1.本发明涉及焊接机器人技术领域,具体说是一种全方位工业自动化焊接机器人。
背景技术:
2.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(iso)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(manipulator),具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
3.现有的焊接机器人在在递送焊丝的时候被焊接金属表面存在氧化物、灰尘等污垢,阻碍工件基体金属和焊料之间以原子状态相互扩散,因此需要清除氧化物等以出清洁显露出金属基体,焊丝在长时间放置表面会生铁锈以及毛刺,这些铁锈与毛刺如果不进行处理会对后续焊接产生送丝不稳定断续焊接,从而造成对物体焊接质量降低,在一些金属焊接的时候需要涂抹一些助焊剂,依靠焊剂的化学作用,与被焊金属表面的氧化物化合,在焊接温度下形成液态化台物,使被焊金属部位表面的金属原子与熔融焊料的原子相互扩散,以达到锡焊连接的目的用于辅助热传递,去除氧化物降低被焊接物体的表面张力,提高液态焊料流动、浸润的性能,使焊料合金能够很好地与被焊接材料结合并形成可靠焊点。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种全方位工业自动化焊接机器人。
5.本发明解决其技术问题所采用的技术方案是:一种全方位工业自动化焊接机器人,包括本体、送丝机构、涂抹机构、打磨机构、收集机构,所述本体一端设有送丝机构,所述送丝机构一端设有涂抹机构,所述涂抹机构上端设有打磨机构,所述打磨机构下端设有收集机构;
6.优选的,所述本体包括底板,所述底板上端固定连接有机械臂,所述机械臂上端固定连接有焊枪,所述机械臂一侧固定连接有固定块,所述固定块内部设置有第一空心槽,所述固定块内部设置有第二空心槽。
7.优选的,所述本体还包括海绵,所述第二空心槽内部设置有海绵,所述固定块内部设有送丝槽,所述送丝槽内部侧壁固定连接有清理块,所述清理块内部设置有焊丝,所述焊丝一端缠绕有缠绕辊,所述缠绕辊一端与固定块固定连接。
8.优选的,所述送丝机构包括第一电动机,所述第一电动机一端与固定块固定连接,所述第一电动机一端固定连接有第一转轴。
9.优选的,所述送丝机构还包括第一旋转轮,所述第一转轴侧壁固定连接有第一旋转轮。
10.优选的,所述涂抹机构包括第一传送轮,所述第一传送轮中间固定连接有第一转
轴,所述第一传送轮侧壁紧密贴合有第一皮带,所述第一皮带一端紧密贴合有第二传送轮,所述第二传送轮中间固定连接有第二转轴,所述第二转轴一端与固定块转动连接,所述第二转轴侧壁固定连接有第二旋转轮。
11.优选的,所述涂抹机构还包括第一钢珠,所述第二旋转轮一端紧密贴合有第一钢珠,所述第二转轴侧壁固定连接有第一直齿轮,所述第一直齿轮一端啮合有第二直齿轮,所述第二直齿轮中间固定连接有第三转轴,所述第三转轴一端与固定块转动连接,所述第三转轴一端固定连接有第三旋转轮,所述第三旋转轮一端侧壁与第二钢珠紧密贴合。
12.优选的,所述打磨机构包括第二电动机,所述第二电动机一端与固定块固定连接,所述第二电动机一端固定连接有第一转动杆,所述第一转动杆一端与固定块转动连接,所述第一转动杆侧壁固定连接有第一传动轮,所述第一传动轮侧壁紧密贴合有第二皮带,所述第二皮带一端紧密贴合有第二传动轮,所述第二传动轮中间固定连接有第二转动杆,所述第二转动杆一端与固定块转动连接,所述第二转动杆一端与固定块转动连接。
