一种agv小车循迹装置
技术领域
1.本实用新型涉及agv小车循迹领域,具体为一种agv小车循迹装置。
背景技术:
2.agv小车即自主导航小车是目前无人驾驶技术较为广泛的运用形式,它可以在无人引导的状态下自主完成预定路线的行驶。agv小车被大量运用于物流搬运、服务引导、娱乐玩具等众多领域,其中agv小车循迹装置是其实现功能的重要硬件基础。
3.市场上常见的agv小车循迹装置的成本都十分高昂且装置的集成化低下,为此,我们开发了一种成品低、集成度高、通用性强的agv小车循迹装置。
技术实现要素:
4.本实用新型的目的在于提供一种agv小车循迹装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下的技术方案:一种agv小车无线循迹装置,包括支架和传感器模块,所述支架中间有中央导轨,中央导轨上方设有支撑板,所述支撑板两侧有导轨一和导轨二,所述导轨一上连接有光电支架一,所述导轨二上连接有光电支架二,所述光电支架一中嵌入光电传感器一,所述光电支架二中嵌入光电传感器二,所述中央导轨下方连接有灰度传感器,所述灰度传感器下方有遮光罩。
6.作为本实用新型的进一步方案:所述光电支架一与所述光电支架二的圆孔中设有螺纹,分别与所述光电传感器一与所述光电传感器二螺纹连接。
7.作为本实用新型的进一步方案:所述支撑板开有连接孔,方便与小车连接,且支撑板开有槽,用于观察所述灰度传感器的状态。
8.作为本实用新型的进一步方案:所述灰度传感器开有连接孔,且遮光罩下方设置有螺纹孔,用于灰度传感器与遮光罩的螺栓连接。
9.作为本实用新型的进一步方案:所述传感器模块包括灰度传感器、光电传感器一、光电传感器二。
10.与现有技术相比,本实用新型的有益效果是:该agv小车循迹装置中,导轨一与导轨二与地面接触,使小车保持导轨方向运行,在小车行驶过程当中灰度传感器可以读取循迹线路的灰度值信号并计算循迹线路的曲率,使小车完成循迹导航功能,灰度传感器下方固定有遮光罩,以遮挡自然光线,防止自然光对灰度传感器产生干扰,在中央导轨的两侧固定有光电传感器一和光电传感器二,光电传感器一和光电传感器二可以识别车道式的双循迹线,当车辆向某一侧偏移时候,偏移一侧的光电传感器会读取到信号,以纠正小车偏移,使小车保持车道中心行驶,支架将灰度传感器、光电传感器一、光电传感器二集成于一个装置当中,提高了装置的集成度,在支架的支撑板上开有连接孔可以将该装置连接于各种形态的agv小车,提高了装置的通用性,且该agv小车循迹装置结构简单,可以降低成本。
附图说明
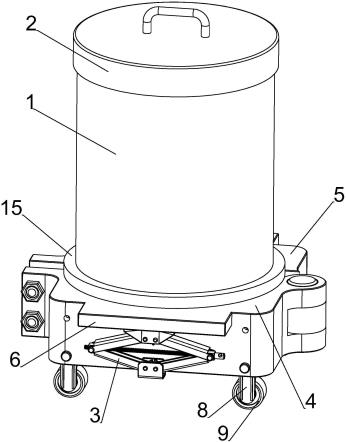
11.图1为本实用新型的整体结构示意图;
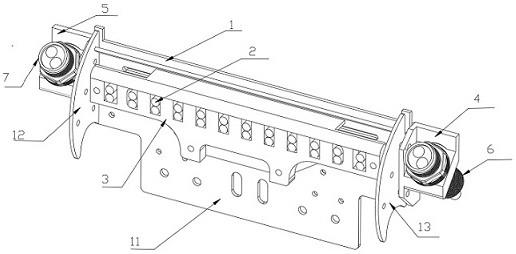
12.图2为本实用新型的侧视图;
13.图3为本实用新型的俯视图;
14.图4为本实用新型遮光罩的结构示意图。
15.图中:1、中央导轨;11、支撑板;12、导轨一;13、导轨二;2、灰度传感器;3、遮光罩;4、光电支架二;5、光电支架一;6、光电传感器二;7、光电传感器一。
具体实施方式
16.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.请参阅图1,本实用新型提供技术方案:一种agv小车无线循迹装置,包括支架和传感器模块,支架中间有中央导轨1,中央导轨1上方设有支撑板11,支撑板11两侧有导轨一12和导轨二13,导轨一12上连接有光电支架一5,导轨二13上连接有光电支架二4,光电支架一5中嵌入光电传感器一7,光电支架二4中嵌入光电传感器二6,中央导轨1下方连接有灰度传感器2,灰度传感器2下方有遮光罩3。
