1.本发明涉及切断系统、切断装置及切割器单元。
背景技术:
2.目前,已知有切断粘贴在基板等工件上的树脂制膜等的切断装置。
3.作为这种切断装置,例如,已知有在基板上粘贴层压膜时,对照基板的长度而切断层压膜的装置等。
4.此外,与切断装置相关的技术例如记载于专利文献1中。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2010-208311号公报
技术实现要素:
8.发明要解决的技术课题
9.但是,近年来,开始利用具有曲面形状等复杂形状的基板等,当切断粘贴在这种基板上的膜时,在用切割辊连续地切断、或者使切割器直线移动而将膜切断的现有方法中,难以恰当地将膜切断。
10.另外,在将粘贴在复杂形状的基板上的膜中、从基板的端缘伸出的膜切断时,在膜的一端成为自由端的情况下,无法以施加张力而将膜切断为前提的方法。
11.即,在切断膜等片状部件的现有技术中,有时无法恰当地切断片状的部件。
12.本发明的课题在于实现一种更恰当地切断片状的部件的技术。
13.用于解决技术课题的手段
14.为了解决上述课题,本发明一实施方式所涉及的切断系统,其特征在于,具备:
15.切断装置,其具备:
16.主体,其具有使旋转刀旋转的电动机;以及
17.切割器单元,其具备容纳所述旋转刀的一部分的壳体和与所述壳体连结并容纳所述旋转刀的另一部分的引导部,在所述壳体与所述引导部之间具有供切断对象物导入的切断用空间;
18.以及
19.输送装置,其使所述切断装置和所述切断对象物相对移动,
20.所述旋转刀的一部分在所述切断用空间内露出,所述切断装置中的所述切割器单元相对于所述主体可拆装。
21.发明效果
22.根据本发明,能够实现一种更恰当地切断片状的部件的技术。
附图说明
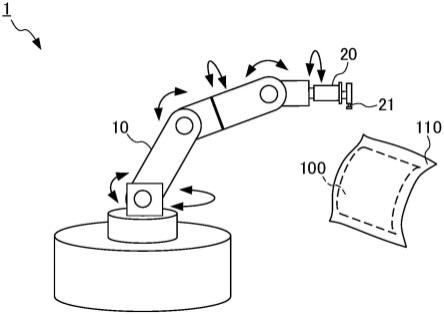
23.图1是表示本发明所涉及的切断系统1整体的结构的示意图。
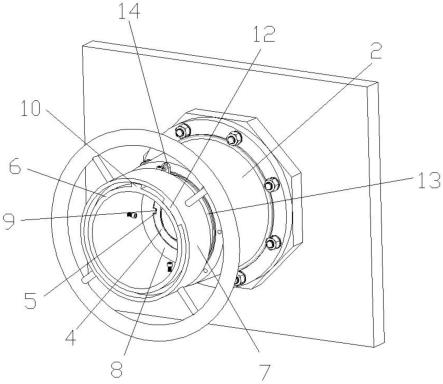
24.图2是表示切断装置20的具体结构例的示意图(分解图)。
25.图3是表示壳体22的结构例的示意图(分解图及完成图)。
26.图4是表示将主体20a和切割器单元20b设为可拆装的结构例的示意图。
27.图5是表示切断系统1将切断对象物切断时的作用的示意图。
28.图6是表示可实现双向切断的切断系统1的结构例的示意图。
29.图7是表示切割器单元20b的变形例的示意图。
30.图8是表示切割器单元20b的变形例的示意图。
具体实施方式
31.下面,参照附图对本发明的实施方式进行说明。
32.[第一实施方式]
[0033]
[结构]
[0034]
图1是表示本发明所涉及的切断系统1整体的结构的示意图。
[0035]
切断系统1是切断膜110的装置,特别是具有能够将粘贴在具有立体形状(局面形状等)的工件100上的膜110以任意的姿势沿着工件100容易地切断的结构。
[0036]
此外,在以下说明中,称为膜110的部件包括粘贴在工件100上的各种部件,例如,包括称为薄膜、封印纸、片材、网等的粘贴物。
[0037]
如图1所示,切断系统1具备多关节机器人10和切断装置20。
[0038]
多关节机器人10(输送装置)例如由六轴垂直多关节机器人等构成,通过安装切断装置20,将切断装置20控制为任意的位置及姿势,切断粘贴在工件100上的膜110。
[0039]
切断装置20具有通过电动机旋转的旋转刀21,将膜110一边夹入一边切断。
[0040]
在切断装置20中,成为如下结构:旋转刀21被切割器单元20b(后述)覆盖,并且切割器单元20b的一部分开口,旋转刀21的一部分从开口的部分露出。而且,在切断膜110时,安装有切断装置20的多关节机器人10一边改变切断装置20的姿势一边移动。由此,能够将膜110一边夹入切割器单元20b的开口部,一边用旋转刀21切断。
[0041]
图2是表示切断装置20的具体结构例的示意图(分解图)。
[0042]
如图2所示,在切断系统1中,切断装置20的主体20a和切割器单元20b由连结部20c连结,主体20a和切割器单元20b具有可拆装的结构。
