1.本发明涉及电磁对接技术领域,特别涉及一种电磁对接系统及电磁对接控制方法。
背景技术:
2.日益复杂的在轨维护与构建等任务,对在轨对接技术提出了更高的要求。传统的航天器采用的对接技术存在冲击力大、羽流污染、推进剂消耗及光学干扰等问题,而基于电磁力控制的电磁对接技术,可以避免以上缺点,并通过非接触、连续、可逆以及同步控制能力,实现两航天器的柔性对接与安全分离,具有广阔的应用前景。基于此,开展电磁对接技术研究以对我国航天设备的在轨对接应用提供技术支持。
3.由于一对电磁线圈产生的电磁场为开域电磁场,磁场的强弱和距离的三次方成反比,因此可用于电磁对接的范围十分有限。为适应不同的初始位姿,拓宽电磁对接的有效范围,则需要采用带铁芯的电磁线圈产生足够大的电磁力。同时,在实际卫星在轨运动场景中,卫星呈现的是6自由度的运动状态,而传统的一对电磁线圈只能提供单个自由度的电磁力。因此现有的电磁对接系统普遍存在电磁力较小、对接过程中相对位置容差和相对速度容差较小,鲁棒性不高等问题。另外,现有的电磁对接还存在结构复杂等缺点。
技术实现要素:
4.本发明要解决的技术问题是为了克服现有技术中电磁对接系统结构复杂、对接效果差的缺陷,提供一种电磁对接系统及电磁对接控制方法。
5.本发明是通过下述技术方案来解决上述技术问题:
6.本发明提供一种电磁对接系统,所述电磁对接系统包括目标电磁装置和追踪电磁装置;
7.所述目标电磁装置包括第一控制器、第一主体结构、设置于所述第一主体结构的第一对接端面上的目标电磁线圈和第一连接组件,所述目标电磁线圈和所述第一控制器电连接;所述追踪电磁装置包括第二控制器、第二主体结构、设置于所述第二主体结构的第二对接端面上的追踪电磁线圈和第二连接组件,所述追踪电磁线圈和所述第二控制器电连接;
8.所述第一控制器用于生成第一目标电信号以驱动所述目标电磁线圈,所述第二控制器用于生成第二目标电信号以驱动所述追踪电磁线圈;
9.所述目标电磁线圈和所述追踪电磁线圈之间根据所述第一目标电信号以及所述第二目标电信号产生目标电磁力,所述第一连接组件与所述第二连接组件根据所述目标电磁力进行对接或分离。
10.较佳地,所述目标电磁装置还包括第一固定结构,所述目标电磁线圈通过所述第一固定结构固设在所述第一对接端面上;和/或,
11.所述追踪电磁装置还包括第二固定结构,所述追踪电磁线圈通过所述第二固定结
构固设在所述第二对接端面上。
12.较佳地,所述第一固定结构包括第一壳体,所述目标电磁线圈通过螺钉固设在所述第一壳体的上下板材之间,所述第一壳体通过螺钉固定在第一对接端面上;和/或,
13.所述第二固定结构包括第二壳体,所述追踪电磁线圈通过螺钉固设在所述第二壳体的上下板材之间,所述第二壳体通过螺钉固定在第二对接端面上。
14.较佳地,所述目标电磁线圈和所述追踪电磁线圈为圆环状的线圈结构。
15.较佳地,所述第一连接组件包括若干个第一连接单元,所述第二连接组件包括若干个第二连接单元,
16.每个所述第一连接单元与一个所述第二连接单元配合连接。
17.较佳地,所述第一连接单元包括导向锥杆,所述第二连接单元包括导向锥孔;或,
18.所述第一连接单元包括导向锥孔,所述第二连接单元包括导向锥杆。
19.较佳地,若干个所述第一连接单元全部布设在圆环状的所述目标电磁线圈内部、全部布设在圆环状的所述目标电磁线圈外部、或一部分布设在圆环状的所述目标电磁线圈内部,剩余部分布设在圆环状的所述目标电磁线圈外部,每个所述第二连接单元的位置与所述第一连接单元的位置对应布设。
20.较佳地,所述目标电磁装置还包括固设于所述第一对接端面上的激光发射器,所追踪标电磁装置还包括固设于所述第二对接端面上的激光接收器;或,所述目标电磁装置还包括固设于所述第一对接端面上的激光接收器,所追踪标电磁装置还包括固设于所述第二对接端面上的激光发射器;
