1.本发明涉及车辆、车辆用控制装置以及车辆的控制方法。
背景技术:
2.已知检测车辆的故障的技术。例如,专利文献1公开了一种车辆,其检测多个故障项目来判断车辆的故障等级,并进行与判断出的故障等级相应的动作限制。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2016-107836号公报
技术实现要素:
6.发明所要解决的问题
7.当以故障诊断的结果为基准时,故障诊断是必须的。但是,在现有的系统中由于复杂而成为成本上升的重要因素,从而需要能够通过更简单的构成来判断是否需要功能限制的系统。
8.本发明的目的在于,提供通过更简易的系统来提高车辆的安全性的技术。
9.用于解决问题的手段
10.根据本发明,提供一种车辆,其特征在于,
11.所述车辆具备:
12.冲击度传感器,其检测车辆所受到的冲击度;以及
13.设定机构,其根据所述冲击度传感器检测出的冲击度,设定所述车辆的预定功能的限制。
14.另外,根据本发明,提供一种车辆用控制装置,其特征在于,
15.所述车辆用控制装置具备:
16.检测机构,其检测车辆所受到的冲击度;以及
17.设定机构,其根据所述检测机构检测出的冲击度,设定所述车辆的预定功能的限制。
18.另外,根据本发明,提供一种车辆的控制方法,其特征在于,
19.所述车辆的控制方法包括:
20.检测步骤,在该检测步骤中,检测车辆所受到的冲击度;以及
21.设定步骤,在该设定步骤中,根据在所述检测步骤中检测出的冲击度,设定所述车辆的预定功能的限制。
22.发明效果
23.根据本发明,能够提供通过更简易的系统来提高车辆的安全性的技术。
附图说明
24.图1是本发明的一个实施方式所涉及的跨乘型车辆的右侧的侧视图。
25.图2是图1的跨乘型车辆的主视图。
26.图3是控制装置的框图。
27.图4是表示控制单元的处理例的流程图。
28.图5a是表示控制单元的处理例的流程图,图5b是表示冲击度与功能限制之间的关系的映射。
29.图6是表示冲击度与功能限制之间的关系的另一映射。
30.图7是表示冲击度与功能限制之间的关系的又一映射。
31.附图标记说明
32.1:车辆;19f以及19r:刹车装置;30:控制装置;34:惯性传感器单元;35:油压控制装置。
具体实施方式
33.以下,参照附图对实施方式进行详细说明。此外,以下的实施方式不对专利技术方案所涉及的发明加以限定,另外,在实施方式中说明的特征的组合的全部并非是发明所必须的。在实施方式中说明的多个特征中的两个以上的特征可以被任意组合。另外,对相同或者同样的构成标注相同的附图标记,并省略重复的说明。
34.<跨乘型车辆的概要>
35.图1是本发明的一个实施方式所涉及的车辆1的右侧的侧视图,图2是车辆1的主视图。在各图中,箭头x、y、z表示相互正交的方向,x方向表示车辆的前后方向,y方向表示车辆的车宽方向(左右方向),z方向表示上下方向。车辆的左、右是在前进方向上观察的情况下的左、右。以下,有时将车辆的前后方向的前方或者后方仅称为前方或者后方。另外,有时将车辆的车宽方向(左右方向)的内侧或者外侧仅称为内侧或者外侧。
36.本实施方式的车辆1是跨乘型车辆,特别是适用于长距离的移动的旅行类的机动两轮车,但本发明除了能够适用于包括其他形式的机动两轮车在内的各种跨乘型车辆,还能够适用于机动四轮车,另外,除了能够适用于将内燃机作为驱动源的车辆,还能够适用于将马达作为驱动源的电动车辆。
37.车辆1在前轮fw与后轮rw之间具备动力单元2。动力单元2在本实施方式的情况下,包括水平对置六气缸的发动机21与变速器22。变速器22的驱动力经由未图示的传动轴而传递至后轮rw,使后轮rw旋转。
38.动力单元2支承于车身框架3。车身框架3包括在x方向上延伸设置的左右一对的主框架31。在主框架31的上方配置有燃料箱5、空气滤清器盒(未图示)。在燃料箱5的前方设置有具备对骑手显示各种信息的电子图像显示装置等的仪表面板mp。