[0043]
主体20a内置有使旋转刀21旋转的电动机30,电动机30的旋转轴30a从主体20a的端面突出。在电动机30的旋转轴30a上设置有与设置在旋转刀21的旋转轴21a上的齿轮21b啮合的齿轮30b。
[0044]
切割器单元20b具备旋转刀21、壳体22以及引导部23。
[0045]
旋转刀21通过以旋转轴21a为中心旋转,将切断对象物(在此为膜110)切断。在旋转刀21的旋转轴21a上设置有齿轮21b,齿轮21b与设置在电动机30的旋转轴30a上的齿轮30b啮合,由此将电动机30的驱动力传递给旋转刀21。
[0046]
在本实施方式中,旋转刀21的旋转轴21a与电动机30的旋转轴30a平行设置,因此,旋转刀21在平行于主体20a的端面的面内旋转。
[0047]
壳体22构成为在内部具备容纳旋转刀21的空间的板状部件。在本实施方式中,壳体22成为容纳旋转刀21的直径的1/2以上、并且使旋转刀21的一部分从壳体22露出的结构。另外,在壳体22的背面形成有供旋转刀21的旋转轴21a插通的贯通孔22a。
[0048]
图3是表示壳体22的结构例的示意图(分解图及完成图)。
[0049]
如图3所示,壳体22具备支承部件221、背面侧板状体222以及正面侧板状体223。
[0050]
支承部件221成为支承背面侧板状体222及正面侧板状体223的支承体,在中央具有内径比旋转刀21的直径大的圆形的中空部221a。另外,在支承部件221的一端侧(图3中的下端侧),形成有不存在包围中空部221a的部件的部分(以下,称为“开放部221b”。)。
[0051]
背面侧板状体222是覆盖支承部件221的背面侧的板状部件,成为覆盖旋转刀21的直径的1/2以上(例如,直径的3/4)的形状。背面侧板状体222的一端侧(图3中的下端侧)配置于与支承部件221的形成有开放部221b的部分的边界(图3中的开放部221b的上端)。另外,在背面侧板状体222上,在安装在支承部件221上的情况下,在与支承部件221中的中空部221a的中心对置的部分,形成有供旋转刀21的旋转轴21a插通的贯通孔222a。
[0052]
正面侧板状体223是覆盖支承部件221的正面侧的板状部件,与背面侧板状体222同样,成为覆盖旋转刀21的直径的1/2以上(例如,直径的3/4)的形状。另外,正面侧板状体223的一端侧(图3中的下端侧)与背面侧板状体222同样,配置在与支承部件221的形成有开放部221b的部分的边界(图3中的开放部221b的上端)。
[0053]
如果夹着支承部件221而设置背面侧板状体222及正面侧板状体223,则成为如下结构:背面侧板状体222及正面侧板状体223夹着并覆盖至支承部件221上的开放部221b的上端,并且比开放部221b更靠前端侧(图3中的下端侧)从背面侧板状体222及正面侧板状体223突出。以下,将支承部件221中的从背面侧板状体222及正面侧板状体223突出的部分称为突出支承部221c。
[0054]
引导部23是设置于支承部件221中的突出支承部221c的大致长方体形状的部件,具备成为供旋转刀21的一部分(图3中的下端部分)旋转的空间的槽部23a。引导部23成为如下结构:当其设置于突出支承部221c时,一端侧(图3中的下端侧)作为覆盖旋转刀21的外缘的保护部件发挥作用,并且另一端侧(图3中的上端侧)在与背面侧板状体222及正面侧板状体223的一端侧(图3中的下端侧)之间形成用于供膜110通过的空隙,将膜110引导至旋转刀21。
[0055]
成为如下结构:当引导部23设置于支承部件221的突出支承部221c时,旋转刀21的一部分在形成于背面侧板状体222及正面侧板状体223与引导部23之间的空间(以下,称为“切断用空间s”。)露出。
[0056]
在本实施方式中,切断用空间s中的不存在支承部件221的一侧(即,开放的一侧)成为供切断对象物(膜110)插入的开口部。在壳体22及引导部23中,成为形成切断用空间s的开口部的部分以越靠近开口部的端部(开口端),开口部的开口宽度越扩大的方式设置了倾斜的结构。由此,可实现易于将切断对象物导入切断用空间s中的结构。此外,为了防止操作者的身体与旋转刀21接触,期望的是,开口部的形状设为人的手指等不会与旋转刀21接触的开口部的开口宽度及从开口部到旋转刀21的距离。