13.优选的,所述打磨机构还包括第一打磨块,所述第二转动杆一端固定连接有第一打磨块,所述第二转动杆侧壁固定连接有第三直齿轮,所述第三直齿轮一端啮合有第四直齿轮,所述第四直齿轮中间固定连接有第四转轴,所述第四转轴一端固定连接有第二打磨块。
14.优选的,所述收集机构包括蜗杆,所述蜗杆中间与第一转动杆固定连接,所述蜗杆一端啮合有涡轮,所述涡轮中间固定连接有第三转动杆。
15.优选的,所述收集机构还包括螺旋叶,所述第三转动杆侧壁固定连接有螺旋叶,所述第三转动杆侧壁固定连接有轴承,所述轴承侧壁与固定块固定连接。
16.本发明的有益效果:
17.(1)本发明所述的一种全方位工业自动化焊接机器人,通过机械臂的活动带动焊枪全方位对物体进行焊接,在焊丝向前推进的过程中清理块套设于焊丝外部,这样清理块就会将打磨产生的铁屑杂质擦拭掉,避免铁屑杂质附着在焊丝的外壁对后续焊接造成影响。
18.(2)本发明所述的一种全方位工业自动化焊接机器人,在第一转轴转动的时候带动第一传送轮转动进而带动第二旋转轮转动,第二旋转轮转动带动第一钢珠转动,在第二转轴转动进而带动第三旋转轮转动,第三旋转轮转动带动第二钢珠转动,通过第二旋转轮与第三旋转轮可以包裹住焊丝在第一钢珠转动将海绵上助焊剂转移到第二旋转轮表面,第二旋转轮转动将表面的助焊剂转移到焊丝的表面,由于第二旋转轮的表面是半圆形凹槽,通过第二旋转轮与第三旋转轮可以与焊丝贴合更加完全,从而使助焊剂均匀涂抹于焊丝的表面。
19.(3)本发明所述的一种全方位工业自动化焊接机器人,在焊丝向前推进的过程中启动第二电动机转动进而带动第一打磨块与第二打磨块转动对焊丝进行打磨,打磨块将焊丝的表面铁锈毛刺清理干净,使焊丝的表面光滑,避免因为铁锈毛刺造成送丝不稳定导致断续焊接。
20.(4)本发明所述的一种全方位工业自动化焊接机器人,在第一转动杆转动的同时带动蜗杆转动,蜗杆转动带动涡轮转动,涡轮转动带动第三转动杆转动带动螺旋叶转动,螺旋叶转动可以将铁屑杂质收集到第一空心槽内部,同时通过螺旋叶的设置可以避免在机械
臂倒立的时候铁屑杂质重新倒入送丝槽内部造成堵塞。
附图说明
21.下面结合附图和实施例对本发明进一步说明。
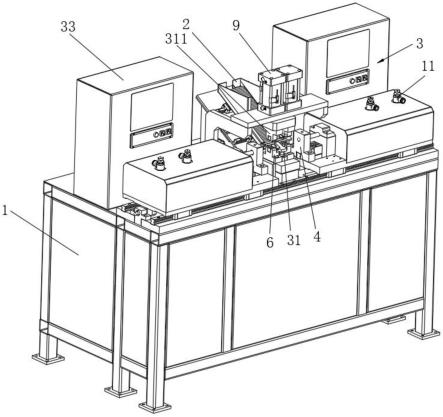
22.图1为本发明提供的整体结构示意图;
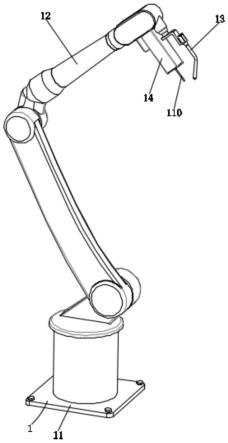
23.图2为图1所示的机械臂与焊枪连接结构示意图;
24.图3为图1所示的送丝槽与清理块连接结构示意图;
25.图4为图3所示的第一空心槽结构示意图;
26.图5为图3所示的第一转轴与第一旋转轮连接结构示意图;
27.图6为图3所示的第一传送轮与第一皮带连接结构示意图;
28.图7为图3所示的第二转轴与第二旋转轮连接结构示意图;
29.图8为图4所示的a部放大示意图;
30.图9为图8所示的第三直齿轮与第四直齿轮连接结构示意图;
31.图10为图8所示的蜗杆与涡轮连接结构示意图。
32.图中:1、本体;11、底板;12、机械臂;13、焊枪;14、固定块;15、第一空心槽;16、第二空心槽;17、海绵;18、送丝槽;19、清理块;110、焊丝;111、缠绕辊;2、送丝机构;21、第一电动机;22、第一转轴;23、第一旋转轮;3、涂抹机构;31、第一传送轮;32、第一皮带;33、第二传送轮;34、第二转轴;35、第二旋转轮;36、第一钢珠;37、第一直齿轮;38、第二直齿轮;39、第三转轴;310、第三旋转轮;311、第二钢珠;4、打磨机构;41、第二电动机;42、第一转动杆;43、第一传动轮;44、第二皮带;45、第二传动轮;46、第二转动杆;47、打磨块;48、第三直齿轮;49、第四直齿轮;410、第四转轴;411、第二打磨块;5、收集机构;51、蜗杆;52、涡轮;53、第三转动杆;54、螺旋叶;55、轴承。
