碰撞避免支援装置
1.本技术是2020年8月28日在中国专利局提交的名称为“碰撞避免支援装置”的专利申请202010882631.6的分案申请。
技术领域
2.本发明涉及实施自动制动控制来避免本车辆与障碍物碰撞的碰撞避免支援装置。
背景技术:
3.已知有在由相机传感器及雷达传感器等前方传感器检测到本车辆碰撞的可能性高的障碍物的情况下实施自动制动控制来避免本车辆与障碍物碰撞的碰撞避免支援装置。自动制动控制是以不需要驾驶员的制动器操作的方式使本车辆产生制动力而使本车辆以预定的减速度减速的控制。
4.有时,在实施着自动制动控制时,由驾驶员进行加速器踏板的踩踏操作。例如,日本特开2017-114430所提出的装置在预测为本车辆会与障碍物碰撞的情况下,实施自动制动控制,但在驾驶员的加速器操作量变得比预定值大的情况下,使驾驶员的加速器操作优先而解除自动制动控制(也就是说,禁止自动制动控制的实施)。由此,能够使本车辆以与加速器操作相应的加速度加速。以下,将解除自动制动控制而能够使本车辆以与加速器操作相应的加速度加速称作加速器超控(override)。
5.该装置构成为,在驾驶员进行着加速器操作的状态下检测到档位变更操作的情况下,推定为该加速器操作是由驾驶员的误操作引起的,不解除自动制动控制。因此,在该情况下,无法进行加速器超控。
6.另外,日本特开2012-121534所提出的装置判定驾驶员进行的操作是恰当的碰撞避免操作还是误操作,在判定为是恰当的碰撞避免操作的情况下不实施自动制动控制,在判定为是误操作的情况下实施自动制动控制。该装置在预测为本车辆会与障碍物碰撞的情况、加速器操作量比预定值大的情况或加速器操作速度比预定值大的情况下,判定为驾驶员的加速器操作是误操作,实施自动制动控制。
技术实现要素:
7.上述的所有装置都在推定为驾驶员的加速器操作是违反驾驶员的意图的操作(明明要踩踏制动器踏板却误将加速器踏板踩入的操作)的情况下,使得自动制动控制不被解除(也就是说,实施自动制动控制)。以下,将驾驶员弄错为制动器踏板而将加速器踏板踩入的操作称作误踩踏操作。
8.然而,关于驾驶员进行的加速器操作是通过驾驶员的想法而进行的操作还是误踩踏操作,难以准确地判定。
9.例如,日本特开2017-114430所提出的装置将伴随着档位变更操作的加速器踩踏操作判定为误踩踏操作,但即使在未进行档位变更操作的情况下,也可想象驾驶员误将加速器踏板大幅踩踏的情况。例如,在本车辆正在接近行人的状况下,通常,驾驶员不会大幅
踩踏加速器踏板,但在察觉行人延迟而忐忑不安的情况等下,可想象要踩踏制动器踏板但误将加速器踏板大幅踩踏的情况。在该情况下,由于不进行档位变更操作,所以加速器踩踏操作不被判定为误踩踏操作。因而,即使本来是应该实施碰撞避免用的自动制动控制的状况,也不实施自动制动控制。
10.例如,日本特开2012-121534所提出的装置在加速器操作量比预定值大的情况或加速器操作速度比预定值大的情况下,将加速器操作判定为误踩踏操作。但是,在驾驶员有意地将加速器踏板大幅或快速踏入的情况下,会判定为驾驶员的加速器操作是误踩踏操作,实施自动制动控制。例如,如图6所示,在驾驶员要赶超在本车辆c1的前方行驶的前行车辆c2而使本车辆c1进行了加速的情况下,有时,因在该过程中本车辆c1向前行车辆c2快速接近而判定为前行车辆c2是障碍物,实施自动制动控制。若自动制动控制开始,则无法进行加速器超控,因此无法以驾驶员期望的轨道使本车辆行驶。另外,可能会因自动制动控制的实施而导致后续车辆向本车辆过度接近。
11.本发明提供在合适的状况下实施自动制动控制的技术。
12.本发明的方案的碰撞避免支援装置具备:制动装置,使本车辆产生与驾驶员的制动器操作相应的制动力;障碍物检测单元,检测存在于本车辆的周围的障碍物;自动制动控制单元,在判定为所述本车辆与所述障碍物碰撞的可能性高的情况下,实施自动制动控制,该自动制动控制用于以不需要所述驾驶员的制动器操作的方式利用所述制动装置产生制动力从而避免所述本车辆与所述障碍物碰撞;及自动制动禁止单元,在判定为与所述驾驶员的加速器操作具有相关性的加速器操作指标值为操作阈值以上的情况下,禁止所述自动制动控制的实施,其中,所述碰撞避免支援装置具备:特定种类判定单元,判定所述障碍物的种类是否是预先设定的特定种类;及限制单元,在判定为所述障碍物的种类是所述特定种类的情况下,限制所述自动制动禁止单元的工作以使得所述自动制动禁止单元不禁止所述自动制动控制的实施。