[0057]
另外,在切断用空间s中,旋转刀21与引导部23所成的角度设为锐角,并且旋转刀21的旋转方向成为将切断对象物从切断用空间s的开口部向内部拉入的方向。由此,产生由
旋转刀21和引导部23夹入切断对象物的作用,即使在未对切断对象物施加张力的状态下,也能够一边对切断部分施加局部的张力,一边进行顺畅的切断。
[0058]
进而,被切断的切断对象物在通过旋转刀21的两侧之后,通过突出支承部221c的两侧,但是由于突出支承部221c仅具有支承部件221的厚度,因此不会产生使切断后的切断对象物过度分离的作用等,能够抑制使切断对象物的品质降低的可能性。
[0059]
此外,突出支承部221c只要具有相对于壳体22支承引导部23的强度即可,因此也可以设为在维持强度的范围内比支承部件221的其他部分薄壁化。另外,只要使切断后的切断对象物恰当地通过突出支承部221c的两侧,同时确保相对于壳体22支承引导部23的强度即可,因此也可以将突出支承部221c的靠近旋转刀21的一侧形成得较薄,构成为距离旋转刀21越远变得越厚的形状(例如,具有锥度的形状等)。此外,也可以设为用强度比支承部件221的其他部分高的部件构成突出支承部221c、在确保强度的同时能够薄壁化的结构。例如,可以用不锈钢构成突出支承部221c,用铝构成支承部件221的其他部分等。
[0060]
[切断系统的拆装功能]
[0061]
在具有如上所述的结构的切断系统1中,主体20a和切割器单元20b成为可容易拆装的结构。
[0062]
图4是表示将主体20a和切割器单元20b设为可拆装的结构例的示意图。
[0063]
作为组装主体20a和切割器单元20b的结构,例如,可设为使螺钉p从切割器单元20b的正面侧板状体223侧贯通连结部20c而拧紧固定于主体20a的端面的结构。
[0064]
在设为这种结构的情况下,在因刀的劣化等而更换旋转刀21时,不用取出旋转刀21就能够将切割器单元20b卸下更换。
[0065]
此外,除了将切割器单元20b拧紧在主体20a上的连结部20c的结构以外,还可以设为如下结构:在主体20a的端面与切割器单元20b的背面侧板状体222之间形成嵌合结构,在使用时将嵌合结构嵌入进行组装,并且在更换切割器单元20b时等,通过释放嵌合结构而将切割器单元20b从主体20a上卸下。
[0066]
[作用]
[0067]
图5是表示切断系统1将切断对象物切断时的作用的示意图。
[0068]
如图5所示,在切断系统1中,可安装切断装置20作为多关节机器人10的工具,一边通过多关节机器人10任意地控制切断装置20的位置及姿势,一边将切断对象物(膜110)切断。
[0069]
在图5所示的例子中,示出了将粘贴在由具有曲面的立体形状的基板(玻璃基板等)构成的工件100上的膜110沿着工件100的周缘切断的状态。
[0070]
在切断系统1切断膜110时,通过吸附粘贴有膜110的工件100等,成为工件100被保持在作为多关节机器人10的动作范围的空间中的状态。
[0071]
此时,膜110的从工件100伸出的周缘部成为一端为自由端且未被施加张力的状态。
[0072]
针对这种状态的膜110,多关节机器人10使电动机30旋转而使切断装置20移动,使膜110从开口部与旋转刀21接触。
[0073]
此时,越靠端部,开口部的开口宽度越扩大,因此能够容易地导入膜110。
[0074]
于是,通过基于旋转刀21的旋转的拉入作用,膜110被拉入到切断用空间s内部,并
且由于旋转刀21与引导部23所成的角为锐角,因此被施加局部的张力(膜110抵抗向槽部23a的拉入而产生的张力),膜110被顺畅地切断。
[0075]
另外,当多关节机器人10使切断装置20沿膜110的切断方向行进时,切断后的膜110通过旋转刀21的两侧及突出支承部221c的两侧而向切断装置20的后方(图5的空心箭头的方向)移动。
[0076]
此时,由于突出支承部221c仅具有支承部件221的厚度,因此不会产生使切断后的膜110过度分离的作用等,能够抑制使膜110的品质降低的可能性。
