1.本技术涉及新能源汽车技术领域,特别涉及一种电子驻车制动的冗余控制装置、系统、方法及介质。
背景技术:
2.由于世界石油资源的日益匮乏,以及汽车尾气的排放而造成的环境污染,新能源汽车具有运行成本低、零排放、噪音低、能充分利用夜间波谷充电等优点,可以满足用户上班代步、外出办事、租赁出行等基本需求,深受广大消费者的青睐。
3.相关技术中,新能源汽车在运行电子驻车制动的同时还需要配合机械结构的使用,使得车辆处于停车静止状态以防出现溜车等现象,但是电子驻车开关是电子驻车系统的重要安全部件,电子驻车开关电路的设计直接影响驻车系统的安全性能,而目前出现的电子驻车开关没有专门针对为冗余电子驻车系统进行设计,均是沿用非冗余电子驻车的电子驻车系统,造成电子驻车系统的整体设计缺陷,一旦电子驻车无法使用可能会造成车辆故障,降低用户的用车安全。
技术实现要素:
4.本技术提供一种电子驻车制动的冗余控制装置、系统、方法及介质,以解决相关技术中非冗余电子驻车系统搭配p档机械结构导致成本较高及操作复杂,且非冗余电子驻车系统一旦故障无法保证车辆的行车安全等问题。
5.本技术第一方面实施例提供一种电子驻车制动的冗余控制装置,包括:第一驱动组件,用于驱动车辆的电子卡钳夹紧或释放制动盘;第二驱动组件,用于接通或断开所述车辆的驻车制动系统与所述电子卡钳之间的连接;整车控制器,用于在识别到所述驻车制动系统处于预设异常状态时,控制所述第二驱动组件断开所述驻车制动系统与所述电子卡钳之间的连接,并在所述车辆满足预设驻车制动条件时,控制所述第一驱动组件驱动所述电子卡钳夹紧所述制动盘,并在所述车辆启动时,控制所述第一驱动组件驱动所述电子卡钳释放所述制动盘。
6.可选地,所述第一驱动组件包括第一至第四继电器,所述第二驱动组件包括第五和第六继电器,其中,所述第一至第四继电器,用于根据所述整车控制器输出的电平信号闭合或断开,其中,若所述第四继电器闭合,则第五继电器和第六继电器均断开,以断开所述驻车制动系统与所述电子卡钳之间的连接;若所述第四继电器断开,则所述第五继电器和所述第六继电器均闭合,以接通所述驻车制动系统与所述电子卡钳之间的连接。
7.可选地,所述整车控制器进一步用于在所述车辆满足预设驻车制动条件时,控制第一继电器和第三继电器闭合、第二继电器断开,以驱动所述电子卡钳的电机正传,夹紧所述制动盘;在所述车辆启动时,控制所述第一继电器和所述第二继电器闭合、所述第三继电器断开,以驱动所述电子卡钳的电机反转,释放所述制动盘。
8.可选地,第一继电器和第四继电器为常开继电器,第二继电器和第三继电器双开
继电器,第五继电器和第六继电器为常闭继电器。
9.可选地,所述整车控制器进一步用于在未接收到所述驻车制动系统的can报文时,判定所述驻车制动系统处于预设异常状态,否则判定所述驻车制动系统处于正常状态。
10.可选地,若所述驻车制动系统处于正常状态,则所述整车控制器输出电平信号的引脚处于不工作状态,所述驻车制动系统与所述电子卡钳之间的连接接通。
11.可选地,所述电子卡钳包括左电子卡钳和/或右电子卡钳。
12.本技术第二方面实施例提供一种电子驻车制动的冗余控制系统,包括:电子卡钳;驻车制动系统,所述驻车制动系统与所述电子卡钳之间硬连接,用于控制所述电子卡钳夹紧或释放制动盘;如上述实施例所述的电子驻车制动的冗余控制装置,用于在识别到所述驻车制动系统处于预设异常状态时,控制所述第二驱动组件断开所述驻车制动系统与所述电子卡钳之间的连接,并在所述车辆满足预设驻车制动条件时,控制所述第一驱动组件驱动所述电子卡钳夹紧所述制动盘,并在所述车辆启动时,控制所述第一驱动组件驱动所述电子卡钳释放所述制动盘。
13.本技术第三方面实施例提供一种电子驻车制动的冗余控制方法,所述方法应用于如上述实施例所述的电子驻车制动的冗余控制装置,包括以下步骤:识别到所述驻车制动系统是否处于预设异常状态;若识别到所述驻车制动系统处于预设异常状态,则控制所述第二驱动组件断开所述驻车制动系统与所述电子卡钳之间的连接,并在所述车辆满足预设驻车制动条件时,控制所述第一驱动组件驱动所述电子卡钳夹紧所述制动盘,并在所述车辆启动时,控制所述第一驱动组件驱动所述电子卡钳释放所述制动盘。