13.碰撞避免支援装置具备制动装置、障碍物检测单元、自动制动控制单元及自动制动禁止单元。制动装置使本车辆产生与驾驶员的制动器操作相应的制动力(例如,要停止车轮的旋转的制动转矩)。例如,制动装置可以通过制动液压而产生与制动器操作相应的制动力。
14.障碍物检测单元检测存在于本车辆的周围的障碍物。
15.自动制动控制单元在判定为本车辆与障碍物碰撞的可能性高的情况下,实施自动制动控制,该自动制动控制用于以不需要驾驶员的制动器操作的方式利用制动装置产生制动力从而避免本车辆与障碍物碰撞。
16.自动制动禁止单元在判定为与驾驶员的加速器操作具有相关性的加速器操作指标值为操作阈值以上的情况下,禁止自动制动控制的实施。加速器操作指标值例如可以使用加速器操作量(例如,加速器开度)及加速器操作速度的至少一方。在由自动制动禁止单元禁止自动制动控制的实施的情况下,若是自动制动控制的实施中,则结束自动制动控制,则是未实施自动制动控制的状况,则禁止自动制动控制的开始。
17.因而,例如,在驾驶员要避开障碍物而有意地进行了大的加速器操作的情况下,不再实施自动制动控制,能够通过加速器超控而一边按照驾驶员的意图使本车辆加速一边进行碰撞避免。
18.不过,加速器操作未必按照驾驶员的意图进行。例如,若是本车辆正在向行人或自行车驾驶员等交通弱者接近的状况,则通常驾驶员不会进行大的加速器操作。因此,在这样的状况下检测到大的加速器操作的情况下,可以推定为驾驶员进行了误踩踏操作,禁止加速器超控。
19.于是,在本发明中,具备特定种类判定单元和限制单元。特定种类判定单元判定障碍物的种类是否是预先设定的特定种类。限制单元在判定为障碍物的种类是特定种类的情况下,限制自动制动禁止单元的工作(使自动制动禁止单元不工作)以使得自动制动禁止单元不禁止自动制动控制的实施。由此,不再禁止自动制动控制单元实施自动制动控制。
20.其结果,根据本发明,由于根据障碍物的种类来决定是否禁止自动制动控制的实施,所以能够在合适的状况下实施自动制动控制。
21.所述自动制动控制单元至少将行人、自行车及机动车作为设为所述自动制动控制的实施的对象的障碍物而识别,所述特定种类判定单元可以构成为,至少关于所述行人和所述自行车判定为是所述特定种类的障碍物,至少关于所述机动车判定为不是所述特定种类的障碍物。
22.根据该结构,自动制动控制单元至少将行人、自行车及机动车作为设为自动制动控制的实施的对象的障碍物而识别。
23.若是本车辆正在向行人或自行车接近的状况,则通常驾驶员不会进行大的加速器操作。另一方面,在本车辆正在向其它车辆接近的状况下,驾驶员有时会有意地进行大的加速器操作。例如,可想到驾驶员要赶超在本车辆的前方行驶的前行车辆而使本车辆加速的情况。在这样的情况中,有时,因在赶超过程中本车辆向前行车辆快速接近而判定为前行车辆是障碍物,开始自动制动控制。在该情况下,可能会因自动制动控制的实施而导致后续车辆向本车辆过度接近。
24.于是,特定种类判定单元至少关于行人和自行车判定为是特定种类的障碍物,至少关于机动车判定为不是特定种类的障碍物。在该情况下,“自行车”可以是驾驶员骑着的自行车,关于放置于路上的自行车(驾驶员没骑的自行车),可以不设为作为碰撞避免的对象的障碍物。
25.因而,在障碍物是行人或者自行车的情况下,不禁止自动制动控制的实施。也就是说,允许自动制动控制的实施。因此,在本车辆与行人或自行车碰撞的可能性高的情况下,即使驾驶员误将加速器踏板大幅踩踏,加速器操作也被设为无效,实施自动制动控制。由此,能够良好地进行碰撞避免支援。
26.另一方面,在障碍物是机动车的情况下,特定种类判定单元判定为该障碍物不是特定种类的障碍物。因而,在加速器操作指标值为操作阈值以上的情况下,禁止自动制动控制的实施。因此,能够进行加速器超控,驾驶员能够通过自身的操作来进行碰撞避免。
27.所述加速器操作可以是对所述本车辆的加速器踏板的操作。碰撞避免支援装置可以具备:重新踩踏判定单元,在所述自动制动控制的实施中判定是否进行了加速器踏板的重新踩踏操作;及重新踩踏时控制结束单元,在所述自动制动控制的实施中由所述重新踩踏判定单元判定为进行了所述加速器踏板的重新踩踏操作的情况下,使所述自动制动控制单元结束所述自动制动控制。