21.所述第一控制器和/或第二控制器根据所述激光接收器和所述激光接收器采集得到所述目标电磁装置和所述追踪电磁装置之间的相对对接距离;所述第一控制器用于根据在所述相对对接距离和设定阈值生成第一目标电信号以驱动所述目标电磁线圈,所述第二控制器用于根据在所述相对对接距离和设定阈值生成第二目标电信号以驱动所述追踪电磁线圈。
22.较佳地,所述目标电磁装置还包括固设于所述第一连接组件上的第一锁止部件,所述追踪电磁装置还包括固设于所述第二连接组件上的第二锁止部件;
23.所述第一控制器用于在所述相对对接距离小于或者等于所述设定阈值时,生成第三目标电信号以驱动所述目标电磁线圈,所述第三目标电信号大于所述第一目标电信号;
24.所述第二控制器用于在所述相对对接距离小于或者等于所述设定阈值时,生成第四目标电信号以驱动所述追踪电磁线圈,所述第四目标电信号大于所述第二目标电信号;
25.所述目标电磁线圈和所述追踪电磁线圈之间根据所述第三目标电信号以及所述第四目标电信号产生目标电磁力以驱动所述第一锁止部件和所述第二锁止部件执行锁止操作。
26.较佳地,所述目标电磁线圈和所述追踪电磁线圈包括线圈结构和铁芯结构;
27.所述铁芯结构的内侧、外侧和靠近对接端面的至少一侧设有铜材质制成的所述线圈结构。
28.较佳地,所述第一控制器包括第一无线通信模块,所述第二控制器包括第二无线通信模块,所述第一控制器与所述第二控制器之间通过所述第一无线通信模块和所述第二无线通信模块进行相互无线通信和/或与上位机进行数据传输。
29.较佳地,所述第一对接端面与所述第二对接端面平行设置;和/或,
30.所述目标电磁装置和所述追踪电磁装置均包括卫星。
31.本发明提供一种电磁对接控制方法,所述电磁对接控制方法采用上述的电磁对接系统实现;所述电磁对接控制方法包括:
32.所述第一控制器生成第一目标电信号以驱动所述目标电磁线圈;
33.所述第二控制器生成第二目标电信号以驱动所述追踪电磁线圈;
34.所述目标电磁线圈和所述追踪电磁线圈之间根据所述第一目标电信号以及所述第二目标电信号产生目标电磁力,所述第一连接组件与所述第二连接组件根据所述目标电磁力进行对接或分离。
35.较佳地,所述目标电磁装置还包括固设于所述第一对接端面上的激光发射器,所追踪标电磁装置还包括固设于所述第二对接端面上的激光接收器;或,所述目标电磁装置还包括固设于所述第一对接端面上的激光接收器,所追踪标电磁装置还包括固设于所述第二对接端面上的激光发射器;
36.所述电磁对接控制方法还包括:
37.根据所述激光接收器和所述激光接收器采集得到所述目标电磁装置和所述追踪电磁装置的相对对接距离;
38.在所述相对对接距离大于设定阈值时,生成第一目标电信号以驱动所述目标电磁线圈,并生成第二目标电信号以驱动所述追踪电磁线圈;
39.在所述相对对接距离小于或者等于所述设定阈值时,确定所述第一控制器和/或所述第二控制器的所述第一连接组件和所述第二连接组件连接到位。
40.较佳地,所述目标电磁装置还包括固设于所述第一连接组件上的第一锁止部件,所述追踪电磁装置还包括固设于所述第二连接组件上的第二锁止部件;
41.在所述相对对接距离小于或者等于所述设定阈值时,所述电磁对接控制方法还包括:
42.所述第一控制器生成第三目标电信号以驱动所述目标电磁线圈,所述第三目标电信号大于所述第一目标电信号;
43.所述第二控制器生成第四目标电信号以驱动所述追踪电磁线圈,所述第四目标电信号大于所述第二目标电信号;
44.所述目标电磁线圈和所述追踪电磁线圈之间根据所述第三目标电信号以及所述第四目标电信号产生目标电磁力以驱动所述第一锁止部件和所述第二锁止部件执行锁止操作。
