1.本发明属于主动声呐探测弱目标领域,涉及弱运动目标检测方法。
背景技术:
2.主动声呐在复杂的海洋环境中探测噪声背景下的弱运动目标时,由于远距离探测时目标回波信噪比低,导致了高虚警率。为了提高检测能力,目前常用能量积累类方法来提高目标信噪比。能量积累类方法可分为脉冲内能量积累和脉冲间能量积累,其中脉冲内能量积累方法通常对宽带信号进行匹配滤波,但当匹配滤波后目标信号输出信噪比仍然较低时,可以通过脉冲间能量积累来提高目标信噪比。现有的脉冲间能量积累方法主要分为非相干脉冲积累和相干脉冲积累。与非相干脉冲积累相比,相干脉冲积累利用了目标的相位和幅值信息,对目标回波同相相加,积累后信噪比增益更高,更有利于主动声呐在低信噪比环境下检测弱目标。
3.在主动声呐利用相干脉冲积累探测水下弱运动目标时,主要面临以下难点:一,由于水下目标有一定速度(考虑匀速情况),在相干积累时间内目标回波从一个距离单元运动到另一个距离单元,即发生线性距离徙动,导致传统相干脉冲积累方法增益下降。二,由于主动声呐经常使用宽带信号探测目标,且脉冲重复周期较长,导致探测到的目标速度经常是模糊的,并且带宽内的模糊数不恒定。
4.在以往的研究和文献中,解决距离徙动的方法大多为雷达中应用广泛的keystone变换方法。keystone变换可以解除目标信号频率与慢时间的线性耦合,在低信噪比下很好的校正线性距离徙动
[5-7]
。当目标速度模糊时,雷达中通过遍历模糊数,找到使相关积累峰值最大的模糊数对keystone变换进行补偿
[8-9]
。但在主动声呐中,主要存在的难点是:和雷达发射信号相比,主动声呐发射信号的中心频率较低,且带宽基本与中心频率为一个量级,导致运动目标的速度模糊数在带宽内不是恒定的,通过补偿固定模糊数的传统方法相干积累增益下降。
[0005]
经过文献检索发现,有下列文献对多脉冲积累检测弱运动目标问题进行了研究:
[0006]
[1]li y c,zhang l,liu b c,et al.stepped-frequency inverse synthetic aperture radar imaging based on adjacent pulse correlation integration and coherent processing[j].iet signal processing,2011,5(7):632-642.
[0007]
[2]苏军海,张龙,邢孟道.宽带雷达机动多目标检测[j].电子与信息学报,2010.
[0008]
[3]xu j,yu j,peng y n,et al.radon-fourier transform for radar target detection,i:generalized doppler filter bank[j].ieee transactions on aerospace and electronic systems,2011,47(2):1186-1202.
[0009]
[4]陈潜,付朝伟,刘俊豪.基于随机脉冲重复间隔radon-fourier变换的相参积累[j].电子与信息学报,2015,37(5):1085
–
1090.
[0010]
[5]李春林,范建华.基于keystone变换的长时间相参积累的仿真与研究[j].电子科技,2013,26(6):5.
[0011]
[6]张顺生.基于keystone变换的微弱目标检测[j].电子学报,2005,33(9):1675
–
1678.
[0012]
[7]罗丁利,向聪.一种基于keystone变换的运动目标相参积累方法[j].现代雷达,2017,39(10):49-54 66.
[0013]
[8]li y,zeng t,long t,et al.range migration compensation and doppler ambiguity resolution by keystone transform[c]//2006cie international conference on radar.ieee,2006:1-4.
[0014]
[9]侯庆禹,刘宏伟,保铮.基于keystone变换的宽带目标识别雷达杂波抑制[j].系统工程与电子技术,2009,31(01):49-53.
[0015]
[10]zhang y.multiplication-based pulse integration for detecting underwater target in impulsive noise environment[j].ieee access,2016,4:6894-6900.