28.在自动制动控制的实施中驾驶员进行了加速器踏板的重新踩踏操作(将脚从踩踏
着的加速器踏板移开且之后再次踩踏加速器踏板的操作)的情况下,能够推定为该操作是按照驾驶员要使本车辆加速的想法而进行的操作。在该情况下,可以使得能够进行加速器超控。
29.于是,重新踩踏判定单元可以在自动制动控制的实施中判定为是否进行了加速器踏板的重新踩踏操作。重新踩踏时控制结束单元可以在自动制动控制的实施中由重新踩踏判定单元判定为进行了加速器踏板的重新踩踏操作的情况下,使自动制动控制单元结束自动制动控制。
30.因此,根据该结构,在驾驶员要使本车辆加速的状况下,能够使得不实施自动制动控制。
31.所述加速器操作是对所述本车辆的加速器踏板的操作,自动制动禁止单元可以构成为,取得所述驾驶员的加速器踏板操作量及加速器踏板操作速度作为所述加速器操作指标值,在第1条件及第2条件中的至少一方的条件成立的情况下,判定为所述加速器操作指标值为所述操作阈值以上,所述第1条件是所述加速器踏板操作量为第1操作量阈值以上,所述第2条件是所述加速器踏板操作量为小于所述第1操作量阈值的第2操作量阈值以上且所述加速器踏板操作速度为操作速度阈值以上。
32.根据该结构,能够合适地设定禁止自动制动控制的实施的加速器踏板操作条件。因而,能够减少因按照驾驶员自身的想法而进行的加速器踏板操作而实施自动制动控制的情况。
附图说明
33.本发明的示例性实施例的特征、优点及技术上和工业上的意义将会在下面参照附图来描述,在这些附图中,同样的标号表示同样的要素,其中:
34.图1是本发明的实施方式的碰撞避免支援装置的概略结构图。
35.图2是表示自动制动允许/禁止切换控制例程的流程图。
36.图3是表示自动制动允许/禁止切换控制例程的变形例1的流程图。
37.图4是表示自动制动允许/禁止切换控制例程的变形例2的流程图。
38.图5是表示自动制动允许/禁止切换控制例程的变形例3的流程图。
39.图6是表示本车辆要向前行车辆接近并赶超的状况的俯视图。
具体实施方式
40.以下,一边参照附图一边对本发明的实施方式的碰撞避免支援装置进行说明。
41.本发明的实施方式的碰撞避免支援装置应用于车辆(以下,为了与其它车辆区分而称作“本车辆”),如图1所示,具备驾驶支援ecu10、制动器ecu20、发动机ecu30及仪表ecu40。
42.这些ecu是具备微型计算机作为主要部分的电控制装置(electric control unit),经由未图示的can(controller area network:控制器局域网)而以能够相互发送及接收信息的方式连接。在本说明书中,微型计算机包括cpu、rom、ram、非易失性存储器及接口i/f等。cpu通过执行保存于rom的指示(程序、例程)来实现各种功能。这些ecu也可以几个或全部统合成一个ecu。
43.驾驶支援ecu10是进行驾驶员的驾驶支援的成为中枢的控制装置,实施碰撞避免支援控制。该碰撞避免支援控制是以下的控制:在本车辆的前方检测到障碍物的情况下,对驾驶员进行注意唤起,在碰撞的可能性进一步变高的情况下,通过自动制动控制来避免本车辆与障碍物的碰撞。碰撞避免支援控制一般被称作pcs控制(防撞安全控制),因此,以下将碰撞避免支援控制称作pcs控制。
44.驾驶支援ecu10连接于前方相机传感器50、前方雷达传感器60、车辆状态传感器70、操作状态传感器80及蜂鸣器90。
45.前方相机传感器50配设于车室内的前窗的上部,拍摄本车辆的前方的风景。前方相机传感器50基于拍摄到的图像来识别道路的白线及存在于本车辆的前方的立体物,将它们的信息(白线信息、立体物信息)以预定的周期向驾驶支援ecu10供给。白线信息是表示白线的形状及本车辆与白线的相对的位置关系等的信息。立体物信息是表示在本车辆的前方检测到的立体物的种类、立体物的大小及立体物相对于本车辆的相对的位置关系等的信息。此外,关于立体物的种类的识别,例如通过图案匹配等机器学习来实现。