39.在主框架31的前侧端部,设置有将由手柄8转动的方向操纵轴(未图示)支承为转动自如的头管32。在主框架31的后端部设置有左右一对的枢轴板33。枢轴板33的下端部与主框架31的前端部由左右一对的下臂(未图示)连接,动力单元2支承于主框架31与下臂。另外,在主框架31的后端部设置有向后方延伸的左右一对的座椅导轨(未图示),座椅导轨支承骑手就座的座椅4a、同乘者就座的座椅4b以及后备箱7b等。
40.在枢轴板33,将在前后方向上延伸的后摆臂(未图示)的前端部支承为摆动自如。后摆臂能够在上下方向上摆动,在其后端部支承有后轮rw。在后轮rw的下部侧方,在x方向上延伸设置有将发动机21的排气消音的排气消音器6。在后轮rw的上部侧方设置有左右的鞍囊7a。
41.在主框架31的前端部构成有支承前轮fw的前悬架机构9。前悬架机构9包括上连杆91、下连杆92、拨叉支承体93、缓冲单元94以及左右一对的前拨叉95。
42.上连杆91以及下连杆92分别在上下拉开间隔地配置于主框架31的前端部。上连杆91以及下连杆92的各后端部与主框架31的前端部摆动自如地连结。上连杆91以及下连杆92的各前端部与拨叉支承体93摆动自如地连结。上连杆91以及下连杆92分别在前后方向上延伸并且配置为实质性地平行。
43.缓冲单元94具有将减震器插通于螺旋弹簧的构造,其上端部摆动自如地支承于主框架31。缓冲单元94的下端部摆动自如地支承于下连杆92。
44.拨叉支承体93形成筒状并且后倾。在拨叉支承体93的上部前部,能够转动地连结有上连杆91的前端部。在拨叉支承体93的下部后部,将下连杆92的前端部连接为转动自如。
45.在拨叉支承体93,转向轴96绕其轴旋转自如地被支承。转向轴96具有插通拨叉支承体93的轴部(未图示)。在转向轴96的下端部设置有桥接器(未图示),在该桥接器支承有左右一对的前拨叉95。前轮fw旋转自如地支承于前拨叉95。转向轴96的上端部经由连杆97而与由手柄8转动的方向操纵轴(未图示)连结。通过手柄8的转向,转向轴96旋转并且前轮fw被转向。
46.车辆1具备制动前轮fw的刹车装置19f与制动后轮rw的刹车装置19r。刹车装置19f、19r构成为能够通过骑手对刹车杆8a或者刹车踏板8b的操作而工作。刹车装置19f、19r在本实施方式的情况下是盘式刹车器。
47.在车辆1的前部配置有向车辆1的前方照射光的头灯单元11。本实施方式的头灯单元11是左右对称地具备右侧的光照射部11r与左侧的光照射部11l的双目类型的头灯单元。但是,也能够采用单目类型、三目类型的头灯单元、或者左右非对称的双目类型的头灯单元。
48.车辆1的前部由前罩12覆盖,车辆1的前侧的侧部由左右一对的侧罩14覆盖。在前罩12的上方配置有挡风板13。挡风板13是在行驶中减轻骑手所受风压的风挡,例如,由透明的树脂构件形成。
49.在前罩12的侧方配置有左右一对的侧后视镜单元15。在侧后视镜单元15支承有骑手用于视觉辨认后方的侧后视镜(未图示)。
50.在本实施方式的情况下,前罩12由罩构件121~123构成。罩构件121在y方向上延伸并构成前罩12的主体,罩构件122构成罩构件121的上侧的部分。罩构件123配设为与罩构件121向下方向分离。
51.在罩构件121与罩构件123之间以及左右一对的侧罩14之间,形成使头灯单元11露出的开口,并且该开口的上缘由罩构件121划分,下缘由罩构件123划分,左右的侧缘由侧罩14划分。
52.在车辆1设置有获取车辆的前、后、侧方的至少任一环境状况的检测设备。作为这样的检测设备的一个例子,在本实施方式的情况下,在前罩12的背后配置有检测车辆1的前
方的状况的检测设备即拍摄单元16a以及雷达16b。雷达16b例如为毫米波雷达。拍摄单元16a包括ccd图像传感器、cmos图像传感器等拍摄元件、以及透镜等光学系统,拍摄车辆1的前方的图像。拍摄单元16a配置于构成前罩12的上部的罩构件122的背后。在罩构件122形成有将其贯通的开口122a,拍摄单元16a穿过开口122a而拍摄车辆1的前方的图像。
53.雷达16b配置于罩构件121的背后。通过罩构件121的存在,能够在车辆1的主视观察下使检测单元16的存在变得不显眼,能够避免车辆1的外观恶化。罩构件121由树脂等电磁波能够透过的材料构成。