[0016]
文献检索结果表明现有文献中关于多脉冲相干积累检测弱运动目标的方法大多数为雷达领域,主动声呐中涉及较少。雷达中多脉冲相干积累检测弱运动目标的方法大致可分为三种:
[0017]
1、基于相邻相关法的相干积累
[1-2]
。通过计算待检测距离单元与参考距离单元之间的相关函数并搜索最大相关值,得到目标速度估计值后对回波包络进行补偿,实现相干积累。由于该方法核心为计算相关函数最大值,因此该方法要求较高的信噪比条件,当背景信噪比较低时该方法的回波补偿能力下降,难以有效对回波进行积累。
[0018]
2、基于radon傅里叶变换的相干积累
[3-4]
。通过对接收回波联合搜索距离和速度,构建多普勒匹配滤波器,实现目标的相干积累。但该方法需要对距离-速度二维空间内所有的点进行搜索积分,运算量大。同时由于离散脉冲采样等原因,该方法的积累结果会产生盲速旁瓣,导致严重的虚警。
[0019]
3、基于keystone变换的相干积累
[5-7]
。通过对接收回波进行keystone变换实现对慢时间维的伸缩,解除快时间频率与慢时间的耦合,可在低信噪比下校正线性距离徙动,有效相干积累回波。当目标速度模糊时,文献
[8]-[9]
通过搜索模糊数,对keystone变换补偿使相干积累峰值最大的模糊数,但适用于雷达中发射信号带宽较窄的情况。文献
[10]
将keystone变换应用于水声中的目标距离徙动校正和相干积累,但没有考虑速度模糊的情况。
技术实现要素:
[0020]
本发明的目的是为了解决主动声呐在低信噪比下探测弱运动目标时,由于运动目标速度模糊的模糊数在带宽内不恒定导致相干积累增益下降的问题,提出了基于宽带keystone变换的弱运动目标检测方法。
[0021]
基于宽带keystone变换的弱运动目标检测方法,具体过程为:
[0022]
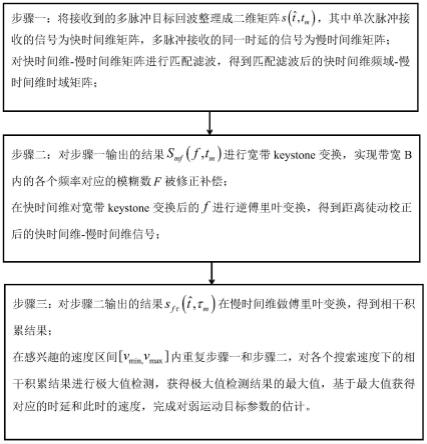
步骤一:将接收到的多脉冲目标回波整理成二维矩阵其中单次脉冲接收的信号为快时间维矩阵,多脉冲接收的同一时延的信号为慢时间维矩阵;
[0023]
其中,为快时间,tm为慢时间;
[0024]
对快时间维-慢时间维矩阵进行匹配滤波,得到匹配滤波后的快时间维频域-慢时间维时域矩阵s
mf
(f,tm);
[0025]
步骤二:对步骤一输出的结果s
mf
(f,tm)进行宽带keystone变换,实现带宽b内的各个频率对应的模糊数f被修正补偿;
[0026]
在快时间维对宽带keystone变换后的f进行逆傅里叶变换,得到距离徒动校正后的快时间维-慢时间维信号
[0027]
步骤三:对步骤二输出的结果在慢时间维做傅里叶变换,得到相干积累结果;
[0028]
在感兴趣的速度区间[v
min
,v
max
]内重复步骤一和步骤二,对各个搜索速度下的相干积累结果进行极大值检测,获得极大值检测结果的最大值,基于最大值获得对应的时延和此时的速度,完成对弱运动目标参数(时延和多普勒)的估计。
[0029]
本发明的有益效果为:
[0030]
相较于上述文献,本发明提出了一种基于宽带keystone变换的弱运动目标检测方法,在未知目标模糊速度的情况下,通过搜索感兴趣的速度区间,补偿带宽内各个频率对应的模糊数,有效改善了模糊数在带宽内不恒定的现象。通过宽带keystone变换校正了低信噪比下的目标距离徙动,并基于慢时间维的傅里叶变换完成对弱运动目标的相干积累,提高了弱目标回波信噪比,同时能够准确估计目标的参数(时延和多普勒)。
[0031]
所述运动目标为水下航行器,潜艇等。
[0032]
(1)当运动目标在匹配滤波后输出信噪比仍然较低时,即当主动声呐接收到的第m个目标回波的信噪比snr满足0db《snr 10
×
log
10
(bt
p
)<10db时,可认为目标为弱运动目标。本发明所提方法有效解决了水下弱运动目标的距离徙动问题,完成了对弱目标回波的相干积累。