[0077]
此外,多关节机器人10在动作范围内,能够在任意的位置及姿势进行切断,因此即使工件100的形状复杂,也能够沿着工件100的周缘恰当地切断膜110。
[0078]
如上所述,本实施方式的切断系统1将具有切断用空间s的切割器单元20b安装于多关节机器人10,多关节机器人10一边将切割器单元20b控制在任意的位置及姿势,一边通过一部分在切断用空间s内露出的旋转刀21将粘贴在工件100上的膜110的不要的部分切断。
[0079]
另外,切断用空间s的开口部的开口宽度扩大,并且旋转刀21与构成切断用空间s的部件(引导部23)所成的角度设为锐角,旋转刀21的旋转方向成为将切断对象物从切断用空间s的开口部向内部拉入的方向。
[0080]
因此,能够容易地将膜110导入切断用空间s,并且产生用旋转刀21和引导部23夹入膜110的作用,即使在未对膜110施加张力的状态下,也能够一边对切断部分施加局部的张力,一边进行顺畅的切断。
[0081]
因此,根据切断系统1,能够更恰当地切断片状的部件。
[0082]
另外,由于是旋转刀21被容纳在壳体22及引导部23内且仅一部分在切断用空间s露出的结构,因此能够抑制操作者的身体(手指等)与旋转刀21接触的情况。
[0083]
另外,由于被切断且通过了旋转刀21的两侧的膜110通过仅具有支承部件221的厚度的突出支承部221c的两侧,因此不会产生使切断后的膜110过度分离的作用等,能够抑制使切断后的膜110的品质降低的可能性。
[0084]
另外,在切断系统1中,成为切断装置20和工件100难以干扰的结构。即,切断装置20的主体20a相对于切断用空间s的位置向与引导部23相反的一侧(例如,在图4中为上侧)偏移而配置。因此,根据切断系统1,能够在靠近工件100的端缘的位置切断膜110。
[0085]
此外,由于旋转刀21的旋转面与主体20a的端面平行,因此在作为多关节机器人10的工具安装了主体20a的情况下,与多关节机器人10的臂伸缩的方向相比,能够增大在多关节机器人10旋转的方向上的移动而进行切断。因此,能够提高多关节机器人10对切断装置20的位置及姿势的控制的自由度。
[0086]
另外,根据切断系统1,在两面粘贴有膜110的基板等工件100中,在切断粘贴于一个面上的膜110的端部时,能够仅将粘贴于接近的面(表面及背面)上的膜110中、作为切断对象的膜110可靠地从切断用空间s的开口部引导至内部,并恰当地切断膜110。
[0087]
[变形例1]
[0088]
在上述实施方式中,设为以下结构进行了说明:切断装置20的切割器单元20b具备突出支承部221c及引导部23,设置于突出支承部221c的引导部23覆盖从壳体22突出的旋转刀21的一部分(图3中的下端部分)。
[0089]
与此相对,切割器单元20b不具备突出支承部221c及引导部23,而是与具备供从壳体22突出的旋转刀21嵌入并可移动的槽的切断台组合,由此得到可实现双向切断的切断系统1。
[0090]
图6是表示可实现双向切断的切断系统1的结构例的示意图。
[0091]
在图6所示的结构例中,切断系统1具备输送装置10b、切断装置20以及切断台d。
[0092]
切断装置20的切割器单元20b在如上所述不具备突出支承部221c及引导部23、且旋转刀21从壳体22突出这一点上,与第一实施方式的切割器单元20b不同。
[0093]
输送装置10b例如可由直动动作的气缸等构成。而且,在输送装置10b上安装切断装置20,输送装置10b通过直动动作使切断装置20双向移动。但是,也可以通过多关节机器人10使切断装置20直动动作。
[0094]
在切断台d上形成有供旋转刀21嵌入的槽,输送装置10b使切断装置20移动,以使旋转刀21在切断台d的槽内移动。
[0095]
由此,能够实现适合于连续地切断从卷筒抽出的膜110的情况等沿着同方向的直线连续地切断膜110的情况的结构。
[0096]
另外,在这种结构的情况下,能够在将膜110按压于切断台d上并施加张力的状态下进行切断。
[0097]
此外,在这种结构中,也可以将切割器单元20b设为相对于主体20a可拆装的结构,从而容易地更换旋转刀21。