45.在符合本领域常识的基础上,所述各优选条件,可任意组合,即得本发明各较佳实施例。
46.本发明的积极进步效果在于:
47.本发明中,通过在两个电磁装置的对接端面上分别设置电磁线圈以及连接组件,并通过各自的控制器的电信号驱动两个电磁线圈之间产生大小可控的电磁吸力,目标电磁装置和追踪电磁装置之间通过连接组件初步连接,并在连接到位后继续驱动电磁线圈通电,产生磁锁所需的磁感应强度以完成锁止操作,从而完成整个对接过程,该电磁对接装置具有结构简单、对接过程稳定,即实现柔性对接以及安全分离,且对接效率高,在实现提供
足够大的电磁力的同时,也保证对接过程中较大的相对速度容差和相对位置容差,有效地提高了系统的鲁棒性。
附图说明
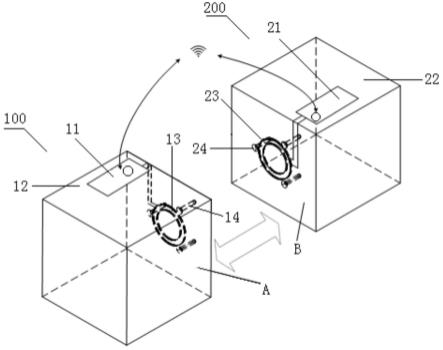
48.图1为本发明实施例1的电磁对接系统的结构示意图。
49.图2为本发明实施例2的电磁对接系统中固定结构以及电磁线圈的第一结构示意图。
50.图3为本发明实施例2的电磁对接系统中固定结构以及电磁线圈的第二结构示意图。
51.图4为本发明实施例2的电磁对接系统中固定结构以及电磁线圈的第三结构示意图。
52.图5为本发明实施例2的电磁对接系统中固定结构的第一结构示意图。
53.图6为本发明实施例2的电磁对接系统中固定结构的第二结构示意图。
54.图7为本发明实施例2的电磁对接系统中电磁线圈的第一截面图。
55.图8为本发明实施例2的电磁对接系统中电磁线圈的第二截面图。
56.图9为本发明实施例2的电磁对接系统中追踪电磁装置的结构示意图。
57.图10为本发明实施例2的电磁对接系统中目标电磁装置的结构示意图。
58.图11为本发明实施例3的电磁对接控制方法的流程图。
具体实施方式
59.下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。实施例1
60.如图1所示,本实施例的电磁对接系统包括目标电磁装置和追踪电磁装置;
61.目标电磁装置100包括第一控制器11、第一主体结构12、设置于第一主体结构12的第一对接端面a上的目标电磁线圈13和第一连接组件14,目标电磁线圈13和第一控制器11电连接。
62.追踪电磁装置200包括第二控制器21、第二主体结构22、设置于第二主体结构22的第二对接端面b上的追踪电磁线圈23和第二连接组件24,追踪电磁线圈23和第二控制器21电连接;
63.第一控制器11用于生成第一目标电信号以驱动目标电磁线圈13,第二控制器21用于生成第二目标电信号以驱动追踪电磁线圈23;
64.目标电磁线圈13和追踪电磁线圈23之间根据第一目标电信号以及第二目标电信号产生目标电磁力,第一连接组件14与第二连接组件24根据目标电磁力进行对接或分离。
65.通过各自的控制器生成的电信号驱动两个电磁线圈之间产生大小可控的电磁吸力或电磁斥力(图1中的箭头表示对接和分离方向),通过提供足够大的电磁力,使得目标电磁装置100和追踪电磁装置200之间能够实现柔性对接或安全分离。
66.在一可实施例的方案中,第一对接端面a与第二对接端面b平行设置。
67.本实施例中的目标电磁装置100和追踪电磁装置200可以均是航天器或者列车车厢等大型设备,目标电磁装置100和追踪电磁装置200可以分别是扫地机器人、对应的充电
装置等家用设备,目标电磁装置100和追踪电磁装置200还可以是玩具。目标电磁装置100和追踪电磁装置200还可以为其他任何需要配置有电磁线圈且需要电磁对接的设备。