54.<控制装置>
55.图3是车辆1的控制装置30的框图,仅图示在与后述说明的关系中必要的构成。车辆1具备控制单元(ecu)31。控制单元31包括以cpu为代表的处理器、半导体存储器等存储设备、以及与外部设备的输入输出接口或者通信接口等。在存储设备中储存有处理器执行的程序、处理器处理所使用的数据等。控制单元31可以具备多组与车辆1的各功能对应的处理器、存储设备以及接口等。
56.控制单元31获取拍摄单元16a以及雷达16b的检测结果,平时识别车辆1的周边的物标。另外,控制单元31能够获取前轮fw1的旋转量传感器32、后轮rw2的旋转量传感器33的各检测结果。能够根据这些旋转量传感器32、33的检测结果来运算车辆1的车速,在本实施方式中,旋转量传感器32或者33作为检测车辆1的车速的传感器而发挥功能。
57.惯性传感器单元(imu)34是检测车辆1的举动的传感器单元,例如配置于车辆1的重心附近。imu34包括例如检测车辆1的前后方向、左右方向、上下方向的加速度的各加速度传感器、以及检测车辆1的滚转方向、俯仰方向、偏航方向的角速度的各角速度传感器。加速度传感器也用作检测车辆1所受到的冲击度的传感器。另外,加速度传感器或者角速度传感器也用作检测车辆1是否已倾倒的传感器。
58.控制单元31能够进行仪表面板mp的显示控制、动力单元2以及刹车装置19的各致动器的驱动控制。控制单元31能够在仪表面板mp进行对骑手的各种警报显示。刹车装置19经由油压控制装置35而被驱动控制。油压控制装置35具备电动泵等油压产生装置35a、切换油压的传递路线的控制阀等。
59.刹车装置19f包括固定于前轮fw的刹车盘19a与刹车钳19b,通过对刹车钳19b供给油压,刹车钳19b夹持刹车盘19a而产生制动力。同样地,刹车装置19r包括固定于后轮rw的刹车盘19c与刹车钳19d,通过对刹车钳19d供给油压,刹车钳19d夹持刹车盘19c而产生制动力。
60.主缸20f产生与对刹车杆8a的操作量相应的油压。主缸20r产生与对刹车踏板8b的操作量相应的油压。油压控制装置35将与主缸20f或者20r的油压相应的油压供给至刹车装置19,使刹车装置19产生制动力。另外,油压控制装置35即使没有对刹车杆8a、刹车踏板8b的操作,也能够将在油压产生装置35a中产生的油压供给至刹车装置19,使刹车装置19产生制动力。
61.<自动刹车功能>
62.车辆1具有自动刹车功能。自动刹车功能是在车辆1的周围的障碍物与车辆1的可能碰撞的情况下,为了避免碰撞而自动地使刹车装置19工作的功能。图4是表示控制单元31的控制例的流程图,特别是表示与自动刹车功能的工作控制有关的控制例的流程图。图4的
控制例由控制单元31周期性地执行。
63.在s1中,获取拍摄单元16a以及雷达16b的检测结果。在s2中,基于s1的检测结果而判断车辆1与障碍物是否可能碰撞。例如,检测出在预定时间后与车辆1位于相同位置的障碍物的情况下,判断为可能碰撞。在判断为可能碰撞的情况下进入到s3,在判断为不可能碰撞的情况下结束处理。
64.在s3中,获取自动刹车功能的功能限制的设定。功能限制的设定例如保存于控制单元31的存储设备。对功能限制的设定的细节进行后述。在s4中,在s3中获取到的功能限制的设定中,判断是否设定了功能停止。在设定了功能停止的情况下结束处理,在未设定功能停止的情况下进入到s5。在s5中,无关骑手的制动操作,使刹车装置19工作而使车辆1减速。由此,能够避免与障碍物的碰撞。另外,在s5中,在仪表面板mp显示自动刹车为工作中的情况。通过该显示,骑手能够识别自动刹车已工作。
65.<功能限制的设定>
66.在车辆1由于倾倒等而受到强烈冲击的情况下,车辆1的传感器、致动器可能产生性能降低。在产生了这样的性能降低的状况下,如自动刹车功能那样,车辆1自动地工作的功能可能无法充分发挥预定功能。
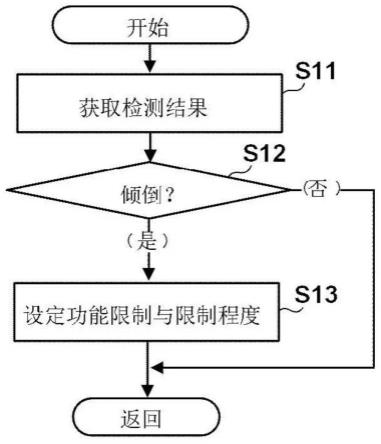