46.前方雷达传感器60设置于车身的前中央部,检测存在于本车辆的前方区域的立体物。前方雷达传感器60放射毫米波段的电波(以下,称作“毫米波”),接收由存在于放射范围内的立体物(例如,其它车辆、行人、自行车、建造物等)反射出的毫米波(即,反射波)。前方雷达传感器60基于发送出的毫米波与接收到的反射波的相位差、反射波的衰减水平及从发送毫米波起到接收反射波为止的时间等来运算本车辆与立体物的距离、本车辆与立体物的相对速度、立体物相对于本车辆的相对位置(方向)等,将表示这些运算结果的信息(立体物信息)以预定的周期向驾驶支援ecu10供给。
47.驾驶支援ecu10将从前方相机传感器50供给的立体物信息和从前方雷达传感器60供给的立体物信息合成而取得精度高的立体物信息。
48.以下,将前方相机传感器50和前方雷达传感器60合起来称作前方传感器,将从前方相机传感器50及前方雷达传感器60得到的本车辆的前方的信息称作前方传感器信息。
49.车辆状态传感器70例如是检测车辆的行驶速度的车速传感器、检测车辆的前后方向的加速度的前后加速度传感器、检测车辆的横向的加速度的横向加速度传感器及检测车辆的横摆率的横摆率传感器等。
50.操作状态传感器80是检测驾驶员进行的操作的传感器或开关。操作状态传感器80是检测加速器踏板的操作量的加速器操作量传感器、检测制动器踏板的操作量的制动器操作量传感器、检测制动器踏板的操作的有无的制动器开关、检测转向角的转向角传感器、检测转向转矩的转向转矩传感器及检测变速器的档位的档位传感器等。
51.由车辆状态传感器70及操作状态传感器80检测到的信息(称作传感器信息)经由未图示的can而以预定的周期向驾驶支援ecu10供给。
52.蜂鸣器90按照来自驾驶支援ecu10的指示而鸣叫。驾驶支援ecu10在对驾驶员进行注意唤起的情况下,向蜂鸣器90发送鸣叫指令而使蜂鸣器90鸣叫。由此,能够进行向驾驶员的注意唤起。
53.制动器ecu20连接于制动致动器21。制动致动器21设置于通过制动器踏板的踏力来将工作油加压的未图示的主缸与设置于左右前后轮的摩擦制动器机构22之间的液压回路。摩擦制动器机构22具备固定于车轮的制动盘22a和固定于车身的制动钳22b。制动致动
器21根据来自制动器ecu20的指示而调整向内置于制动钳22b的轮缸供给的液压,通过利用该液压使轮缸工作而将制动衬块向制动盘22a压靠从而产生摩擦制动力。制动器ecu20基于由制动器操作量传感器检测到的制动器踏板的操作量来设定驾驶员要求减速度,以使本车辆以驾驶员要求减速度减速的方式控制制动致动器21的工作。另外,制动器ecu20在接收到从驾驶支援ecu10发送出的pcs制动器指令的情况下,以使本车辆以pcs制动器指令中包含的信息即pcs要求减速度减速的方式控制制动致动器21的工作。
54.此外,制动器ecu20在接收着pcs制动器指令且制动器踏板被操作的情况下,采用驾驶员要求减速度和pcs要求减速度中的绝对值更大的一方的要求减速度作为最终的要求减速度。制动器ecu20以使本车辆以最终的要求减速度减速的方式控制制动致动器21的工作。即,制动器ecu20实施制动器超控。
55.发动机ecu30连接于发动机致动器31。发动机致动器31是用于变更发动机32(内燃机)的运转状态的致动器,例如包括变更节气门的开度的节气门致动器。发动机ecu30基于由加速器操作量传感器检测到的加速器踏板操作量和由车速传感器检测到的车速来设定驾驶员要求转矩,以使发动机32输出驾驶员要求转矩的方式控制发动机致动器31的工作。另外,发动机ecu30在接收到从驾驶支援ecu10发送出的驱动力限制指令的情况下,以限制发动机32产生的输出转矩的方式控制发动机致动器31的工作。此外,在车辆是电动机动车的情况下,发动机致动器31是电动马达的驱动装置,在车辆是混合动力车辆的情况下,发动机致动器31是上述发动机致动器及电动马达的驱动装置。
56.仪表ecu40连接于显示器41及停止灯42。仪表ecu40能够按照来自驾驶支援ecu10的指示而使显示器41显示驾驶支援所涉及的显示。另外,仪表ecu40能够按照来自驾驶支援ecu10或制动器ecu20的指示而使停止灯42点亮。
57.《pcs控制》
58.接着,对pcs控制进行说明。驾驶支援ecu10若着眼于其功能,则具备碰撞判定部11、报知部12、自动制动控制部13、禁止部14、禁止限制部15及特定种类判定部16。