[0098]
[变形例2]
[0099]
在上述实施方式中,对电动机30的旋转轴与旋转刀21的旋转轴平行的切断装置20的结构例进行了说明,但不限于此。
[0100]
例如,也可以设为以下结构:将电动机30的旋转轴的旋转力经由齿轮(锥齿轮等)弯曲90度而传递给旋转刀21,旋转刀21在与主体20a的端面垂直的面内旋转。
[0101]
在该情况下,使切断时的切断装置20的移动方向与上述实施方式不同,而且与上述的实施方式同样地,能够将膜110容易地导入切断用空间s中,并且产生用旋转刀21和引导部23夹入膜110的作用,即使在未对膜110施加张力的状态下,也能够一边对切断部分施加局部的张力,一边进行顺畅的切断。
[0102]
[变形例3]
[0103]
在上述实施方式中,举出切割器单元20b中的突出支承部221c配置在旋转刀21的正后方(膜110的移动方向上的旋转刀21的下游正后方)的情况为例进行了说明,但不限于此。即,也可以设为切割器单元20b中的突出支承部221c与旋转刀21隔开间隔配置。
[0104]
图7是表示切割器单元20b的变形例的示意图。
[0105]
如图7所示,本变形例的切割器单元20b相对于图3所示的切割器单元20b,从旋转刀21的正后方隔开规定距离(例如,几厘米左右)的间隔配置有突出支承部221c。旋转刀21的正后方与突出支承部221c之间成为不存在部件的空间(以下,称为“膜流下空间”。),被旋转刀21切断的膜110刚切断后就在膜流下空间内移动。
[0106]
因此,刚被旋转刀21切断后的膜110在膜流下空间内移动而不会夹着具有厚度的部件,在从膜110的基于旋转刀21的切断位置离开固定距离的阶段,通过突出支承部221c的两侧。
[0107]
因此,由于刚切断后的膜110夹着具有厚度的部件,因此能够防止膜110在比旋转刀21的切断位置靠前的位置裂开等。
[0108]
另外,在切断系统1中,切断装置20的主体20a相对于切断用空间s的位置,向与引导部23相反的一侧(例如,在图4中为上侧)偏移而配置。
[0109]
因此,在将图7所示的切割器单元20b安装于主体20a的情况下,相对于工件100在任意的方向(主体20a位于工件100侧的方向及主体20a位于与工件100相反的一侧的方向)上,都能够切断膜110。
[0110]
[变形例4]
[0111]
在上述实施方式中,举出切割器单元20b上的突出支承部221c位于旋转刀21的正后方(膜110的移动方向上的旋转刀21的下游正后方)的情况为例进行了说明,但不限于此。即,如变形例3所示的例子,也可以设为在旋转刀21的正后方设置不存在部件的膜流下空间,并且使突出支承部221c的后端向与主体20a相反的一侧弯曲。
[0112]
图8是表示切割器单元20b的变形例的示意图。
[0113]
如图8所示,本变形例的切割器单元20b相对于图7所示的切割器单元20b,从旋转刀21的正后方隔开规定距离(例如,几厘米左右)的间隔配置有突出支承部221c的支承部件221的后端(膜110的移动方向上的下游侧的端部)向与主体20a相反的一侧弯曲(沿着上下方向的折线弯折)。
[0114]
即,旋转刀21的下游侧成为不存在部件的膜流下空间,膜流下空间的后端开放,并且在弯曲的支承部件221的前端,突出支承部221c与下端部(设置引导部23的部分)相连。
[0115]
因此,粘贴在工件100上的膜110被旋转刀21切断之后,在膜流下空间内移动,从后端的开放的部分排出。由此,粘贴在工件100上的膜110被旋转刀21切断之后,不会与部件接触。
[0116]
另外,被旋转刀21切断的切掉端的膜110随着切断的进行,一边避开弯曲的支承部件221的后端一边移动。
[0117]
因此,能够防止由于切断后的膜110与部件接触而产生灰尘或者使产品的品质降低。
[0118]
此外,本发明可在起到本发明的效果的范围内适当地进行变形、改进等,不限定于上述实施方式。
[0119]
例如,多关节机器人10等输送装置除了使切断装置20移动而将切断对象物(膜110等)切断以外,还可使切断对象物相对于切断装置20移动或者使切断对象物及切断装置20一起移动等、使切断对象物和切断装置20以各种方式相对移动,将切断对象物切断。