具体实施方式
33.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
34.如图1-图10所示,本发明所述的一种全方位工业自动化焊接机器人,包括本体1、送丝机构2、涂抹机构3、打磨机构4、收集机构5,所述本体1一端设有送丝机构2,所述送丝机构2一端设有涂抹机构3,所述涂抹机构3上端设有打磨机构4,所述打磨机构4下端设有收集机构5;通过第一电动机21转动进而带动焊丝110向前推进,在第一转轴22转动的时候进而带动第二旋转轮35转动,第二旋转轮35转动带动第一钢珠转动,第一钢珠转动将海绵17上助焊剂转移到第二旋转轮35表面,第二旋转轮35转动将表面的助焊剂转移到焊丝110的表面,由于第二旋转轮35的表面是半圆形凹槽,这样可以与焊丝110贴合更加完全,从而使助焊剂均匀涂抹于焊丝110的表面,在焊丝110向前推进的过程中启动第二电动机41转动进而带动第一打磨块47、第二打磨块411转动对焊丝110进行打磨,通过螺旋叶54转动可以将铁屑杂质收集到第一空心槽15内部定期进行清理。
35.优选的,所述本体1包括底板11,所述底板11上端固定连接有机械臂12,所述机械臂12上端固定连接有焊枪13,所述机械臂12一侧固定连接有固定块14,所述固定块14内部设置有第一空心槽15,所述固定块14内部设置有第二空心槽16,所述第二空心槽16内部设
置有海绵17,所述固定块14内部设有送丝槽18,所述送丝槽18内部侧壁固定连接有清理块19,所述清理块19内部设置有焊丝110,所述焊丝110一端缠绕有缠绕辊111,所述缠绕辊111一端与固定块14固定连接;通过机械臂12的活动带动焊枪13全方位对物体进行焊接,在焊丝110向前推进的过程中清理块19套设于焊丝110外部,这样清理块19就会将打磨产生的铁屑杂质擦拭掉,避免铁屑杂质附着在焊丝110的外壁对后续焊接造成影响。
36.优选的,所述送丝机构2包括第一电动机21,所述第一电动机21一端与固定块14固定连接,所述第一电动机21一端固定连接有第一转轴22,所述第一转轴22侧壁固定连接有第一旋转轮23;通过机械臂12的活动带动焊枪13对物体进行焊接时通过启动第一电动机21带动第一转轴22转动,第一转轴22转动带动第一旋转轮23转动,第一旋转轮23转动带动焊丝110向前推进。
37.优选的,所述涂抹机构3包括第一传送轮31,所述第一传送轮31中间固定连接有第一转轴22,所述第一传送轮31侧壁紧密贴合有第一皮带32,所述第一皮带32一端紧密贴合有第二传送轮33,所述第二传送轮33中间固定连接有第二转轴34,所述第二转轴34一端与固定块14转动连接,所述第二转轴34侧壁固定连接有第二旋转轮35,所述第二旋转轮35一端紧密贴合有第一钢珠36,所述第二转轴34侧壁固定连接有第一直齿轮37,所述第一直齿轮37一端啮合有第二直齿轮38,所述第二直齿轮38中间固定连接有第三转轴39,所述第三转轴39一端与固定块14转动连接,所述第三转轴39一端固定连接有第三旋转轮310,所述第三旋转轮310一端侧壁与第二钢珠311紧密贴合;在对物体进行焊接的过程中熔融焊料表面具有一定的张力,就像雨水落在荷叶上,由于液体的表面张力会立即聚结成圆珠状的水滴。