67.对此,在本实施方式中,根据车辆1所受到的冲击度而对其后的自动刹车功能的工作设定限制。能够无需故障诊断而通过更简易的系统来提高车辆的安全性。图5a是表示控制单元31的处理例的流程图,特别是表示功能限制的设定处理的例子的流程图。图5a的控制例由控制单元31周期性地执行。
68.在s11中,获取imu34、旋转量传感器32以及旋转量传感器33的检测结果。在s12中,基于在s11中获取到的检测结果而判断车辆1是否已倾倒。是否已倾倒,例如能够根据由imu34的加速度传感器或者角速度传感器检测出的滚转方向的加速度或者角速度来判断。此时,也能够考虑旋转量传感器32以及旋转量传感器33的检测结果的变化(急剧的速度变化)。在判断为已倾倒的情况下,为了进行功能限制而进入到s13,在判断为未倾倒的情况下结束处理。
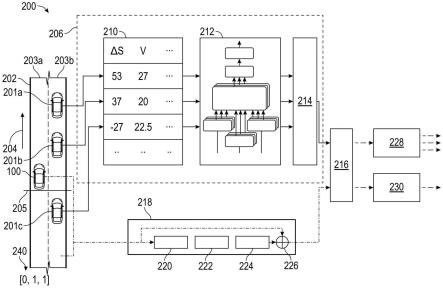
69.在s13中,设定限制程度与功能限制。限制程度设为与车辆1的倾倒时的冲击度相应的程度。倾倒时的冲击度设为imu34检测出的最大的加速度(g),例如能够设为倾倒检测前后的一定时间内的最大加速度(g)。图5b示出了表示冲击度与限制程度的关系的例子。
70.在冲击度(g)小于1g的情况下,50%作为限制程度而被设定。该限制程度例如为自动刹车工作时的减速度。当50%作为限制程度而被设定时,在图4的处理中,在s3中获取该设定,在s5的自动刹车的工作时,刹车相对于通常时的减速度以50%的减速度工作,制动力被减弱。减速度的调整,例如能够通过在自动刹车的工作时供给至刹车装置19的油压的大小、供给时间来进行。
71.在图5b的例子中,限制程度根据冲击度的增加而限制变强。在冲击度(g)为20g以上且小于30g的情况下,20%作为限制程度而被设定。在图4的s5的自动刹车的工作时,制动器相对于通常时的减速度以20%的减速度工作,制动力被进一步减弱。另外,在图5b的例子中,在冲击度(g)为50g以上的情况下,设定自动刹车功能的功能停止。当设定功能停止时,在图4的s4中自动刹车将不再工作。
72.在图5b的例子中,限制程度以冲击度的阈值th1为界限,根据冲击度的增加而限制
变强。在图示的例子中,将10g设为阈值th1,在冲击度为阈值th1以下的情况下,无关乎冲击度而将限制程度恒定为50%。在冲击度超过了阈值th1的情况下,随着冲击度变大,限制程度也变大。另外,以比阈值th1大的阈值th2为界限,设定是否功能停止。在图示的例子中,将50g设为阈值th2,当冲击度超过阈值th2时,设定功能停止。
73.像这样,在s13中设定功能限制与限制程度。设定内容被储存于控制单元31的存储设备。另外,在s13中设定了功能限制的情况下,在仪表面板mp显示设定了自动刹车的功能限制的情况。通过该显示,骑手能够识别自动刹车是否工作、以及即使工作也比通常弱地工作的情况。
74.<冲击度与限制程度之间的关系的另一例>
75.在图5b的例子中,仅通过冲击度而设定了限制程度,但很多情况是,性能降低的程度因倾倒时的车辆1的车速而不同,有时当以更快的速度倾倒时,车辆1所受到的冲击度即使相同,但性能降低会很大。因此,可以通过倾倒时的车辆1的车速与冲击度而设定限制程度。图6表示其一个例子。此外,在图5a的处理例中,在s11中,能够获取旋转量传感器32以及旋转量传感器33的检测结果来运算倾倒时的车辆1的车速。
76.在图6的例子中作为整体性的趋势,如果是相同的车速,则随着冲击度变大而增大限制程度,另外,如果是相同的冲击度,则随着车速变快而增大限制程度。
77.冲击度的阈值th1以及th2根据车速而被设为不同的值。能够更准确地设定冲击度的阈值th1以及th2。在车速为10km/h以下的情况下,阈值th1为10g。在10g以下的冲击度的情况下,无关乎冲击度而将限制程度恒定为50%。在受到超过了10g的冲击度的情况下,随着冲击度变大,限制程度也变大。在车速超过10km且为60km以下的情况下,阈值th1为1g。在1g以下的冲击度的情况下,无关乎冲击度而将限制程度恒定为50%。在受到超过1g的冲击度的情况下,随着冲击度变大,限制程度也变大。在车速超过60km/h的情况下,阈值th1没有特别设定,但也可以设定。
