1.本发明涉及无人清扫车领域,特别涉及一种用于无人清扫车的垃圾箱自动更换装置。
背景技术:
2.随着科技的不断发展进步,无人清扫车逐渐开始进入人们视野。与人工清扫相比,通过无人清扫车对路面进行清扫能够极大地节省人力,且清扫效率较高,清扫效果更好。通常,无人清扫车清扫时,会将垃圾收入车内的垃圾箱内,待垃圾收集箱装满后,无人清扫车会回到垃圾回收点,而后通过人工将垃圾箱内的垃圾倒出,之后再由人工将空垃圾桶放入到无人清扫车内。通过人工将垃圾箱内的垃圾倒出从而更换垃圾桶的方法较为浪费人力,故而需要一种用于无人清扫车的垃圾箱自动更换装置来解决此问题。
技术实现要素:
3.本发明的主要目的在于提供一种用于无人清扫车的垃圾箱自动更换装置,可以有效解决背景技术中的问题。
4.为实现上述目的,本发明采取的技术方案为:
5.一种用于无人清扫车的垃圾箱自动更换装置,包括无人清扫车主体,所述无人清扫车主体后端对称安装有两个升降结构,两个所述升降结构上均安装有一个连接结构,两个所述连接结构上均安装有一个驱动结构,所述驱动结构包含一号电机和驱动杆,所述驱动杆安装在一号电机的输出轴上,所述连接结构和驱动结构上安装有输送结构,所述输送结构包含基板结构、螺纹杆、限位导杆、安装块、驱动辊、输送带以及二号电机,所述螺纹杆安装在基板结构的外端,所述限位导杆有两个且对称安装在基板结构的外端,所述安装块有四个且两两上下对称安装在基板结构的内端,所述驱动辊有两个且转动安装在四个安装块上,所述输送带安装在两个驱动辊上,所述二号电机有两个且分别安装在两个下侧的安装块的下端。
6.优选的,所述无人清扫车主体上安装有识别摄像头,所述无人清扫车主体的后端设置有垃圾货箱,所述无人清扫车主体的下方安装有清扫刷结构。
7.优选的,两个所述升降结构对称安装在无人清扫车主体后端设置的垃圾货箱的左右两侧,所述升降结构包含液压缸和液压杆,所述液压缸通过螺钉固定安装在无人清扫车主体的后端,所述液压杆安装在液压缸上。
8.优选的,两个所述连接结构分别位于无人清扫车主体后端设置的垃圾货箱的左右两侧,所述连接结构包含连接基板、连接板以及安装基板,所述连接基板通过螺钉固定安装在升降结构上的液压杆的下端,所述连接板安装在连接基板的后端,所述安装基板安装在连接板的后端,所述连接基板、连接板以及安装基板为一体成型结构,所述安装基板上对称开设有两个限位通孔,两个所述限位通孔均将安装基板的内外两端贯通,所述安装基板上开设有一个安装通孔,所述安装通孔位于两个限位通孔之间,所述安装通孔将安装基板的
内外两端贯通。
9.优选的,所述驱动结构上的一号电机通过螺钉固定安装在连接结构上的安装基板的外端,所述驱动杆通过螺钉固定安装在一号电机的驱动轴上,所述驱动杆向内穿过安装基板上开设的安装通孔,所述驱动杆的内端开设有螺纹收纳孔,所述驱动杆在安装通孔内可进行转动。
10.优选的,所述输送结构上的基板结构和安装块为一体成型形结构,所述螺纹杆位于两个限位导杆之间,两个所述限位导杆均通过焊接的方式固定安装在基板结构的外端,所述螺纹杆通过焊接的方式固定安装在基板结构的外端,
11.优选的,所述输送结构上的基板结构位于驱动杆的内侧,所述螺纹杆安装在驱动杆内端开设的螺纹收纳孔内,两个所述限位导杆分别插入在安装基板上对称开设的两个限位通孔内,两个所述限位导杆在两个限位通孔内均可进行内外移动,
12.优选的,所述输送结构上的两个驱动辊位于四个安装块之间,所述输送带转动安装在两个驱动辊上,两个所述二号电机均通过螺钉固定安装在下侧的两个安装块的下端,两个所述二号电机的输出轴分别与两个驱动辊通过螺钉固定安装在一起。