14.本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的电子驻车制动的冗余控制方法。
15.由此,本技术至少具有如下有益效果:
16.本技术实施例通过电子驻车制动的冗余控制装置可以在驻车制动系统异常时实现制动功能,实现驻车制动功能的冗余,提升车辆的驻车制动的可靠性,从而可以低成本实现取消p档机械机构后的冗余电子驻车制动功能,降低整车成本的同时,提升冗余控制的响应速度,并可以适用于大部分汽车,具有较高的实用性。
17.本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
18.本技术上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
19.图1为根据本技术实施例提供的一种电子驻车制动的冗余控制装置的方框流程;
20.图2为根据本技术实施例提供的电子驻车制动冗余控制逻辑电路图;
21.图3为根据本技术实施例提供的冗余控制方法流程图;
22.图4为根据本技术实施例提供的电子驻车制动的冗余控制系统的方框示意图;
23.图5为根据本技术实施例提供的电子驻车制动的冗余控制方法的流程图。
具体实施方式
24.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。
25.下面参考附图描述本技术实施例的电子驻车制动的冗余控制装置、系统、方法及介质。针对上述背景技术中提到的相关技术中非冗余电子驻车系统搭配p档机械结构导致成本较高及操作复杂,且非冗余电子驻车系统一旦故障无法保证车辆的行车安全等问题,本技术提供了一种电子驻车制动的冗余控制装置,在该装置中,第一驱动组件主要是用于驱动车辆的电子卡钳加紧或释放制动盘;第二驱动组件是用于接口或断开车辆的驻车制动系统和电子卡钳之间的连接,整车控制器在识别到驻车制动系统处于异常状态时临时接管电子驻车制动功能,控制第二驱动组件断开驻车制动系统与电子卡钳之间的连接,并在车辆满足驻车制动条件时,控制第一驱动组件驱动电子卡钳加紧制动盘,并在车辆启动时,控制第一驱动组件驱动电子卡钳释放制动盘,可以实现取消p档机械机构后基于整车控制的冗余电子驻车制动功能,保证车辆及时驻车,提升了用车的安全性、利于推广,并且降低了车辆制造成本。由此,解决了相关技术中非冗余电子驻车系统搭配p档机械结构导致成本较高及操作复杂,且非冗余电子驻车系统一旦故障无法保证车辆的行车安全等问题。
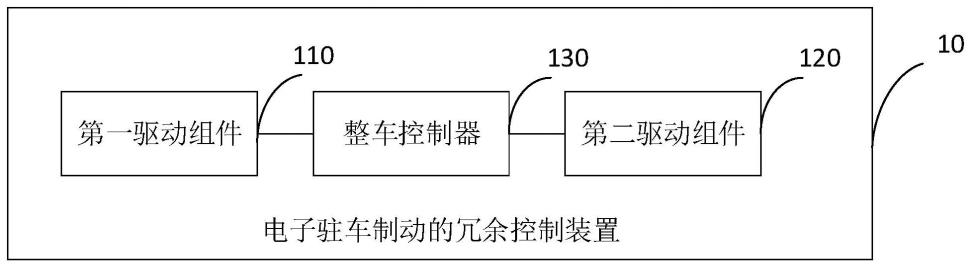
26.具体而言,图1为本技术实施例所提供的一种电子驻车制动的冗余控制装置的方框示意图。
27.如图1所示,该电子驻车制动的冗余控制装置10包括:第一驱动组件110、第二驱动组件120和整车控制器130。
28.其中,第一驱动组件110用于驱动车辆的电子卡钳夹紧或释放制动盘;第二驱动组件120用于接通或断开车辆的驻车制动系统与电子卡钳之间的连接;整车控制器130用于在识别到驻车制动系统处于预设异常状态时,控制第二驱动组件120断开驻车制动系统与电子卡钳之间的连接,并在车辆满足预设驻车制动条件时,控制第一驱动组件110驱动电子卡钳夹紧制动盘,并在车辆启动时,控制第一驱动组件110驱动电子卡钳释放制动盘。
29.其中,预设异常状态可以是整车控制器未收到来自驻车制动系统的can报文的状态,在此不做具体限定。
30.其中,预设驻车制动条件可以是车辆前方红绿灯处于红灯状态需停车等待,也可以是车辆需靠边临时停车等,可根据实际情况去判定是否满足驻车制动条件,在此不做具体限定。
31.其中,第一驱动组件110包括第一至第四继电器,第二驱动组件120包括第五和第六继电器。
32.其中,第一继电器和第四继电器为常开继电器,第二继电器和第三继电器双开继电器,第五继电器和第六继电器为常闭继电器。
33.其中,电子卡钳包括左电子卡钳和/或右电子卡钳。
34.可以理解的是,本技术实施例中第一驱动组件主要是用于驱动车辆的电子卡钳加紧或释放制动盘;第二驱动组件是用于接口或断开车辆的驻车制动系统和电子卡钳之间的连接,整车控制器在识别到驻车制动系统处于异常状态时临时接管电子驻车制动功能,控制第二驱动组件断开驻车制动系统与电子卡钳之间的连接,并在车辆满足驻车制动条件