[0120]
另外,可设为将上述实施方式及变形例的结构适当组合而成的结构。
[0121]
例如,可将变形例1的可沿双向切断的切割器单元20b设为如变形例2那样使电动机30的旋转轴的旋转力弯曲90度而传递给旋转刀21的结构。
[0122]
如上所述,本实施方式中的切断系统1具备多关节机器人10和切断装置20,切断装置20具备主体20a和切割器单元20b。
[0123]
主体20a具有使旋转刀21旋转的电动机30。
[0124]
切割器单元20b具备容纳旋转刀21的一部分的壳体22和与壳体22连结并容纳旋转刀21的另一部分的引导部23,在壳体22与引导部23之间具有供切断对象物(膜110)导入的
切断用空间s。
[0125]
多关节机器人10使切断装置20和切断对象物相对移动。
[0126]
旋转刀21的一部分在切断用空间s内露出,切断装置20中的切割器单元20b相对于主体20a可拆装。
[0127]
由此,通过将膜110导入切断用空间s中,产生用旋转刀21和引导部23夹入膜110的作用,即使在未对膜110施加张力的状态下,也能够一边对切断部分施加局部的张力,一边进行顺畅的切断。
[0128]
因此,根据切断系统1,能够更适当地切断片状的部件。
[0129]
切割器单元20b中的切断用空间s的开口部越靠近开口端,开口宽度越扩大。
[0130]
由此,能够将切断对象物容易地导入切断用空间s中。
[0131]
切割器单元20b的与切断用空间s的开口部相反侧的部分(突出支承部221c)构成为比其他部分薄。
[0132]
由此,不会产生使切断后的切断对象物过度分离的作用等,能够抑制使切断后的切断对象物的品质降低的可能性。
[0133]
切割器单元20b的与切断用空间s的开口部相反侧的部分(突出支承部221c)具有距离切断用空间s越远变得越厚的结构。
[0134]
由此,能够确保连结壳体22和引导部23的支承力,并且不会产生使切断后的切断对象物过度分离的作用等,能够抑制使切断后的切断对象物的品质降低的可能性。
[0135]
切割器单元20b的与切断用空间s的开口部相反侧的部分(突出支承部221c)与旋转刀21隔开间隔配置,在与旋转刀21之间形成有不存在部件的空间(膜流下空间)。
[0136]
由此,刚被旋转刀21切断后的膜110在膜流下空间内移动而不会夹着具有厚度的部件,在从膜110的基于旋转刀21的切断位置离开固定距离的阶段,通过突出支承部221c的两侧。
[0137]
因此,通过刚切断后的膜110夹着具有厚度的部件,能够防止膜110在比旋转刀21的切断位置靠前的位置裂开等。
[0138]
切割器单元20b的与切断用空间s的开口部相反侧的部分(突出支承部221c)在与旋转刀21相邻的部分形成有不存在部件的空间(膜流下空间),并且端部沿着与切割器单元20b和膜110的相对移动方向交叉的折线弯曲。
[0139]
由此,粘贴在工件100上的膜110在被旋转刀21切断之后,不会与部件接触。
[0140]
另外,被旋转刀21切断的切掉端的膜110随着切断的进行,一边避开弯曲的支承部件221的后端一边移动。
[0141]
因此,能够防止由于切断后的膜110与部件接触而产生灰尘或者使产品的品质降低。
[0142]
以上,对本发明的实施方式进行了说明,但本发明不限于前述的实施方式。另外,本实施方式中记载的效果只不过是列举了由本发明产生的最佳效果,本发明带来的效果不限定于本实施方式中记载的内容。
[0143]
标号说明
[0144]
1切断系统;10多关节机器人;10b输送装置;20切断装置;20a主体;20b切割器单元;20c连结部;21旋转刀;21a、30a旋转轴;21b、30b齿轮;22壳体;22a、222a贯通孔;221支承
部件;
[0145]
221a中空部;221b开放部;221c突出支承部;222背面侧板状体;
[0146]
223正面侧板状体;23引导部;23a槽部;30电动机;100工件;
[0147]
110膜;s切断用空间;p螺钉;d台。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。