68.本实施例中,通过在两个电磁装置的对接端面上分别设置电磁线圈以及连接组件,并通过各自的控制器的电信号驱动两个电磁线圈之间产生大小可控的电磁吸力,目标电磁装置和追踪电磁装置之间通过连接组件初步连接,并在连接到位后继续驱动电磁线圈通电,产生磁锁所需的磁感应强度以完成锁止操作,从而完成整个对接过程,该电磁对接装置具有结构简单、对接过程稳定,即实现柔性对接以及安全分离,且对接效率高,在实现提供足够大的电磁力的同时,也保证对接过程中较大的相对速度容差和相对位置容差,有效地提高了系统的鲁棒性。
69.实施例2
70.本实施例的电磁对接系统是对实施例1的进一步改进,具体地:
71.如图2-6所示,本实施例的目标电磁装置100还包括第一固定结构15,目标电磁线圈13通过第一固定结构15固设在第一对接端面a上;
72.追踪电磁装置200还包括第二固定结构25,追踪电磁线圈23通过第二固定结构25固设在第二对接端面b上。
73.具体地,第一固定结构15包括第一壳体16,目标电磁线圈13通过螺钉固设在第一壳体16的上下板材之间,第一壳体16通过螺钉固定在第一对接端面a上;
74.第二固定结构25包括第二壳体26,追踪电磁线圈23通过螺钉固设在第二壳体26的上下板材之间,第二壳体26通过螺钉固定在第二对接端面b上。其中,如图5和图6中的c为用于线圈走线的结构单元。
75.当然,第一壳体16和第二壳体26还可以通过其他固定方式固定在对应的对接端面上,目标电磁线圈13和追踪电磁线圈23也可以通过其他固定方式固定在对应的壳体上,只要能够实现对应结构的固定即可。
76.第一固定结构15和第二固定结构25还可以设计为其他的结构类型,只要能够实现对应电磁线圈固设在对接端面上且不造成干扰等情况即可。
77.另外,第一固定结构15和第二固定结构25均采用不导磁材质制成,如塑料材质。
78.进一步地,如图7和8所示,目标电磁线圈13和追踪电磁线圈23包括线圈结构300和铁芯结构400。线圈结构绕制或者套设在铁芯结构上。
79.铁芯结构400的内侧、外侧和靠近对接端面的至少一侧设有铜材质制成的线圈结构300。
80.在一可实施例的方案中,目标电磁线圈13和追踪电磁线圈23为圆环状的线圈结构300。
81.第一连接组件14包括若干个第一连接单元,第二连接组件24包括若干个第二连接单元,每个第一连接单元与一个第二连接单元配合连接。
82.在一可实施例的方案中,第一连接单元包括导向锥杆,第二连接单元包括导向锥孔;或,
83.第一连接单元包括导向锥孔,第二连接单元包括导向锥杆。
84.当然,第一连接单元和第二连接单元还可以其他配合结构,只要能够进行配合实现两个电磁装置之间的对接固定即可。
85.若干个第一连接单元全部布设在圆环状的目标电磁线圈13内部、全部布设在圆环状的目标电磁线圈13外部、或一部分布设在圆环状的目标电磁线圈13内部,剩余部分布设在圆环状的目标电磁线圈13外部,每个第二连接单元的位置与第一连接单元的位置对应布设。
86.目标电磁装置100还包括固设于第一对接端面a上的激光发射器(图中未示出),所追踪标电磁装置还包括固设于第二对接端面b上的激光接收器;或,目标电磁装置100还包括固设于第一对接端面a上的激光接收器,所追踪标电磁装置还包括固设于第二对接端面b上的激光发射器;
87.第一控制器11和/或第二控制器21根据激光发射器和激光接收器采集得到目标电磁装置100和追踪电磁装置200之间的相对对接距离;第一控制器11用于根据在相对对接距离和设定阈值生成第一目标电信号以驱动目标电磁线圈13,第二控制器21用于根据在相对对接距离和设定阈值生成第二目标电信号以驱动追踪电磁线圈23。
88.通过上述布设的激光发射器和激光接收器,或其他类型的位置检测传感器及时检测两个电磁装置之间的位置,一旦两个电磁装置之间的位置小于设定值时则表明两者对接成功,进而执行下一步的锁止操作;否则,继续基于控制器输出对应的电信号驱动对应的电磁线圈继续产生电磁吸力,直至两个电磁装置之间对接成功。
