渐消失。
99.应当了解,可使用多种其他图形技术中的任何一种来传达检测到的障碍物,包括所识别的障碍物的不同颜色方案和图形描述(例如,如可使用计算机视觉技术识别)。此外,用户界面1240可用于传达附加或替代类型的障碍物和信息,诸如从浮筒船100下方的地形检测的深度信息或地图数据(例如,如可从本地数据存储或从互联网访问)。此外,可使用类似的技术来呈现来自浮筒船的一个或多个相机的图像数据,从而使操作者能够在根据本文描述的方面操纵浮筒船的同时查看浮筒船的环境。
100.移动意图线1250被示出为具有与轮廓1214(并且延伸地与浮筒船100)的形状基本相似的形状的虚线。在示例中,根据接收到的用于控制推力器系统的用户输入来更新移动意图线1250的位置。例如,如图所示,移动意图线1250指示接收到用户输入以将浮筒船100移向左舷船尾角,这与操纵杆元件1242传达的用户输入一致。
101.作为经由推力器输入控件的用户输入的补充或替代,移动意图线1250可由操作者使用触摸屏来操纵。例如,操作者可在期望行进方向上拖动移动意图线。作为另一示例,操作者可使用两个手指来指示期望的旋转。在接收到触摸输入的情况下,移动意图线1250的颜色可改变或可提供另一指示以指示用户当前正在控制推力器系统。
102.因此,移动意图线1250提供关于从操作者接收到的输入的二维图形表示,使得操作者可更好地理解所提供的输入将如何由推力器系统处理和实现。与障碍物指示器1248相结合,移动意图线1250和推力器系统的可能的相关联移动使操作者能够与更常规地使用舷外原动机相比更好地操纵浮筒船。
103.图12c示出示例性图1280,它示出传感器数据与所得障碍物指示器之间的关联。在当前示例中,传感器1212可用于识别在某一弧线1288内检测到障碍物的距离。因此,可能难以检测障碍物是在传感器正前方还是偏离中心。因此,在单个传感器识别障碍物的情况下,可生成类似于障碍物指示器1284的障碍物指示器。障碍物指示器1284与浮筒船的图形表示的距离增加并最终消失(例如,由于在弧线1288内未检测到障碍物),从而提供可被操作者解释为具有某种不确定性程度的障碍物的指示。相比之下,障碍物指示器1286是基于来自多个传感器的传感器数据来生成的。如图所示,障碍物指示器1286以与相关联传感器的检测弧1290相交的方式生成。因此,由于来自附加传感器的数据,障碍物指示器1286的形状可以更接近于障碍物的实际形状。
104.应当了解,本文描述的方面可用于各种环境中的任何一者,例如在停靠、绕过障碍物导航或在深度减小的区域中操控时。这些方面不必限于控制推力器系统,并可类似地用
于控制舷外原动机,作为推力器系统的补充或替代。作为另一示例,类似于上文关于图12a至图12c所讨论的用户界面方面的用户界面方面可用于浮筒船至少部分地在自动控制下操作的情况。例如,类似于图12b的用户界面的用户界面可使操作者能够限定浮筒船要行进的路线和/或在自动操作期间对所识别的障碍物作出响应。标题为“用于定位水上船舶的系统和方法”的美国申请no.17/032,300描述了可应用本公开的方面的附加情况,所述美国申请的全部内容出于所有目的通过引用并入本文。
105.尽管本公开的这些方面已经被描述为具有示例性设计,但本发明可在本公开的精神和范围内进一步修改。因此,本技术旨在涵盖使用其一般原理的本发明的任何变化、用途或修改。此外,本技术旨在涵盖属于本发明所属领域的已知或惯常实践的与本公开的偏离。
106.提供以下条项作为公开主题的示例性方面:
107.1.一种浮筒船,包括:多个浮筒;甲板,由所述多个浮筒支撑,所述甲板具有外周边;推进系统,具有推进所述浮筒船通过水的至少一个原动机;推力器系统,包括第一推力器和第二推力器,其中,所述第一推力器或所述第二推力器中的至少一个推力器具有停用位置和使用位置;以及控制器,通信地联接至所述第一推力器和所述第二推力器,所述控制器配置为:识别第一条件;基于所述第一条件,将所述至少一个推力器配置为处于所述使用位置;识别第二条件;以及基于所述第二条件,将所述至少一个推力器配置为处于所述停用位置。
108.2.根据条项1所述的浮筒船,还包括可移除地联接至所述甲板的操作者控制台的可移除推力器输入控件,其中,所述可移除推力器输入控件通信地联接至所述控制器。
109.3.根据条项2所述的浮筒船,其中,所述第一条件是基于经由所述可移除推力器输入控件接收到的用户指示识别的,以启用所述推力器系统。
110.4.根据条项2至3中任一项所述的浮筒船,其中,所述第二条件是基于经由所述可移除推力器输入控件接收到的用户指示识别的,以停用所述推力器系统。
111.5.根据条项1至4中任一项所述的浮筒船,其中,识别所述第一条件包括确定所述浮筒船的速度低于预定阈值。
112.6.根据条项1至5中任一项所述的浮筒船,其中,识别所述第一条件包括:确定所述推力器系统的动力源低于预定阈值;以及基于确定所述动力源低于所述预定阈值,将所述推力器系统配置为在所述至少一个原动机推进所述浮筒船通过水时使用由所述推力器系统产生的电流来为所述动力源充电。
113.7.根据条项1至6中任一项所述的浮筒船,还包括由所述多个浮筒支撑的多个传感器,并且其中,所述第二条件是基于来自所述多个传感器中的至少一个传感器的传感器数据识别的。