59.碰撞判定部11基于从前方传感器供给的前方传感器信息和由车辆状态传感器70检测的车辆状态来判定本车辆是否会与前方的立体物碰撞。例如,碰撞判定部11判定在立体物维持了现状的移动状态(在立体物是静止物的情况下是停止状态)且本车辆维持了现状的行驶状态的情况下本车辆与立体物碰撞的可能性是否高。碰撞判定部11在基于该判定结果而判定为本车辆与立体物碰撞的可能性高的情况下,将该立体物认定为障碍物。
60.不过,碰撞判定部11限定于立体物的种类是行人、自行车及机动车的情况而将它们设为碰撞避免的对象(自动制动控制的实施的对象)。该“自行车”是驾驶员骑着的自行车,不包括放置于路上的自行车(驾驶员没骑的自行车)。因此,前方相机传感器50只要能够关于存在于本车辆的前方的立体物中的至少行人、自行车及机动车以识别其种类的方式检测即可。
61.碰撞判定部11以这3个种类(行人、自行车及机动车)为对象,判定与本车辆碰撞的可能性是否高,在碰撞的可能性高的情况下将它们认定为障碍物。另一方面,关于与这3个种类不同的立体物,碰撞判定部11不设为碰撞避免的对象,因此不认定为障碍物。以下,将行人、自行车及机动车称作碰撞避免对象物。
62.更具体而言,碰撞判定部11在检测到障碍物的情况下,运算距离本车辆与障碍物
碰撞为止的预测时间即碰撞预测时间ttc。该碰撞预测时间ttc基于障碍物与本车辆之间的距离d和本车辆相对于障碍物的相对速度vr而通过下式(1)来运算。
63.ttc=d/vr
…
(1)
64.该碰撞预测时间ttc作为表示本车辆与障碍物碰撞的可能性的高低的指标来使用,其值越小,则本车辆与障碍物碰撞的可能性(危险性)越高。
65.在本实施方式中的pcs控制中,基于碰撞预测时间ttc,本车辆与障碍物碰撞的可能性的水平被划分为2个阶段,在初始的第1阶段中,报知部12使用蜂鸣器90及显示器41来向驾驶员提供警告。在本车辆与障碍物碰撞的可能性的水平变得比第1阶段高的第2阶段中,自动制动控制部13实施自动制动控制,进行碰撞避免支援。
66.在该情况下,碰撞判定部11在碰撞预测时间ttc下降至警报用阈值ttcw以下时,判定为本车辆与障碍物碰撞的可能性的水平到达了第1阶段。若碰撞预测时间ttc进一步下降而成为工作用阈值ttca(《ttcw)以下,则碰撞判定部11判定为本车辆与障碍物碰撞的可能性的水平到达了第2阶段。此外,报知部12不限于碰撞避免对象物,可以在检测到判定为与本车辆碰撞的可能性的水平到达了第1阶段的立体物的情况下,使蜂鸣器90及显示器41工作。
67.自动制动控制部13在判定为本车辆与障碍物(碰撞避免对象物)碰撞的可能性的水平到达了第2阶段的情况下,对制动器ecu20发送pcs制动器指令。该pcs制动器指令包括表示pcs要求减速度gpcs的信息。
68.pcs要求减速度gpcs能够如以下这样运算。例如,以障碍物处于停止的情况为例,若将当前时间点下的本车辆的速度(=相对速度)设为v,将本车辆的减速度设为a(《0),将距离车辆停止为止的时间设为t,则直到本车辆停止为止的行驶距离x能够利用下式(2)表示。
69.x=v
·
t (1/2)
·a·
t2…
(2)
70.另外,距离车辆停止为止的时间t能够利用下式(3)表示。
71.t=-v/a
…
(3)
72.因此,通过向(2)式的时间t代入由(3)式计算的时间t,直到本车辆停止为止的行驶距离x能够利用下式(4)表示。
73.x=-v2/2a
…
(4)
74.为了相对于障碍物在距离β跟前处使车辆停止,将该行驶距离x设定为从由前方传感器检测到的距离d减去距离β(》0)而得到的距离(d-β)来计算减速度a即可。此外,在障碍物正在行驶的情况下,将行驶距离x使用与障碍物的相对速度、相对减速度来计算即可。
75.对于pcs要求减速度gpcs,采用这样计算出的减速度a。此外,对pcs要求减速度gpcs设定有上限值gmax(》0),在运算出的pcs要求减速度gpcs的大小(绝对值)超过上限值gmax的情况下,pcs要求减速度gpcs的大小被设定为上限值gmax。
76.制动器ecu20在接收到pcs制动器指令时,以得到pcs要求减速度gpcs的方式控制制动致动器21。由此,能够以不需要驾驶员的制动器踏板操作的方式在左右前后轮产生摩擦制动力而强制性地使本车辆减速。
77.这样利用pcs制动器指令在左右前后轮产生摩擦制动力而使本车辆减速的控制是自动制动控制。