[0033]
snr为主动声呐接收到的第m个目标回波的信噪比;
[0034]
snr 10
×
log
10
(bt
p
)是匹配滤波后快时间维频域-慢时间维时域矩阵s
mf
(f,tm)的信噪比;
[0035]
其中,b为发射信号带宽,t
p
为发射信号脉宽。
[0036]
(2)当主动声呐发射宽带信号时,运动目标的速度模糊数在带宽内不是恒定的。本发明所提方法能够在未知目标模糊速度的情况下,解决了目标速度模糊数在带宽内不恒定的情况,同时能够准确估计目标的参数(时延和多普勒),为低信噪比下探测弱运动目标提供了一种新的方法。
附图说明
[0037]
图1为本发明流程图;
[0038]
图2为本发明仿真实验涉及的主动声呐发射信号示意图;
[0039]
图3a为单次发射脉冲匹配滤波后的信号示意图;
[0040]
图3b为单次发射脉冲距离徙动修正前示意图;
[0041]
图3c为单次发射脉冲距离徙动修正后示意图
[0042]
图4a为本发明仿真实验涉及的时延剖面图;
[0043]
图4b为本发明仿真实验涉及的多普勒剖面图;
[0044]
图5a为传统算法相干积累结果图;
[0045]
图5b为本发明所提算法相干积累结果图;
[0046]
图5c为本算法与传统算法相干积累增益对比图。
具体实施方式
[0047]
具体实施方式一:本实施方式基于宽带keystone变换的弱运动目标检测方法,具体过程为:
[0048]
步骤一:将接收到的多脉冲目标回波整理成二维矩阵其中单次脉冲接收的信号为快时间维矩阵,多脉冲接收的同一时延的信号为慢时间维矩阵;
[0049]
其中,为快时间(主动声呐接收的时间),tm为慢时间(主动声呐接收的时间);
[0050]
对快时间维-慢时间维矩阵进行匹配滤波,得到匹配滤波后的快时间维频域-慢时间维时域矩阵s
mf
(f,tm);
[0051]
步骤二:对步骤一输出的结果s
mf
(f,tm)进行宽带keystone变换,实现带宽b内的各个频率对应的模糊数f被修正补偿;
[0052]
在快时间维对宽带keystone变换后的f进行逆傅里叶变换,得到距离徒动校正后的快时间维-慢时间维信号
[0053]
步骤三:对步骤二输出的结果在慢时间维做傅里叶变换,得到相干积累结果;
[0054]
在感兴趣的速度区间[v
min
,v
max
](设定的)内重复步骤一和步骤二,对各个搜索速度下的相干积累结果进行极大值检测,获得极大值检测结果的最大值,基于最大值获得对应的时延(最大值在图中对应时延)和此时的速度(速度区间[v
min
,v
max
]中此时的速度),完成对弱运动目标参数(时延和多普勒)的估计。
[0055]
所述运动目标为水下航行器,潜艇等。
[0056]
具体实施方式二:本实施方式与具体实施方式一不同的是,所述步骤一中将接收到的多脉冲目标回波整理成二维矩阵其中单次脉冲接收的信号为快时间维矩阵,多脉冲接收的同一时延的信号为慢时间维矩阵;
[0057]
其中,为快时间(主动声呐接收的时间),tm为慢时间(主动声呐接收的时间);
[0058]
对快时间维-慢时间维矩阵进行匹配滤波,得到匹配滤波后的快时间维频域-慢时间维时域矩阵;
[0059]
具体过程为:
[0060]
当主动声呐周期性发射宽带线性调频信号时,主动声呐接收到的第m个目标回波为:
[0061][0062]
其中,a为接收信号幅度,u(t)为t时间的线性调频信号,u(t)=rect(t/t
p
)exp(jπγt2),t为主动声呐周期性发射宽带线性调频信号时对应的时间,rect()为矩形脉冲函数,j为复数的虚部单位,j2=-1;γ为调频斜率,γ=b/t
p
,b为发射信号带宽,t
p
为发射信号脉宽,τ(tm)为传播延迟,fc为中心频率;α为多普勒因子;
[0063]