时,控制第一驱动组件驱动电子卡钳加紧制动盘,并在车辆启动时,控制第一驱动组件驱动电子卡钳释放制动盘,可以实现取消p档机械机构后基于整车控制的冗余电子驻车制动功能,保证车辆及时驻车,提升了用车的安全性、利于推广,并且降低了车辆制造成本。
35.需要说明的是,本技术实施例通过车辆的电子驻车制动的冗余控制装置控制左电子卡钳进行工作就可以保证车辆平稳停止或启动;本领域技术人员还应理解的是本技术实施例还可以通过电子驻车制动的冗余控制装置设置一套装置同时控制两个电子卡钳,如在驻车制动系统正常状态下,第五和第六继电器同时可以控制右电子卡钳加紧或释放制动盘,在驻车制动系统异常状态下,第二继电器和第三继电器同时也可以控制右电子卡钳加紧或释放制动盘,从而保证在左右电子卡钳任意一个出现故障时也可以将车停止或是启动,保证车辆的安全性;或者设置两套装置控制两个卡钳,如通过再外加两个继电器硬线连接驻车制动系统和整车控制器来控制右电子卡钳加紧或释放制动盘,从而保证在左电子卡钳出现故障时通过右电子卡钳也可以将车停止或是启动,保证车辆的安全性,在此不做具体限定。
36.在本技术实施例中,第一至第四继电器,用于根据整车控制器输出的电平信号闭合或断开,其中,若第四继电器闭合,则第五继电器和第六继电器均断开,以断开驻车制动系统与电子卡钳之间的连接;若第四继电器断开,则第五继电器和第六继电器均闭合,以接通驻车制动系统与电子卡钳之间的连接。
37.可以理解的是,本技术实施例在车辆的驻车制动系统处于异常状态时,通过整车控制器输出的电平信号控制第一至第四继电器的闭合或断开,此时第四继电器闭合,则第五继电器和第六继电器均断开,以断开驻车制动系统与电子卡钳之间的连接,防止在整车控制器临时接管电子驻车制动功能时出现干扰;在车辆的驻车制动系统处于正常状态时,第四继电器断开,第五继电器和第六继电器均闭合,以接通驻车制动系统与电子卡钳之间的连接,保证在车辆停车或是启动状态下,控制电子卡钳加紧或是释放制动盘,保证车辆的安全行驶。
38.在本技术实施例中,整车控制器进一步用于在车辆满足预设驻车制动条件时,控制第一继电器和第三继电器闭合、第二继电器断开,以驱动电子卡钳的电机正传,夹紧制动盘;在车辆启动时,控制第一继电器和第二继电器闭合、第三继电器断开,以驱动电子卡钳的电机反转,释放制动盘。
39.可以理解的是,本技术实施例在车辆的驻车制动系统处于异常状态时,整车控制器临时接管电子驻车制动功能,此时整车控制器在车辆满足设定的驻车制动条件时,控制第一继电器和第三继电器闭合、第二继电器断开,以驱动电子卡钳的电机正传,夹紧制动盘;在车辆启动时,控制第一继电器和第二继电器闭合、第三继电器断开,以驱动电子卡钳的电机反转,释放制动盘,通过多种方式控制电子卡钳加紧或是释放制动盘,从而实现驻车功能,避免发生事故,保证车辆行驶的安全性。
40.需要说明的是,整车控制器在车辆满足设定的驻车制动条件时,作为一个具体实施例可以通过控制第一继电器和第三继电器闭合、第二继电器断开,以驱动电子卡钳的电机正传,夹紧制动盘;在车辆启动时,控制第一继电器和第二继电器闭合、第三继电器断开,以驱动电子卡钳的电机反转,释放制动盘;作为另一个实施例可以通过控制第一继电器和第二继电器闭合、第三继电器断开,以驱动电子卡钳的电机正传,夹紧制动盘;在车辆启动
时,控制第一继电器和第三继电器闭合、第二继电器断开,以驱动电子卡钳的电机反转,释放制动盘,可以根据开发人员的实际意愿设定整车控制器输出的电平信号用以控制相关继电器,在此不做具体限定。
41.在本技术实施例中,整车控制器进一步用于在未接收到驻车制动系统的can报文时,判定驻车制动系统处于预设异常状态,否则判定驻车制动系统处于正常状态。
42.可以理解的是,本技术实施例可以通过判断整车控制器是否接收到驻车制动系统的can报文来判断驻车制动系统是否处于异常状态,以便于后续根据驻车制动系统状态决定整车控制器是否需要临时接管电子驻车制动功能。
43.在本技术实施例中,若驻车制动系统处于正常状态,则整车控制器输出电平信号的引脚处于不工作状态,驻车制动系统与电子卡钳之间的连接接通。