78.自动制动控制部13判定是否通过自动制动控制而碰撞预测时间ttc变得比结束阈值ttcb(被设定为比工作用阈值ttca大的值)大(ttc》ttcb)。也就是说,自动制动控制部13监视本车辆与障碍物的碰撞的可能性是否变低(是否成功避免了碰撞)。自动制动控制部13若判定为本车辆与障碍物的碰撞的可能性变低,则结束pcs制动器指令的发送。由此,自动制动控制结束,同时pcs控制结束。此外,结束阈值ttcb被设定为比工作用阈值ttca大的值。
79.或者,自动制动控制部13在通过自动制动控制而本车辆已停止的情况下,结束pcs制动器指令的发送。由此,自动制动控制结束。此外,自动制动控制部13在自动制动控制结束后的预定时间(例如,2秒钟),将停止保持指令向制动器ecu20发送。制动器ecu20在接收着停止保持指令的期间,控制制动致动器21,将为了停止保持用而设定的液压向左右前后轮的摩擦制动器机构22的轮缸供给。由此,本车辆的停止状态保持预定时间。pcs控制在本车辆的停止状态保持预定时间后结束。另外,制动器ecu20在自动制动控制的实施中及将本车辆保持为停止的期间,对仪表ecu40发送停止灯42的点亮指令。
80.自动制动控制部13在自动制动控制的实施中及将本车辆保持为停止状态的期间,对发动机ecu30发送用于限制发动机输出转矩(例如,使发动机输出转矩成为零)的驱动力限制指令。因此,即使在自动制动控制的实施中驾驶员进行加速器踏板操作,驾驶员要求转矩也被忽视,因此,本车辆不进行与加速器踏板操作相应的加速运动。
81.存在驾驶员识别障碍物而要通过自身的加速器操作来避免碰撞的情况。在这样的情况中,若实施自动制动控制,则驾驶员要求转矩被忽视,无法进行加速器超控。因而,无法以驾驶员意图的轨道使本车辆行驶。另一方面,在驾驶员误将加速器踏板踏入而本车辆向障碍物异常接近的情况下,需要禁止加速器超控而实施自动制动控制。
82.于是,驾驶支援ecu10为了能够根据状况而进行合适的加速器超控,也就是说,为了能够合适地限制自动制动控制的实施,具备禁止部14、禁止限制部15及特定种类判定部16。
83.禁止部14判定加速器操作量ap(加速器开度)是否为第1操作量阈值ap1以上,在判定为加速器操作量ap为第1操作量阈值ap1以上的情况下,对自动制动控制部13禁止自动制动控制的实施。自动制动控制部13在从实施自动制动控制之前起自动制动控制的实施被禁止的情况下(即,在ap为ap1以上的情况下),不开始自动制动控制。自动制动控制部13在自动制动控制的实施中自动制动控制的实施被禁止的情况下(即,在ap增大为ap1以上的情况下),在该时间点下结束自动制动控制。
84.因此,例如,如图6所示,在驾驶员为了赶超前行车辆c2而大幅踩踏了加速器踏板的情况下,即使本车辆c1向前行车辆c2快速接近,也不实施自动制动控制。因而,能够沿着驾驶员意图的轨道使本车辆c1行驶。
85.另一方面,若是本车辆正在向行人或自行车接近的状况,则通常驾驶员不会进行大的加速器操作。在这样的状况下检测到大的加速器操作量(加速器开度)的情况下,能够推定为该加速器操作是误踩踏操作。
86.于是,特定种类判定部16关于检测到的障碍物是“行人及自行车(驾驶员正在驾驶的自行车)的任一者”还是机动车进行区分。禁止限制部15在由特定种类判定部16判定为检测到的障碍物是“行人及自行车的任一者”的情况下,限制禁止部14的工作。由此,自动制动控制部13不被禁止自动制动控制的实施。因此,在障碍物是“行人及自行车的任一者”的情
况下,不管加速器操作量ap的大小如何,都由自动制动控制部13实施自动制动控制。其结果,加速器超控不被容许。
87.换言之,禁止限制部15在由特定种类判定部16判定为“检测到的障碍物是机动车”的情况下,不限制禁止部14的工作。由此,如上所述,禁止部14在判定为加速器操作量ap为第1操作量阈值ap1以上的情况下,对自动制动控制部13禁止自动制动控制的实施。其结果,加速器超控被容许。
88.《自动制动允许/禁止切换控制例程》
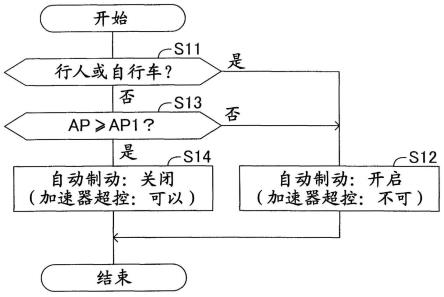
89.接着,对驾驶支援ecu10(相当于禁止部14、禁止限制部15及特定种类判定部16的功能部)实施的具体的自动制动允许/禁止切换处理进行说明。图2表示驾驶支援ecu10实施的自动制动允许/禁止切换控制例程。驾驶支援ecu10以预定的运算周期反复实施自动制动允许/禁止切换控制例程。以下,将自动制动允许/禁止切换控制例程称作切换控制例程。