熔融焊料的表面张力会阻止其向母材表面漫流,影响润湿的正常进行。当助焊剂覆盖在熔融焊料的表面时,可降低液态焊料的表面张力,使润湿性能明显得到提高,进而提高被焊接物体的焊接质量,在第一转轴22转动的时候带动第一传送轮31转动,第一传送轮31转动带动第一皮带32转动,第一皮带32转动带动第二传送轮33转动,第二传送轮33转动带动第二转轴34转动,第二转轴34转动带动第二旋转轮35转动,第二旋转轮35转动带动第一钢珠36转动,在第二转轴34转动带动第一直齿轮37转动,第一直齿轮37转动带动第二直齿轮38转动,第二直齿轮38转动带动第三转轴39转动,在第二转轴34转动的同时带动第三旋转轮310转动,第三旋转轮310转动带动第二钢珠311转动,通过第二旋转轮35与第三旋转轮310可以包裹住焊丝110,在第一钢珠36转动将海绵17上助焊剂转移到第二旋转轮35表面,第二旋转轮35转动将表面的助焊剂转移到焊丝110的表面,由于第二旋转轮35的表面是半圆形凹槽,通过第二旋转轮35与第三旋转轮310可以与焊丝110贴合更加完全,从而使助焊剂均匀涂抹于焊丝110的表面。
38.优选的,所述打磨机构4包括第二电动机41,所述第二电动机41一端与固定块14固定连接,所述第二电动机41一端固定连接有第一转动杆42,所述第一转动杆42一端与固定块14转动连接,所述第一转动杆42侧壁固定连接有第一传动轮43,所述第一传动轮43侧壁紧密贴合有第二皮带44,所述第二皮带44一端紧密贴合有第二传动轮45,所述第二传动轮45中间固定连接有第二转动杆46,所述第二转动杆46一端与固定块14转动连接,所述第二转动杆46一端与固定块14转动连接,所述第二转动杆46一端固定连接有第一打磨块47,所述第二转动杆46侧壁固定连接有第三直齿轮48,所述第三直齿轮48一端啮合有第四直齿轮49,所述第四直齿轮49中间固定连接有第四转轴410,在焊接的过程中焊丝110在长时间放
置的时候会出现表面生锈毛刺,这些铁锈毛刺如果不进行及时处理会对后续焊接造成影响,从而影响被焊接物体的焊接质量,因此需要去除焊丝110的表面氧化物,降低被焊接物体的表面张力,在焊丝110向前推进的过程中启动第二电动机41转动,第二电动机41转动带动第一转动杆42转动,第一转动杆42转动带动第一传动轮43转动,第一传动轮43转动带动第二皮带44转动,第二皮带44转动带动第二传动轮45转动,第二传动轮45转动带动第二转动杆46转动,第二转动杆46转动带动第一打磨块47转动,在第二转动杆46转动带动第三直齿轮48转动,第三直齿轮48转动带动第四直齿轮49转动,第四直齿轮49转动带动第四转轴410转动,第四转轴410转动带动第二打磨块411转动,通过第一打磨块47与第二打磨块411转动对焊丝110进行打磨,打磨块47将焊丝110的表面铁锈毛刺清理干净,使焊丝110的表面光滑,避免因为铁锈毛刺造成送丝不稳定导致断续焊接。
39.优选的,所述收集机构5包括蜗杆51,所述蜗杆51中间与第一转动杆42固定连接,所述蜗杆51一端啮合有涡轮52,所述涡轮52中间固定连接有第三转动杆53,所述第三转动杆53侧壁固定连接有螺旋叶54,所述第三转动杆53侧壁固定连接有轴承55,所述轴承55侧壁与固定块14固定连接;在对焊丝110进行打磨的过程中会有一些铁屑杂质掉落,这些铁屑杂质需要进行清理不然会造成堵塞送丝槽18,在第一转动杆42转动的同时带动蜗杆51转动,蜗杆51转动带动涡轮52转动,涡轮52转动带动第三转动杆53转动带动螺旋叶54转动,螺旋叶54转动可以将铁屑杂质收集到第一空心槽15内部,同时通过螺旋叶的设置可以避免在机械臂倒立的时候铁屑杂质重新倒入送丝槽18内部造成堵塞。