44.可以理解的是,本技术实施例在驻车制动系统处于正常状态时,整车控制器输出电平信号的引脚处于不工作状态,驻车制动系统与电子卡钳之间处于连接接通状态,通过驻车制动系统控制电子卡钳在车辆处于不同状态下执行不同的动作,保证车辆的安全行驶。
45.根据本技术实施例提出的电子驻车制动的冗余控制装置,第一驱动组件主要是用于驱动车辆的电子卡钳加紧或释放制动盘;第二驱动组件是用于接口或断开车辆的驻车制动系统和电子卡钳之间的连接,整车控制器在识别到驻车制动系统处于异常状态时临时接管电子驻车制动功能,控制第二驱动组件断开驻车制动系统与电子卡钳之间的连接,并在车辆满足驻车制动条件时,控制第一驱动组件驱动电子卡钳加紧制动盘,并在车辆启动时,控制第一驱动组件驱动电子卡钳释放制动盘,可以实现取消p档机械机构后基于整车控制的冗余电子驻车制动功能,保证车辆及时驻车,提升了用车的安全性、利于推广,并且降低了车辆制造成本。由此,解决了相关技术中非冗余电子驻车系统搭配p档机械结构导致成本较高及操作复杂,且非冗余电子驻车系统一旦故障无法保证车辆的行车安全等问题。
46.下面将结合图2和图3对电子驻车制动的冗余控制装置进行详细阐述,其中,该装置包括整车控制器vcu、智能驻车制动系统ipb、左电子卡钳l-ec、右电子卡钳r-ec、继电器rly-1/rly-2/rly-3/rly-4/rly-5/rly-6,具体地:
47.整车控制器vcu与智能驻车制动系统ipb之间通过can总线连接,整车控制器vcu与继电器rly-1/rly-2/rly-3/rly-4/rly-5/rly-6之间通过信号硬线连接,继电器rly-2/rly-3/rly-5/rly-6与左电子卡钳l-ec通过功率硬线连接,继电器rly-5/rly-6与ipb通过功率硬线连接。
48.其中,整车控制器vcu接收智能驻车制动系统ipb的can报文信号,整车控制器控制继电器的闭合与断开,继电器rly-2/rly-3驱动电子卡钳的夹紧与释放,继电器rly-5/rly-6断开智能驻车制动系统ipb与左电子卡钳l-ec的硬连接。
49.具体工作逻辑如下:
50.(1)智能驻车制动系统ipb正常工作时,周期性发送can报文给整车控制器vcu,整车控制器vcu接收can报文并处于待命状态。
51.在车辆停车时,智能驻车制动系统ipb控制左电子卡钳l-ec和右电子卡钳r-ec电机正传夹紧制动盘,车辆启动时,控制左电子卡钳l-ec和右电子卡钳r-ec电机反转,释放制动盘。
52.(2)智能驻车制动系统ipb出现异常时,整车控制器vcu未收到智能驻车制动系统ipb的can报文,整车控制器vcu临时接管电子驻车制动功能,在车辆停车时,整车控制器vcu的电平信号引脚pa4输出高电平,常开继电器rly-4工作,控制常闭继电器rly-5/rly-6吸合,断开智能驻车制动系统ipb和左电子卡钳l-ec的硬连接;然后pa1输出低电平,控制继电器rly-1吸合,同时,pa2输出高电平,控制继电器rly-2吸合,控制左电子卡钳l-ec电机正传,夹紧制动盘,实现电子驻车功能;当车辆启动时,pa1输出低电平,控制继电器rly-1吸合,同时,pa3输出高电平,控制继电器rly-3吸合,左电子卡钳l-ec电机反转,释放制动盘,实现电子驻车解锁功能。
53.(3)当整车控制器vcu可以正常接收ipb的can报文时,整车控制器vcu退出电子驻车制动功能,且pa1/pa2/pa3/pa4恢复默认不工作状态,继电器rly-5/rly-6恢复常闭状态,智能驻车制动系统ipb正常工作,接管电子驻车制动功能。
54.其次参照附图描述根据本技术实施例提出的电子驻车制动的冗余控制系统。
55.图4是本技术实施例的电子驻车制动的冗余控制系统的方框示意图。
56.如图4所示,该电子驻车制动的冗余控制系统20包括:电子卡钳210、驻车制动系统220和电子驻车制动的冗余控制装置230。
57.其中,驻车制动系统220与电子卡钳210之间硬连接,用于控制电子卡钳210夹紧或释放制动盘;如上述实施例的电子驻车制动的冗余控制装置230用于在识别到驻车制动系统220处于预设异常状态时,控制第二驱动组件断开驻车制动系统220与电子卡钳210之间的连接,并在车辆满足预设驻车制动条件时,控制第一驱动组件驱动电子卡钳210夹紧制动盘,并在车辆启动时,控制第一驱动组件驱动电子卡钳210释放制动盘。