18.请参阅图2,本实用新型提供技术方案:光电支架一5与光电支架二4的圆孔中设有螺纹,光电支架一5通过螺纹与光电传感器一7连接,光电支架二4通过螺纹与光电传感器二6连接。
19.请参阅图3,本实用新型提供技术方案:支撑板11开有连接孔,方便与小车连接,且支撑板11开有槽,用于观察所述灰度传感器2的状态。
20.使用时,将agv小车循迹装置支撑板11上的连接孔与小车相连接,使得导轨一12与导轨二13与地面接触,使得小车可以沿导轨方向行驶,将灰度传感器2、光电传感器一7、光电传感器二6通电并于小车信号接收端相连接,在小车单线循迹过程中,灰度传感器2可以判读循迹线与地面的灰度差异,从而计算循迹线的曲率,将信号传输至小车的信号接收端,在小车进行双线车道循迹时,一旦车辆向车道某一侧偏移,一侧的光电传感器就可以检测到车道线,将车辆偏移方向传输至小车信号接收端,从而实现小车的无人驾驶与自主循迹。
21.本实施例中提及的超声波传感器型号为wl-send12-v4,光电传感器型号为e18-f10nk。
22.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种agv小车循迹装置,其特征在于,包括支架和传感器模块,所述支架中间有中央导轨(1),所述中央导轨(1)上方设有支撑板(11),所述支撑板(11)两侧有导轨一(12)和导轨二(13),所述导轨一(12)上连接有光电支架一(5),所述导轨二(13)上连接有光电支架二(4),所述光电支架一(5)中嵌入光电传感器一(7),所述光电支架二(4)中嵌入光电传感器二(6),所述中央导轨下方连接有灰度传感器(2),所述灰度传感器(2)下方有遮光罩(3)。2.根据权利要求1所述的一种agv小车循迹装置,其特征在于,所述光电支架一(5)与所述光电支架二(4)的圆孔中设有螺纹,分别与所述光电传感器一(7)与所述光电传感器二(6)螺纹连接。3.根据权利要求1所述的一种agv小车循迹装置,其特征在于,所述支撑板(11)开有连接孔,方便与小车连接,且支撑板(11)开有槽,用于观察所述灰度传感器(2)的状态。4.根据权利要求1所述的一种agv小车循迹装置,其特征在于,所述灰度传感器(2)开有连接孔,且遮光罩(3)下方设置有螺纹孔,用于灰度传感器(2)与遮光罩(3)的螺栓连接。5.根据权利要求1所述的一种agv小车循迹装置,其特征在于,所述传感器模块包括灰度传感器(2)、光电传感器一(7)、光电传感器二(6)。
技术总结
本实用新型公开了一种AGV小车循迹装置,涉及AGV小车循迹领域,包括支架和传感器模块,所述支架中间有中央导轨,中央导轨上方设有支撑板,所述光电支架一中嵌入光电传感器一,所述光电支架二中嵌入光电传感器二,所述中央导轨下方连接有灰度传感器,所述灰度传感器下方有遮光罩;该AGV小车循迹装置可以实现循迹线曲率信号采集,辅助小车完成无人驾驶状态下的自主循迹。自主循迹。自主循迹。
技术研发人员:郑恺 雷良育 石京天 吴晟浩 田磊 朱王晨
受保护的技术使用者:浙江农林大学
技术研发日:2022.11.03
技术公布日:2023/2/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。