13.与现有技术相比,本发明具有如下有益效果:
14.通过设置驱动结构和输送结构,使其配合升降结构,当无人清扫车主体内的垃圾箱满后,可使用驱动结构和输送结构将垃圾桶从垃圾货箱内取出,而后使用升降结构将垃圾桶放下,之后无人清扫车主体进行移动位置,从而使得空垃圾桶处于垃圾货箱的后方,而后在使用驱动结构和输送结构将空垃圾桶放入到垃圾货箱内,此时即完成了垃圾箱的自动更换,最终减少了人力的付出;通过设置驱动结构,使其配合输送结构,可以便于垃圾桶的夹持;通过设置输送结构,可以便于垃圾桶的前后移动。
附图说明
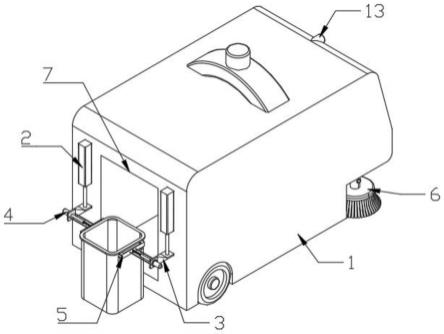
15.图1为本发明的整体结构示意图;
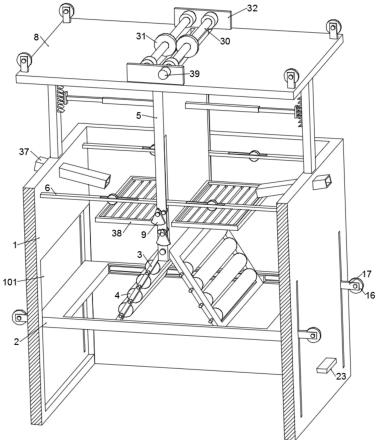
16.图2为本发明的升降结构、连接结构、驱动结构以及输送结构的结构示意图;
17.图3为本发明的升降结构、连接结构以及驱动结构的结构示意图;
18.图4为本发明的图4的a处的放大图;
19.图5为本发明的输送结构的结构示意图。
20.图中:1、无人清扫车主体;2、升降结构;3、连接结构;4、驱动结构;5、输送结构;6、清扫刷结构;7、垃圾货箱;8、液压缸;9、液压杆;10、连接基板;11、连接板;12、安装基板;13、识别摄像头;14、限位通孔;15、安装通孔;16、一号电机;17、驱动杆;18、螺纹收纳孔;19、基板结构;20、螺纹杆;21、限位导杆;22、安装块;23、驱动辊;24、输送带;25、二号电机。
具体实施方式
21.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
22.请参阅图1、图2、图3、图4、图5所示,一种用于无人清扫车的垃圾箱自动更换装置,包括无人清扫车主体1,无人清扫车主体1上安装有识别摄像头13,无人清扫车主体1的后端设置有垃圾货箱7,无人清扫车主体1的下方安装有清扫刷结构6,无人清扫车主体1后端对
称安装有两个升降结构2,两个升降结构2对称安装在无人清扫车主体1后端设置的垃圾货箱7的左右两侧,升降结构2包含液压缸8和液压杆9,液压缸8通过螺钉固定安装在无人清扫车主体1的后端,液压杆9安装在液压缸8上,两个升降结构2上均安装有一个连接结构3,两个连接结构3分别位于无人清扫车主体1后端设置的垃圾货箱7的左右两侧,连接结构3包含连接基板10、连接板11以及安装基板12,连接基板10通过螺钉固定安装在升降结构2上的液压杆9的下端,连接板11安装在连接基板10的后端,安装基板12安装在连接板11的后端,连接基板10、连接板11以及安装基板12为一体成型结构,安装基板12上对称开设有两个限位通孔14,两个限位通孔14均将安装基板12的内外两端贯通,安装基板12上开设有一个安装通孔15,安装通孔15位于两个限位通孔14之间,安装通孔15将安装基板12的内外两端贯通,在无人清扫车主体1使用时,无人清扫车主体1上的识别摄像头13可以对路面进行识别,当路面上存在垃圾时,无人清扫车主体1会启动清扫刷结构6,从而清扫刷结构6会将垃圾进行清扫收集,而后被清扫收集的垃圾会落入到处于垃圾货箱7内的垃圾箱内。