90.切换控制例程在从以下的执行开始条件成立起到以下的执行结束条件成立为止的期间(执行期间)执行。
91.执行开始条件:执行开始条件是在判定为本车辆与障碍物碰撞的可能性高时(即,碰撞预测时间ttc到达工作用阈值ttca以下时)成立的条件。不过,如后所述,在由禁止部14禁止了自动制动控制的实施的情况下(参照s14),直到关于与该时间点的障碍物不同的障碍物的碰撞预测时间ttc到达工作用阈值ttca以下为止,执行开始条件不成立。
92.执行结束条件:执行结束条件是在判定为避免了本车辆与障碍物的碰撞时(即,碰撞预测时间ttc变得比结束阈值ttcb大时)和判定为本车辆已停止时中的任一较早的时间点下成立的条件。
93.当切换控制例程起动后,驾驶支援ecu10在步骤s11中判定碰撞避免对象物是否是“行人及自行车(驾驶员骑着的自行车)的任一者”。在碰撞避免对象物是“行人及自行车的任一者”的情况下(s11:是),驾驶支援ecu10使其处理进入步骤s12,实施自动制动控制。也就是说,通过禁止限制部15限制禁止部14的工作,自动制动控制的实施被允许。在该情况下,驾驶支援ecu10对制动器ecu20发送pcs制动器指令,并且对发动机ecu30发送驱动力限制指令。
94.由此,本车辆成为无法进行加速器超控的状态,以pcs要求减速度gpcs减速。因此,例如,即使在驾驶员进行了误踩踏操作的情况下,也能够使本车辆可靠地减速。
95.另一方面,在碰撞避免对象物既不是行人也不是自行车的情况下(s11:否),也就是说,在碰撞避免对象物是机动车的情况下,驾驶支援ecu10使其处理进入步骤s13。驾驶支援ecu10在步骤s13中读入加速器操作量传感器的检测信号,判定加速器操作量ap是否为第1操作量阈值ap1以上。加速器操作量ap例如是加速器开度(%)。在加速器操作量ap小于第1操作量阈值ap1的情况下(s13:否),使其处理进入步骤s12。因此,实施自动制动控制。
96.第1操作量阈值ap1被设定为能够视为加速器操作量ap非常大的值。
97.驾驶支援ecu10反复进行这样的处理,若本车辆与障碍物的碰撞被避免,或者,若本车辆停止,则结束切换控制例程。
98.在碰撞避免对象物是机动车的情况下,若在反复进行切换控制例程的中途加速器操作量ap成为第1操作量阈值ap1以上,或者,在切换控制例程的执行开始条件成立的时间点下加速器操作量ap为第1操作量阈值ap1以上的情况下,在步骤s13中判定为“是”。在该情
况下,驾驶支援ecu10使其处理进入步骤s14而不实施自动制动控制。也就是说,通过禁止限制部15不限制禁止部14的工作,由禁止部14禁止自动制动控制的实施。在该情况下,发动机32输出上述的驾驶员要求转矩。
99.例如,在碰撞避免对象物是机动车且在切换控制例程的执行开始条件成立的时间点下加速器操作量ap为第1操作量阈值ap1以上的情况下,驾驶支援ecu10不开始自动制动控制。因此,驾驶支援ecu10不对制动器ecu20发送pcs制动器指令,且不对发动机ecu30发送驱动力限制指令。
100.而且,在碰撞避免对象物是机动车且在切换控制例程的执行期间中加速器操作量ap成为了第1操作量阈值ap1以上的情况下,驾驶支援ecu10将到此为止实施的自动制动控制在该时间点下结束。因此,驾驶支援ecu10停止对制动器ecu20发送着的pcs制动器指令,并且停止对发动机ecu30发送着的驱动力限制指令。
101.由此,本车辆成为能够进行加速器超控的状态。因此,驾驶员能够一边利用加速器操作使本车辆加速一边进行碰撞避免。
102.如以上说明那样,根据本实施方式的碰撞避免支援装置,若碰撞避免对象物是“行人及自行车的任一者”,则与加速器操作量无关地实施自动制动控制(允许自动制动控制)。另一方面,若碰撞避免对象物是机动车,则在加速器操作量比第1操作量阈值大的情况下,禁止自动制动控制。因此,能够在合适的状况下实施自动制动控制。
103.例如,在本车辆正在接近“行人及自行车的任一者”的状况下,通常,驾驶员不会强烈踩踏加速器踏板,但在察觉“行人及自行车的任一者”延迟而忐忑不安的情况等下,可想到要踩踏制动器踏板但误将加速器踏板强烈踏入的情况。根据本实施方式,在这样的情况中,实施自动制动控制,无法进行加速器超控。由此,即使进行误踩踏操作,也能够合适地进行碰撞避免支援。