78.在车速为10km/h以下的情况下,阈值th2为50g,在车速超过10km/h且为20km/h以下的情况下,阈值th2为30g。同样地,在车速超过20km/h且为40km/h以下的情况下,阈值th2为20g,在车速超过40km/h且为60km/h以下的情况下,阈值th2为15g。同样地,在车速超过60km/h且为80km/h以下的情况下,阈值th2为10g,在车速超过80km/h的情况下,阈值th2为1g。在车速为80以下的情况下,随着冲击度变大,限制程度也变大。
79.图7示出了又一例。也在图7的例子中作为整体性的趋势,如果是相同的车速,则随着冲击度变大而增大限制程度,另外,如果是相同的冲击度,则随着车速变快而增大限制程度。在图7的例子中,设定车速的阈值th3以及阈值th4,并以这些阈值为基准,将对车速的限制程度设为不同的趋势。车速的阈值th3以及阈值th4可以无关乎冲击度而设为相同的值,但在本实施方式中也可以设为不同的值。
80.在图7的例子中,以车速的阈值th3为界限,限制根据车速的增加而变强。在冲击度为1g以下的情况下,阈值th3为60km/h。在车速为60km/h以下的情况下,无关车速而将限制程度恒定为50%。在车速超过60km/h的情况下,随着车速变快,限制程度也变大。在冲击度超过1g且为15g以下的情况下,阈值th3为40km/h。在车速为40km/h以下的情况下,无关车速而将限制程度恒定为50%(1<g≦10)或者40%(10≦g≦15)。在车速超过40km/h的情况下,随着车速变快,限制程度也变大。同样地,在冲击度超过15g且为30g以下的情况下,阈值th3
为20km/h,在冲击度超过30g且为50g以下的情况下,阈值th3为10km/h。在冲击度超过50g的情况下,阈值th3没有特别设定,但也可以设定。
81.以比阈值th3快的阈值th4为界限,设定是否功能停止。在图示的例子中,在冲击度为15g以下的情况下,不设定功能停止。在冲击度超过15g且为20g以下的情况下,阈值th4为80km/h。在冲击度超过20g且为30g以下的情况下,阈值th4为60km/h。在冲击度超过30g且为50g以下的情况下,阈值th4为40km/h。在冲击度超过50g的情况下,阈值th4为20km/h。冲击度越大,则阈值th4被设定为越低的车速。
82.<其他的实施方式>
83.在上述实施方式中,作为受限制的功能例示了自动刹车功能,但不限于此。能够将不依靠骑手的操作而被自动地执行的各种功能设为限制对象。例如,abs(防抱死刹车系统)功能、对碰撞预知时和障碍物检测时的骑手的警报功能、巡航功能、牵引控制功能以及转向辅助功能等能够成为限制的对象。
84.接下来,在上述实施方式中,作为限制程度的设定的方法,例示出使用了图5b、图6以及图7例示出的映射(表格)的方法,但也可以是根据运算式来运算限制程度的方法。
85.<实施方式的总结>
86.上述实施方式至少公开了以下的车辆、车辆用控制装置以及车辆的控制方法。
87.1.上述实施方式的车辆(1)具备:
88.冲击度传感器(34),其检测车辆所受到的冲击度;以及
89.设定机构(31、s13),其根据所述冲击度传感器检测出的冲击度,设定所述车辆的预定功能的限制。
90.根据该实施方式,能够提供通过更简易的系统来提高车辆的安全性的技术。
91.2.在上述实施方式中,
92.在所述冲击度传感器检测出的冲击度超过了第一阈值(th1)的情况下,随着所述冲击度传感器检测出的冲击度变大,所述设定机构(31、s13)增大所述预定功能的限制程度。
93.根据该实施方式,当冲击度超过第一阈值时,通过增大限制程度,能够采取与一定以上的冲击施加至车辆而导致的性能降低的程度相应的功能限制而提高安全性。
94.3.在上述实施方式中,
95.随着所述冲击度传感器检测出的冲击度变大,所述设定机构(31、s13)增大所述预定功能的限制程度,