对式(1)进行下变频,得到基带回波,对基带回波在频域进行匹配滤波,对匹配滤波后的基带回波进行归一化,得到快时间维频域-慢时间维时域矩阵:
[0064][0065]
其中,s
mf
(f,tm)为快时间维频域-慢时间维时域矩阵,f为快时间维频域上的频率,fd为脉冲内多普勒频率,fd=(α-1)fc;
[0066]
u(f)为u(t)的频谱,
[0067]
其它步骤及参数与具体实施方式一相同。
[0068]
具体实施方式三:本实施方式与具体实施方式一或二不同的是,所述慢时间tm=mtr,m=1,2,
…
,m;快时间m为主动声呐发射脉冲的总次数,tr为脉冲重复周期。
[0069]
其它步骤及参数与具体实施方式一或二相同。
[0070]
具体实施方式四:本实施方式与具体实施方式一至三之一不同的是,所述传播延迟τ(tm)=2r(tm)/(c-v),r(tm)为目标距离,v为目标径向速度,c为水下声速。
[0071]
其它步骤及参数与具体实施方式一至三之一相同。
[0072]
具体实施方式五:本实施方式与具体实施方式一至四之一不同的是,所述目标距离r(tm)=r0 vtm,r0为目标初始距离。
[0073]
其它步骤及参数与具体实施方式一至四之一相同。
[0074]
具体实施方式六:本实施方式与具体实施方式一至五之一不同的是,所述多普勒因子α=(c-v)/(c v)。
[0075]
其它步骤及参数与具体实施方式一至五之一相同。
[0076]
具体实施方式七:本实施方式与具体实施方式一至六之一不同的是,所述步骤二中对步骤一输出的结果s
mf
(f,tm)进行宽带keystone变换,实现带宽b内的各个频率对应的模糊数f被修正补偿;
[0077]
在快时间维对宽带keystone变换后的f进行逆傅里叶变换,得到距离徒动校正后的快时间维-慢时间维信号具体过程为:
[0078]
宽带keystone变换即对慢时间维做尺度变换,令:
[0079][0080]
其中,τm为变换后的虚拟慢时间;
[0081]
将式(3)代入式(2)中,可得:
[0082][0083]
其中,s
fτ
(f,τm)为对s
mf
(f,tm)进行宽带keystone变换后的快时间维频域-慢时间维时域矩阵;
[0084]
当目标速度模糊时:
[0085]
2v(fc f)/c=fa f
·
prf,|fa|<prf/2
ꢀꢀꢀ
(5)
[0086]
其中,fa为实际检测到的多普勒频率,f为模糊数,prf为脉冲重复频率,prf=1/tr;
[0087]
为保证频率f、慢时间tm和虚拟慢时间τm在宽带keystone变换前后为整数值,设s
mf
(n,m)和s
fτ
(n,m)分别为s
mf
(f,tm)和s
fτ
(f,τm)的离散表示形式,利用辛格函数sinc对s
mf
(n,m)进行插值(保证频率f、慢时间tm和虚拟慢时间τm在宽带keystone变换前后为整数值),实现带宽b内的各个频率对应的模糊数f被修正补偿(补偿函数c(f)实现的);
[0088]
表达式为:
[0089][0090]
其中,c(f)为各频率处模糊数的补偿函数;s
fτ
(n,m)为s
fτ
(f,τm)的离散表示形式,l为插值的索引量,m为主动声呐发射脉冲的总次数,s
mf
(n,l)为s
mf
(n,m)在辛格函数sinc插值时的索引值,c为水下声速,n为对快时间维频域上的频率f离散后的快时间维频域上的点,m为对慢时间tm和虚拟慢时间τm离散后的慢时间点数;
[0091]
对经过宽带keystone变换后的快时间维频域-慢时间维时域矩阵s
fτ
(f,τm)在快时间维进行逆傅里叶变换,得到距离徒动校正后的快时间维-慢时间维信号慢时间维信号
[0092]
其中:
[0093][0094]
其中,为距离徒动校正后的快时间维-慢时间维信号,χ(α,fd)为中间变量。
[0095]
其它步骤及参数与具体实施方式一至六之一相同。
[0096]