58.根据本技术实施例提出的电子驻车制动的冗余控制系统,整车控制器在识别到驻车制动系统处于异常状态时临时接管电子驻车制动功能,控制第二驱动组件断开驻车制动系统与电子卡钳之间的连接,并在车辆满足驻车制动条件时,控制第一驱动组件驱动电子卡钳加紧制动盘,并在车辆启动时,控制第一驱动组件驱动电子卡钳释放制动盘,可以实现取消p档机械机构后基于整车控制的冗余电子驻车制动功能,保证车辆及时驻车,提升了用车的安全性、利于推广,并且降低了车辆制造成本。由此,解决了相关技术中非冗余电子驻车系统搭配p档机械结构导致成本较高及操作复杂,且非冗余电子驻车系统一旦故障无法保证车辆的行车安全等问题。
59.其次参照附图描述根据本技术实施例提出的电子驻车制动的冗余控制方法。
60.图5是本技术实施例的电子驻车制动的冗余控制方法的方框示意图。
61.如图5所示,该电子驻车制动的冗余控制方法,方法应用于如上述实施例的电子驻车制动的冗余控制装置,包括以下步骤:
62.在步骤s101中,识别到驻车制动系统是否处于预设异常状态
63.在步骤s102中,若识别到驻车制动系统处于预设异常状态,则控制第二驱动组件断开驻车制动系统与电子卡钳之间的连接,并在车辆满足预设驻车制动条件时,控制第一驱动组件驱动电子卡钳夹紧制动盘,并在车辆启动时,控制第一驱动组件驱动电子卡钳释放制动盘。
64.根据本技术实施例提出的电子驻车制动的冗余控制方法,在识别到驻车制动系统处于异常状态时,整车控制器临时接管电子驻车制动功能,控制第二驱动组件断开驻车制
动系统与电子卡钳之间的连接,并在车辆满足驻车制动条件时,控制第一驱动组件驱动电子卡钳加紧制动盘,并在车辆启动时,控制第一驱动组件驱动电子卡钳释放制动盘,可以实现取消p档机械机构后基于整车控制的冗余电子驻车制动功能,保证车辆及时驻车,提升了用车的安全性、利于推广,并且降低了车辆制造成本。由此,解决了相关技术中非冗余电子驻车系统搭配p档机械结构导致成本较高及操作复杂,且非冗余电子驻车系统一旦故障无法保证车辆的行车安全等问题。
65.本技术实施例还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上的电子驻车制动的冗余控制方法。
66.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不是必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或n个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
67.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“n个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
68.流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更n个用于实现定制逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本技术的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本技术的实施例所属技术领域的技术人员所理解。
69.应当理解,本技术的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,n个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。如,如果用硬件来实现和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列,现场可编程门阵列等。
70.本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。