1.本发明属于地球物理探测领域,具体为一种地质雷达三维超前探测数据叠加方法,该方法以三维超前探测地质雷达数据为基础,依据地质雷达探测区域在三维空间的球体分布特征,将不同观测点的地质雷达数据叠加到统一坐标系下,实现数据的叠加,降低地质雷达信号多次波干扰,有利于三维空间的目标定位。
背景技术:
2.在煤矿开采过程中,容易引发地质构造变化,隐伏的地质构造异常(如断层、陷落柱、褶曲等)极易导致矿井开采事故。主要的开采事故包括顶板破坏、煤和瓦斯突出、矿井涌水等。地质雷达作为有效的物探手段,适用于探测断层、陷落柱、褶曲等地质构造异常。三维空间扫描地质雷达通过旋转地质雷达天线的角度,用于工作面前方三维空间探测,也可用于侧帮、回采区等区域的定向探测,实现了地质构造的快速识别和三维成像。
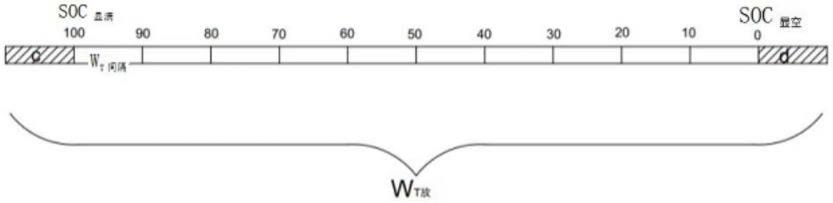
3.三维空间扫描地质雷达向工作面发送脉冲形式的高频宽带电磁波,一部分经发射天线直接到达接收天线形成耦合波;经发射天线发射后遇空气与路面分界面后未进入地下而直接反射回来被接收天线接收,形成直达波,耦合波和直达波常常被合称直耦波,常常用来判断时间零点,作为地下目标体深度的判断参考依据,另一部分电磁波进入工作面前方,在介质中传播,当遇到存在电性差异的目标体(如断层、陷落柱、褶曲等)或不同介质界面时,电磁波便产生反射,反射电磁波返回到工作面时由接收天线所接收。接收信号经过采集、处理、存储,就成为包含有工作面前方介质信息的地质雷达数据。
4.三维空间扫描地质雷达通过旋转地质雷达天线的角度,用于工作面前方三维空间探测。测线在三维空间的形态为弧形,该弧形以天线位置为圆心。因此,地质雷达探测区域在三维空间呈现球体分布特征。通过本发明一种地质雷达三维超前探测数据叠加方法可以将不同观测点的地质雷达数据叠加到统一坐标系下,实现数据的叠加,降低地质雷达信号多次波干扰,有利于三维空间的目标定位。
技术实现要素:
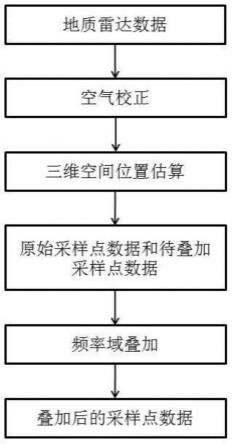
5.本发明的目的是根据地质雷达数据的特点,通过空气校正和三维空间位置估算,将原始采样点数据和待叠加采样点数据对应起来,通过频率域叠加,得到叠加后的采样点数据。
6.本方法具体步骤如下:
7.步骤(a1):等待叠加的地质雷达数据分别为d1(αi,βj,k),d2(αi,βj,k),其中αi为水平角,βj为俯仰角,n为角度总数,k为采样点序号,h为采样点总数,首先进行空气校正,将空气中的对应里程换算为地下介质中的里程,对于某一水平角αi和俯仰角βj下的一维雷达数据d1(αi,βj,k),经过空气校正函数g()校正后得到
[0008][0009]
其中,d1(αi,βj,k)经过校正后的数据为d2(αi,βj,k)经过校正后的数据为
[0010]
步骤(a2):对于校正后的雷达数据不妨令原始采样点数据为下面通过三维空间位置估算获得对应位置的待叠加采样点数据,已知u1,v1,k1分别为数据的水平角、俯仰角和采样点序号,v为地下介质中的电磁波平均波速,δt为单位采样点对应的探测时窗,不妨令观测点水平间距为d,高程间距为h,将空气中的里程校正为地下介质中的里程分别为待叠加采样点数据对应的水平角u2、俯仰角v2和采样点序号k2分别为:
[0011][0012][0013][0014]
步骤(a3):对采样点数据为和进行频率域叠加,将叠加到之上,叠加后的结果为:
[0015][0016]
其中,f()和f-1
()分别为频率域变换函数和逆变换函数,为叠加后的采样点数据。
[0017]
本发明有以下优点:
[0018]
1、通过本发明提出的空气校正函数,能够将空气中的对应里程换算为地下介质中的里程,从而提高三维空间的目标定位准确性。
[0019]
2、通过本发明提出的三维空间位置估算方法,可以获得对应位置的待叠加采样点
数据,为不同观测点的地质雷达数据叠加创造条件。
附图说明
[0020]
图1本发明技术方法流程图