具体实施方式八:本实施方式与具体实施方式一至七之一不同的是,所述各频率
处模糊数的补偿函数模糊数f和频率f有关,表达式为
[0097]
其它步骤及参数与具体实施方式一至七之一相同。
[0098]
具体实施方式九:本实施方式与具体实施方式一至八之一不同的是,所述步骤三中对步骤二输出的结果在慢时间维做傅里叶变换,得到相干积累结果;
[0099]
在感兴趣的速度区间[v
min
,v
max
](设定的)内重复步骤一和步骤二,对各个搜索速度下的相干积累结果进行极大值检测,获得极大值检测结果的最大值,基于最大值获得对应的时延(最大值在图中对应时延)和此时的速度(速度区间[v
min
,v
max
]中此时的速度),完成对弱运动目标参数(时延和多普勒)的估计;具体过程为:
[0100]
对式(7)在慢时间维做傅里叶变换,得到相干积累结果
[0101][0102]
其中,为极大值检测结果的最大值对应的多普勒;
[0103]
搜索感兴趣的速度区间[v
min
,v
max
],并重复式(2)-式(9);
[0104]vmin
为目标径向速度最小值,v
max
为目标径向速度最大值;
[0105]
对搜索速度下的相干积累结果进行极大值检测,记录相干积累峰值最大值对应的时延和多普勒:
[0106][0107]
其中,τ(i)为第i个搜索速度下相干积累峰值最大值对应的时延,fd(i)为第i个搜索速度下相干积累峰值最大值对应的多普勒。
[0108]
以上为宽带keystone修正目标距离徙动并完成相干积累,同时估计目标参数(时延和多普勒)的所有步骤。
[0109]
其它步骤及参数与具体实施方式一至八之一相同。
[0110]
具体实施方式十:本实施方式与具体实施方式一至九之一不同的是,所述弱运动目标为:
[0111]
当主动声呐接收到的第m个目标回波的信噪比snr满足0db《snr 10
×
log
10
(bt
p
)<10db,可认为目标为弱运动目标;
[0112]
snr为主动声呐接收到的第m个目标回波的信噪比;
[0113]
snr 10
×
log
10
(bt
p
)是匹配滤波后快时间维频域-慢时间维时域矩阵s
mf
(f,tm)的信噪比;
[0114]
其中,b为发射信号带宽,t
p
为发射信号脉宽。
[0115]
其它步骤及参数与具体实施方式一至九之一相同。
[0116]
仿真实验
[0117]
仿真条件:主动声呐周期性发射lfm信号,lfm信号中心频率为2khz,带宽1khz,脉宽0.1s,目标回波信噪比为-15db。选取脉冲重复间隔为2s,相干积累脉冲数为30。动目标以径向速度v=1.05m/s逐渐靠近声呐。所有结果均按照信号能量最大值归一化。
[0118]
仿真总结:
[0119]
本发明对低信噪比下的弱运动目标进行相干积累的仿真并给出分析结果。
[0120]
由图3a可以看出,单次发射脉冲下匹配滤波后目标信号输出信噪比约为5db,在0db《snr 10
×
log
10
(bt)<10db范围内,属于弱运动目标;由图3b、3c可以看出,利用本发明所提算法可以修正目标的线性距离徙动。
[0121]
由图4a、4b可以看出,本发明算法相干积累后的信噪比增益较积累前提高了约为14db;目标在初始时刻的时延约为0.13s,补偿模糊数后的不模糊多普勒约为-0.2hz,即本发明算法能够准确估计目标参数(时延和多普勒)。
[0122]
所述运动目标为水下航行器,潜艇等。
[0123]
图5a、5b、5c给出了本发明所提算法与补偿固定模糊数的传统算法的性能对比,可以看出,传统算法的相干积累峰值低于本文所提算法;图5c中传统算法的相干积累增益约7db,比本文所提算法相干积累增益低约7db。该仿真实验验证了本发明的可行性,具有一定的实用价值。
[0124]
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。