96.在所述冲击度传感器检测出的冲击度超过了第二阈值(th2)的情况下,所述设定机构(31、s13)停止所述预定功能。
97.根据该实施方式,当冲击度超过第二阈值时,通过停止所述预定功能的工作,能够对非常强烈的冲击施加至车辆而导致的性能降低进行功能停止而提高安全性。
98.4.上述实施方式的车辆(1)具备车速传感器(32、33),该车速传感器(32、33)检测所述车辆的速度,
99.所述设定机构(31、s13)根据所述车速传感器检测出的车速与所述冲击度传感器检测出的冲击度,设定所述预定功能的限制。
100.根据该实施方式,也考虑车速来设定功能的限制,由此能够无需故障诊断而对性
能降低适当地采取功能限制。
101.5.在上述实施方式中,
102.在所述车速传感器检测出的车速超过了第三阈值(th3)的情况下,随着所述冲击度传感器检测出的冲击度变大,所述设定机构(31、s13)增大所述预定功能的限制程度。
103.根据该实施方式,在车速超过了第三阈值的状态下车辆受到冲击的情况下,通过增大限制程度,能够采取与性能降低的程度相应的功能限制而提高安全性。
104.6.在上述实施方式中,
105.随着所述车速变快,所述设定机构(31、s13)增大所述预定功能的限制程度,
106.在所述车速传感器检测出的车速超过了第四阈值(th4)的情况下,所述设定机构(31、s13)停止所述预定功能。
107.根据该实施方式,在车速超过了第四阈值的状态下车辆受到冲击的情况下,能够进行功能停止而提高安全性。
108.7.在上述实施方式中,
109.所述阈值(th1、th2)根据所述车速传感器检测出的车速而不同(图6)。
110.根据该实施方式,能够适当地设定阈值。
111.8.在上述实施方式中,
112.所述阈值(th3、th4)根据所述冲击度传感器检测出的冲击度而不同(图7)。
113.根据该实施方式,能够适当地设定阈值。
114.9.在上述实施方式中,
115.在所述冲击度传感器检测出的冲击度为所述第一阈值(th1)以下的情况下,所述设定机构(31、s13)无关所述冲击度而使所述预定功能的限制程度恒定。
116.根据该实施方式,在预计为性能降低很低的情况下,能够采取最低限度的功能限制而提高安全性,并且能够允许该功能的工作而实现该功能的利用。
117.10.在上述实施方式中,
118.所述预定功能是指自动刹车功能。
119.根据该实施方式,通过将对骑手(驾驶者)的乘车姿态影响很大的自动刹车功能作为限制的对象,能够限制未预定大小的该工作而提高安全性。
120.11.在上述实施方式中,
121.所述车辆(1)是跨乘型车辆。
122.根据该实施方式,在骑手由于各功能的性能降低而容易受乘车姿态等影响的跨乘型车辆中,能够提高安全性、舒适性。
123.12.在上述实施方式中,
124.所述设定机构(31、s13)根据所述车辆的倾倒时所述冲击度传感器检测出的冲击度,设定所述预定功能的限制(s12、s13)。
125.根据该实施方式,在容易产生性能降低的倾倒时采取功能限制,由此能够避免不必要地采取功能限制的情况。
126.13.上述实施方式的车辆用控制装置(30)具备:
127.检测机构(34),其检测车辆所受到的冲击度;以及
128.设定机构(31、s13),其根据所述检测机构检测出的冲击度,设定所述车辆的预定
功能的限制。
129.根据该实施方式,能够提供通过更简易的系统来提高车辆的安全性的技术。
130.14.上述实施方式的车辆的控制方法包括:
131.检测步骤(s11),在该检测步骤(s11)中,检测车辆(1)所受到的冲击度;以及
132.设定步骤(s13),在该设定步骤(s13)中,根据在所述检测步骤中检测出的冲击度,设定所述车辆的预定功能的限制。
133.根据该实施方式,能够提供通过更简易的系统来提高车辆的安全性的技术。
134.以上,对发明的实施方式进行了说明,但发明不限于上述的实施方式,在发明的主旨的范围内,能够进行各种变形、变更。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。