114.8.根据条项7所述的浮筒船,其中:所述多个传感器包括全球定位系统或惯性测量单元中的至少一者;并且所述控制器还配置为:使用所述多个传感器来确定实际运动;确定所述实际运动不同于目标运动;以及基于确定所述实际运动不同于所述目标运动来:基于所述实际运动来调整目标运动以生成经调整的目标运动;以及基于所述经调整的目标运动向所述第一推力器和所述第二推力器中的至少一者提供命令。
115.9.根据条项8所述的浮筒船,其中,所述控制器还配置为:基于从可移除推力器输入控件接收到的用户输入来确定所述目标运动。
116.10.根据条项8至9中任一项所述的浮筒船,其中:所述实际运动是平移运动或旋转运动中的至少一者;并且所述目标运动是平移运动或旋转运动中的至少一者。
117.11.根据条项1至10中任一项所述的浮筒船,其中,所述控制器经由网络连接通信地联接至所述推进系统的推进控制器。
118.12.根据条项11所述的浮筒船,其中,识别所述第二条件包括:经由与所述推进控制器的网络连接获得推进系统信息;确定推进系统信息超过预定阈值。
119.13.根据条项11至12中任一项所述的浮筒船,其中,识别所述第二条件包括确定所述推进系统的动力源低于预定阈值。
120.14.根据条项1至13中任一项所述的浮筒船,其中,所述第一推力器是固定推力器,并且所述第二推力器是可操纵推力器。
121.15.根据条项14所述的浮筒船,其中:所述第一推力器定位在所述浮筒船的前部;并且所述第二推力器定位在所述浮筒船的后部。
122.16.根据条项15的浮筒船,其中,所述第一推力器和所述第二推力器沿所述浮筒船的纵向中心线定位。
123.17.根据条项1至16中任一项所述的浮筒船,其中,所述控制器使用所述浮筒船的网络总线通信地联接至所述第一推力器和所述第二推力器。
124.18.一种用于浮筒船的推力器系统,包括:第一推力器;第二推力器;多个传感器;以及控制器,所述控制器配置为:经由所述浮筒船的网络总线获得与所述浮筒船的推进系统相关联的推进系统信息;基于所述推进系统信息来识别条件;以及基于所述识别的条件,将所述第一推力器和所述第二推力器中的至少一个推力器配置为处于使用位置或停用位置。
125.19.根据条项18所述的推力器系统,其中,识别所述条件包括:确定所述推进系统信息指示所述浮筒船的速度低于预定阈值;以及将所述至少一个推力器配置为处于所述使用位置。
126.20.根据条项18所述的推力器系统,其中,识别所述条件包括:确定所述推进系统信息超过预定阈值;以及将所述至少一个推力器配置为处于所述停用位置。
127.21.根据条项18至20中任一项所述的推力器系统,还包括可移除推力器输入控件,所述可移除推力器输入控件配置为可移除地联接至所述浮筒船,其中,所述可移除推力器输入控件通信地联接至所述控制器。
128.22.根据条项21所述的推力器系统,其中,所述控制器还配置为:从所述可移除推力器输入控件接收用户输入;使用所述多个传感器来确定实际运动;确定所述实际运动不同于与所述接收到的用户输入相关联的目标运动;以及基于确定所述实际运动不同于所述目标运动来:基于所述实际运动调整目标运动以生成经调整的目标运动;以及基于所述经调整的目标运动向所述第一推力器和所述第二推力器中的至少一者提供命令。
129.23.根据条项22所述的推力器系统,其中:所述实际运动是平移运动或旋转运动中的至少一者;并且所述目标运动是平移运动或旋转运动中的至少一者。
130.24.根据条项18至23中任一项所述的推力器系统,其中,所述第一推力器是固定推力器,并且所述第二推力器是可操纵推力器。
131.25.根据条项18所述的推力器系统,其中,所述控制器配置为使用所述浮筒船的网
络总线通信地联接至所述第一推力器和所述第二推力器。
132.26.一种用于生成与推力器系统相关联的用户界面的方法,所述方法包括:呈现与浮筒船相关联的轮廓;接收指示所述浮筒船的目标移动的用户输入;基于所接收到的所述用户输入,生成与所述轮廓相关联的移动意图线,其中,所述移动意图线指示目标移动方向、目标移动幅度或目标移动旋转中的至少一者;以及更新所述用户界面以包括所生成的所述移动意图线。
133.27.根据条项26所述的方法,还包括:从所述浮筒船的多个传感器获得传感器数据;使用所述传感器数据来识别障碍物;生成与所述障碍物相关联的障碍物指示;以及更新所述用户界面以包括所生成的所述障碍物指示。
134.28.根据条项27所述的方法,其中:所述障碍物是基于来自多个传感器的传感器数据来识别的;并且所生成的所述障碍物指示与多个传感器位置相关联地显示,所述多个传感器位置与多个传感器相关联。
135.29.根据条项26至28中任一项所述的方法,其中,所述用户输入是经由触敏显示器接收的,所述触敏显示器上呈现所述用户界面。
136.30.根据条项26至29中任一项所述的方法,其中,所述用户输入是从可移除推力器输入控件接收到的。
137.31.根据条项30所述的方法,其中,所述用户界面还包括指示接收到的所述用户输入的操纵杆元件。
138.32.根据条项26至31中任一项所述的方法,其中,所述用户界面还包括多个推力器元件,每个推力器元件与所述推力器系统的推力器相关联。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。