[0021]
图2本发明地质雷达数据叠加前后对比图
具体实施方式
[0022]
本发明针对三维空间扫描地质雷达天线旋转采集数据特点,通过空气校正和三维空间位置估算,将原始采样点数据和待叠加采样点数据对应起来,通过频率域叠加,得到叠加后的采样点数据,能够降低地质雷达信号多次波干扰,有利于三维空间的目标定位。
[0023]
本发明一种地质雷达三维超前探测数据叠加方法要求观测点在同一平面内,且该平面与探测方向相互垂直,此时具体步骤如下:
[0024]
(1)等待叠加的地质雷达数据分别为d1(αi,βj,k),d2(αi,βj,k),其中αi为水平角,βj为俯仰角,n为角度总数,k为采样点序号,h为采样点总数,首先进行空气校正,将空气中的对应里程换算为地下介质中的里程,对于某一水平角αi和俯仰角βj下的一维雷达数据d1(αi,βj,k),经过空气校正函数g()校正后得到
[0025][0026]
其中,d1(αi,βj,k)经过校正后的数据为d2(αi,βj,k)经过校正后的数据为
[0027]
(2)对于校正后的雷达数据不妨令原始采样点数据为下面通过三维空间位置估算获得对应位置的待叠加采样点数据,已知u1,v1,k1分别为数据的水平角、俯仰角和采样点序号,v为地下介质中的电磁波平均波速,δt为单位采样点对应的探测时窗,不妨令观测点水平间距为d,高程间距为h,将空气中的里程校正为地下介质中的里程分别为待叠加采样点数据对应的水平角u2、俯仰角v2和采样点序号k2分别为:
[0028][0029]
[0030][0031]
(3)对采样点数据为和进行频率域叠加,将叠加到之上,叠加后的结果为:
[0032][0033]
其中,f()和f-1
()分别为频率域变换函数和逆变换函数,为叠加后的采样点数据。
技术特征:
1.一种地质雷达三维超前探测数据叠加方法,该方法以三维超前探测地质雷达数据为基础,依据地质雷达探测区域在三维空间的球体分布特征,将不同观测点的地质雷达数据叠加到统一坐标系下,实现数据的叠加,具体步骤如下:步骤(a1):等待叠加的地质雷达数据分别为d1(α
i
,β
j
,k),d2(α
i
,β
j
,k),其中α
i
为水平角,β
j
为俯仰角,n为角度总数,k为采样点序号,h为采样点总数,首先进行空气校正,将空气中的对应里程换算为地下介质中的里程,对于某一水平角α
i
和俯仰角β
j
下的一维雷达数据d1(α
i
,β
j
,k),经过空气校正函数g()校正后得到其中,d1(α
i
,β
j
,k)经过校正后的数据为d2(α
i
,β
j
,k)经过校正后的数据为步骤(a2):对于校正后的雷达数据不妨令原始采样点数据为下面通过三维空间位置估算获得对应位置的待叠加采样点数据,已知u1,v1,k1分别为数据的水平角、俯仰角和采样点序号,v为地下介质中的电磁波平均波速,δt为单位采样点对应的探测时窗,不妨令观测点水平间距为d,高程间距为h,将空气中的里程校正为地下介质中的里程分别为待叠加采样点数据对应的水平角u2、俯仰角v2和采样点序号k2分别为:分别为:分别为:步骤(a3):对采样点数据为和进行频率域叠加,将
叠加到之上,叠加后的结果为:其中,f()和f-1
()分别为频率域变换函数和逆变换函数,为叠加后的采样点数据。
技术总结
本发明提供了一种地质雷达三维超前探测数据叠加方法,依据地质雷达探测区域在三维空间的球体分布特征,通过空气校正和三维空间位置估算,将原始采样点数据和待叠加采样点数据对应起来,将不同观测点的地质雷达数据叠加到统一坐标系下,通过频率域叠加,得到叠加后的采样点数据,降低地质雷达信号多次波干扰,有利于三维空间的目标定位。利于三维空间的目标定位。利于三维空间的目标定位。
技术研发人员:乔旭 杨峰
受保护的技术使用者:中国矿业大学(北京)
技术研发日:2022.11.09
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。