89.如图9和图10所示,目标电磁装置100还包括固设于第一连接组件14上的第一锁止部件17,追踪电磁装置200还包括固设于第二连接组件24上的第二锁止部件27;
90.第一控制器11用于在相对对接距离小于或者等于设定阈值时,生成第三目标电信号以驱动目标电磁线圈13,第三目标电信号大于第一目标电信号;
91.第二控制器21用于在相对对接距离小于或者等于设定阈值时,生成第四目标电信号以驱动追踪电磁线圈23,第四目标电信号大于第二目标电信号;
92.目标电磁线圈13和追踪电磁线圈23之间根据第三目标电信号以及第四目标电信号产生目标电磁力以驱动第一锁止部件和第二锁止部件执行锁止操作。
93.第一锁止部件和第二锁止部件构成磁锁,一旦第一锁止部件和第二锁止部件之间的磁感应强度满足锁紧条件则立即执行锁止操作,此时可以在两个电磁线圈中输入最大控制电压以保证及时有效地执行锁紧,有效地保证了对接效率和可靠性。
94.另外,第一控制器11包括第一无线通信模块18,第二控制器21包括第二无线通信模块28,第一控制器11与第二控制器21之间通过第一无线通信模块和第二无线通信模块进行相互无线通信和/或与上位机进行数据传输。
95.本实施例的电磁对接系统对应的整个对接过程包括三个对接阶段:(1)导向锥杆准备进入导向锥孔前;(2)导向锥杆准备进入导向锥孔后;(3)导向锥杆到达导向锥孔的对接位置后,执行锁止操作以完成整个对接过程。
96.对于(1)导向锥杆准备进入导向锥孔前,通过第一控制器11和第二控制器21分别生成对应的目标电信号并输出至对应电磁线圈,并在两个电磁线圈之间提供大小可控的电磁吸力,通过该电磁吸力导向锥杆开始进入导向锥孔;
97.对于(2)导向锥杆准备进入导向锥孔后,继续给目标电磁线圈13和追踪电磁线圈23之间通电,第一控制器11和第二控制器21继续生成对应的目标电信号并输出至对应电磁线圈,此时导向锥杆和导线锥孔伴随对应的电磁线圈内的电磁力相互之间发生碰撞,不断
调节非对接轴向的位置和姿态角,进而保证对接过程中较大的相对速度容差和相对位置容差;直至激光发射器和激光接收器确定目标电磁线圈13和追踪电磁线圈23的对接距离满足条件时,则确定目标电磁装置100和追踪电磁装置200之间对接成功;
98.对于(3)导向锥杆到达导向锥孔的对接位置后,通过第一控制器11和第二控制器21分别生成更大的电信号并输出至对应电磁线圈,以快速提供磁锁所需的磁感应强度以及时有效地完成磁锁的锁紧操作,进而完成整个对接操作过程。
99.本实施例中,通过在两个电磁装置的对接端面上分别设置电磁线圈以及连接组件,并通过各自的控制器的电信号驱动两个电磁线圈之间产生大小可控的电磁吸力,目标电磁装置和追踪电磁装置之间通过连接组件初步连接,并在连接到位后继续驱动电磁线圈通电,产生磁锁所需的磁感应强度以完成锁止操作,从而完成整个对接过程,该电磁对接装置具有结构简单、对接过程稳定,即实现柔性对接以及安全分离,且对接效率高,在实现提供足够大的电磁力的同时,也保证对接过程中较大的相对速度容差和相对位置容差,有效地提高了系统的鲁棒性。
100.实施例3
101.本实施例的电磁对接控制方法基于实施例1或2中的电磁对接控制方法实现。
102.如图11所示,本实施例的电磁对接控制方法包括:
103.s101、第一控制器生成第一目标电信号以驱动目标电磁线圈;
104.s102、第二控制器生成第二目标电信号以驱动追踪电磁线圈;
105.s103、目标电磁线圈和追踪电磁线圈之间根据第一目标电信号以及第二目标电信号产生目标电磁力,第一连接组件与第二连接组件根据目标电磁力进行对接或分离。
106.通过各自的控制器生成的电信号驱动两个电磁线圈之间产生大小可控的电磁吸力或电磁斥力,通过提供足够大的电磁力,使得目标电磁装置和追踪电磁装置之间能够实现柔性对接或安全分离。