40.本发明在使用时首先通过机械臂12的活动带动焊枪13全方位对物体进行焊接,通过机械臂12的活动带动焊枪13对物体进行焊接时通过启动第一电动机21带动第一转轴22转动,第一转轴22转动带动第一旋转轮23转动,第一旋转轮23转动带动焊丝110向前推进,在焊丝110向前推进的过程中清理块19套设于焊丝110外部,这样清理块19就会将打磨产生的铁屑杂质擦拭掉,避免铁屑杂质附着在焊丝110的外壁对后续焊接造成影响,在对物体进行焊接的过程中熔融焊料表面具有一定的张力,就像雨水落在荷叶上,由于液体的表面张力会立即聚结成圆珠状的水滴,熔融焊料的表面张力会阻止其向母材表面漫流,影响润湿的正常进行,当助焊剂覆盖在熔融焊料的表面时,可降低液态焊料的表面张力,使润湿性能明显得到提高,进而提高被焊接物体的焊接质量,在第一转轴22转动的时候带动第一传送轮31转动,第一传送轮31转动带动第一皮带32转动,第一皮带32转动带动第二传送轮33转动,第二传送轮33转动带动第二转轴34转动,第二转轴34转动带动第二旋转轮35转动,第二旋转轮35转动带动第一钢珠36转动,在第二转轴34转动带动第一直齿轮37转动,第一直齿轮37转动带动第二直齿轮38转动,第二直齿轮38转动带动第三转轴39转动,在第二转轴34转动的同时带动第三旋转轮310转动,第三旋转轮310转动带动第二钢珠311转动,通过第二旋转轮35与第三旋转轮310可以包裹住焊丝110,在第一钢珠36转动将海绵17上助焊剂转移到第二旋转轮35表面,第二旋转轮35转动将表面的助焊剂转移到焊丝110的表面,由于第二旋转轮35的表面是半圆形凹槽,通过第二旋转轮35与第三旋转轮310可以与焊丝110贴合更加完全,从而使助焊剂均匀涂抹于焊丝110的表面,在焊接的过程中焊丝110在长时间放置的时候会出现表面生锈毛刺,这些铁锈毛刺如果不进行及时处理会对后续焊接造成影响,从而影响被焊接物体的焊接质量,因此需要去除焊丝110的表面氧化物,降低被焊接物体的表面张力,在焊丝110向前推进的过程中启动第二电动机41转动,第二电动机41转动带动第
一转动杆42转动,第一转动杆42转动带动第一传动轮43转动,第一传动轮43转动带动第二皮带44转动,第二皮带44转动带动第二传动轮45转动,第二传动轮45转动带动第二转动杆46转动,第二转动杆46转动带动第一打磨块47转动,在第二转动杆46转动带动第三直齿轮48转动,第三直齿轮48转动带动第四直齿轮49转动,第四直齿轮49转动带动第四转轴410转动,第四转轴410转动带动第二打磨块411转动,通过第一打磨块47与第二打磨块411转动对焊丝110进行打磨,打磨块47将焊丝110的表面铁锈毛刺清理干净,使焊丝110的表面光滑,避免因为铁锈毛刺造成送丝不稳定导致断续焊接,在对焊丝110进行打磨的过程中会有一些铁屑杂质掉落,这些铁屑杂质需要进行清理不然会造成堵塞送丝槽18,在第一转动杆42转动的同时带动蜗杆51转动,蜗杆51转动带动涡轮52转动,涡轮52转动带动第三转动杆53转动带动螺旋叶54转动,螺旋叶54转动可以将铁屑杂质收集到第一空心槽15内部,同时通过螺旋叶的设置可以避免在机械臂倒立的时候铁屑杂质重新倒入送丝槽18内部造成堵塞。
41.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施方式和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。