23.请参阅图1、图2、图3、图4、图5所示,两个连接结构3上均安装有一个驱动结构4,驱动结构4包含一号电机16和驱动杆17,驱动杆17安装在一号电机16的输出轴上,驱动结构4上的一号电机16通过螺钉固定安装在连接结构3上的安装基板12的外端,驱动杆17通过螺钉固定安装在一号电机16的驱动轴上,驱动杆17向内穿过安装基板12上开设的安装通孔15,驱动杆17的内端开设有螺纹收纳孔18,驱动杆17在安装通孔15内可进行转动,连接结构3和驱动结构4上安装有输送结构5,输送结构5包含基板结构19、螺纹杆20、限位导杆21、安装块22、驱动辊23、输送带24以及二号电机25,螺纹杆20安装在基板结构19的外端,限位导杆21有两个且对称安装在基板结构19的外端,安装块22有四个且两两上下对称安装在基板结构19的内端,驱动辊23有两个且转动安装在四个安装块22上,输送带24安装在两个驱动辊23上,二号电机25有两个且分别安装在两个下侧的安装块22的下端,输送结构5上的基板结构19和安装块22为一体成型形结构,螺纹杆20位于两个限位导杆21之间,两个限位导杆21均通过焊接的方式固定安装在基板结构19的外端,螺纹杆20通过焊接的方式固定安装在基板结构19的外端,输送结构5上的基板结构19位于驱动杆17的内侧,螺纹杆20安装在驱动杆17内端开设的螺纹收纳孔18内,两个限位导杆21分别插入在安装基板12上对称开设的两个限位通孔14内,两个限位导杆21在两个限位通孔14内均可进行内外移动,输送结构5上的两个驱动辊23位于四个安装块22之间,输送带24转动安装在两个驱动辊23上,两个二号电机25均通过螺钉固定安装在下侧的两个安装块22的下端,两个二号电机25的输出轴分别与两个驱动辊23通过螺钉固定安装在一起,通过设置驱动结构4和输送结构5,使其配合升降结构2,当无人清扫车主体1内的垃圾箱满后,可使用驱动结构4和输送结构5将垃圾桶从垃圾货箱7内取出,而后使用升降结构2将垃圾桶放下,之后无人清扫车主体1进行移动位置,从而使得空垃圾桶处于垃圾货箱7的后方,而后在使用驱动结构4和输送结构5将空垃圾桶放入到垃圾货箱7内,此时即完成了垃圾箱的自动更换,最终减少了人力的付出,通过设置驱动结构4,使其配合输送结构5,可以便于垃圾桶的夹持,通过设置输送结构5,可以便于垃圾桶的前后移动。
24.需要说明的是,本发明为一种用于无人清扫车的垃圾箱自动更换装置,在使用时,无人清扫车主体1上的识别摄像头13可以对路面进行识别,当路面上存在垃圾时,无人清扫车主体1会启动清扫刷结构6,从而清扫刷结构6会将垃圾进行清扫收集,而后被清扫收集的
垃圾会落入到处于垃圾货箱7内的垃圾箱内;当垃圾箱盛满后,可对其进行更换,而垃圾箱进行自动更换的方法为,首先无人清扫车主体1驶回垃圾回收站,而后使得无人清扫车主体1停到指定位置,接着使用驱动结构4和输送结构5将垃圾箱从垃圾货箱7内取出,此时先启动驱动结构4上的一号电机16,而后驱动杆17会被一号电机16驱动,从而产生顺时针转动,随着驱动杆17的顺时针转动,输送结构5上的螺纹杆20会向内移动,进而输送结构5整体会向内移动,最终使得两个输送结构5将垃圾货箱7内的垃圾桶夹紧即可,而后关闭一号电机16,接着再驱动输送结构5上的二号电机25,此时二号电机25会驱动输送带24进行转动,而随着输送带24的转动,被输送结构5夹紧的垃圾桶会被输送带24向后输送,当垃圾桶完全脱离垃圾货箱7后,再停止二号电机25,最后启动升降结构2上的液压缸8,从而使得液压杆9向下移动,随着液压杆9的下移,其会带动连接结构3驱动结构4以及输送结构5向下移动,最终使得被输送结构5夹持的垃圾箱与地面接触即可,随后无人清扫车主体1进行移动位置,从而使得空垃圾桶处于垃圾货箱7的后方,再使用驱动结构4和输送结构5将空垃圾桶放入到垃圾货箱7内,此时即完成了垃圾箱的自动更换,最终减少了人力的付出。
25.以上所述仅为本发明的优选实施例,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。