107.当目标电磁装置还包括固设于第一对接端面上的激光发射器,所追踪标电磁装置还包括固设于第二对接端面上的激光接收器;或,目标电磁装置还包括固设于第一对接端面上的激光接收器,所追踪标电磁装置还包括固设于第二对接端面上的激光发射器;
108.本实施例的电磁对接控制方法还包括:
109.根据激光发射器和激光接收器采集得到目标电磁装置和追踪电磁装置的相对对接距离;
110.在相对对接距离大于设定阈值时,生成第一目标电信号以驱动目标电磁线圈,并生成第二目标电信号以驱动追踪电磁线圈;
111.在相对对接距离小于或者等于设定阈值时,确定第一控制器和/或第二控制器的第一连接组件和第二连接组件连接到位。
112.目标电磁装置还包括固设于第一连接组件上的第一锁止部件,追踪电磁装置还包括固设于第二连接组件上的第二锁止部件。
113.通过上述布设的激光发射器和激光接收器,或其他类型的位置检测传感器及时检测两个电磁装置之间的位置,一旦两个电磁装置之间的位置小于设定值时则表明两者对接成功,进而执行下一步的锁止操作;否则,继续基于控制器输出对应的电信号驱动对应的电磁线圈继续产生电磁吸力,直至两个电磁装置之间对接成功。
114.在相对对接距离小于或者等于设定阈值时,本实施例的电磁对接控制方法还包括:
115.第一控制器生成第三目标电信号以驱动目标电磁线圈,第三目标电信号大于第一目标电信号;
116.第二控制器生成第四目标电信号以驱动追踪电磁线圈,第四目标电信号大于第二目标电信号;
117.目标电磁线圈和追踪电磁线圈之间根据第三目标电信号以及第四目标电信号产生目标电磁力以驱动第一锁止部件和第二锁止部件执行锁止操作
118.本实施例的电磁对接控制方法对应的整个对接过程包括三个对接阶段:(1)导向锥杆准备进入导向锥孔前;(2)导向锥杆准备进入导向锥孔后;(3)导向锥杆到达导向锥孔的对接位置后,执行锁止操作以完成整个对接过程。
119.对于(1)导向锥杆准备进入导向锥孔前,通过第一控制器和第二控制器分别生成对应的目标电信号并输出至对应电磁线圈,并在两个电磁线圈之间提供大小可控的电磁吸力,通过该电磁吸力导向锥杆开始进入导向锥孔;
120.对于(2)导向锥杆准备进入导向锥孔后,继续给目标电磁线圈和追踪电磁线圈之间通电,第一控制器和第二控制器继续生成对应的目标电信号并输出至对应电磁线圈,此时导向锥杆和导线锥孔伴随对应的电磁线圈内的电磁力相互之间发生碰撞,不断调节非对接轴向的位置和姿态角,进而保证对接过程中较大的相对速度容差和相对位置容差;直至激光发射器和激光接收器确定目标电磁线圈和追踪电磁线圈的对接距离满足条件时,则确定目标电磁装置和追踪电磁装置之间对接成功;
121.对于(3)导向锥杆到达导向锥孔的对接位置后,通过第一控制器和第二控制器分别生成更大的电信号并输出至对应电磁线圈,以快速提供磁锁所需的磁感应强度以及时有效地完成磁锁的锁紧操作,进而完成整个对接操作过程。
122.本实施例中,通过在两个电磁装置的对接端面上分别设置电磁线圈以及连接组件,并通过各自的控制器的电信号驱动两个电磁线圈之间产生大小可控的电磁吸力,目标电磁装置和追踪电磁装置之间通过连接组件初步连接,并在连接到位后继续驱动电磁线圈通电,产生磁锁所需的磁感应强度以完成锁止操作,从而完成整个对接过程,该电磁对接装置具有结构简单、对接过程稳定,即实现柔性对接以及安全分离,且对接效率高,在实现提供足够大的电磁力的同时,也保证对接过程中较大的相对速度容差和相对位置容差,有效地提高了系统的鲁棒性。
123.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。