104.例如,在驾驶员要赶超在本车辆的前方行驶的前行车辆(其它机动车)而使本车辆进行了加速的情况下,可想到因在该过程中本车辆向前行车辆快速接近而判定为前行车辆是障碍物的情况。根据本实施方式,在碰撞避免对象物是机动车且进行了大的加速器操作的情况下,禁止自动制动控制的实施,能够进行加速器超控。因此,不会实施对于驾驶员而言不期望的自动制动控制,因此能够以驾驶员期望的轨道赶超前行车辆。另外,能够防止后续车辆向本车辆过度接近。
105.《变形例1》
106.接着,对切换控制例程的变形例1进行说明。图3表示变形例1的切换控制例程。该变形例1的切换控制例程是对实施方式的切换控制例程(图2)追加步骤s15的判定处理而得到的切换控制例程,其它处理与实施方式的切换控制例程相同。关于与实施方式的切换控制例程相同的处理,在附图中标注共通的步骤标号并省略说明。
107.驾驶支援ecu10在步骤s13中判定为加速器操作量ap小于第1操作量阈值ap1的情况下(s13:否),使其处理进入步骤s15。驾驶支援ecu10在步骤s15中判定是否加速器操作量ap为第2操作量阈值ap2以上且加速器操作速度as为操作速度阈值as1以上。第2操作量阈值ap2是比第1操作量阈值ap1小的值,但被设定为仅在进行了能够视为比较大的加速器操作的加速器操作的情况下加速器操作量ap会达到的值。加速器操作速度as是加速器操作量ap的每单位时间的变化量。操作速度阈值as1被设定为仅在进行了能够视为比较快的加速器
操作的加速器操作的情况下加速器操作速度as会达到的值。
108.因此,该步骤s15的处理是判定是否虽然加速器操作量ap小于第1操作量阈值ap1但进行了操作量比较大且操作速度比较快的加速器操作的处理。
109.驾驶支援ecu10在判定为加速器操作量ap为第2操作量阈值ap2以上且加速器操作速度as为操作速度阈值as1以上的情况下(s15:是),使其处理进入步骤s14,在没有如上述那样判定的情况下(s15:否),使其处理进入步骤s12。
110.因此,根据该变形例1,能够更合适地设定禁止自动制动控制的实施的加速器操作条件。因而,能够减少因通过驾驶员自身的想法而进行的加速器操作而实施自动制动控制的情况。
111.《变形例2》
112.接着,对切换控制例程的变形例2进行说明。图4表示变形例2的切换控制例程。该变形例2的切换控制例程是对实施方式的切换控制例程(图2)追加步骤s16的判定处理而得到的切换控制例程,其它处理与实施方式的切换控制例程相同。关于与实施方式的切换控制例程相同的处理,在附图中标注共通的步骤标号并省略说明。
113.在实施方式的切换控制例程中,在碰撞避免对象物是“行人及自行车的任一者”的情况下,必定实施自动制动控制。相对于此,在该变形例2中,在自动制动控制的实施中检测到驾驶员的有意的加速器操作的情况下,结束自动制动控制。
114.驾驶支援ecu10在步骤s11中判定为碰撞避免对象物是“行人及自行车的任一者”的情况下(s11:是),使其处理进入步骤s16。驾驶支援ecu10在步骤s16中判定是否进行了加速器踏板的重新踩踏操作。加速器踏板的重新踩踏操作是将脚从踩踏着的加速器踏板移开且之后再次踩踏加速器踏板的操作。该判定是关于是否存在在自动制动控制的实施中进行了加速器踏板的重新踩踏操作这一履历的判定。
115.驾驶支援ecu10读入加速器操作量传感器的检测信号来判定是否进行了加速器踏板的重新踩踏操作。例如,在加速器操作量(加速器开度)从能够视为踩踏着加速器踏板的值下降至能够视为未踩踏加速器踏板的值且之后增加至能够视为踩踏着加速器踏板的值的情况下,判定为进行了加速器踏板的重新踩踏操作。
116.加速器踏板的重新踩踏操作能够推定为驾驶员要使本车辆加速的有意的操作。在该情况下,优选能够进行加速器超控。于是,驾驶支援ecu10在判定为在自动制动控制中进行了加速器踏板的重新踩踏操作的情况下(s16:是),使其处理进入步骤s14。因此,自动制动控制结束。另外,能够进行加速器超控。由此,驾驶员能够通过自身的驾驶操作来进行碰撞避免。
117.此外,上述变形例2中的步骤s16的判定处理仅在碰撞避免对象物是“行人及自行车的任一者”的情况下实施。然而,也可以如图5所示的变形例3的切换控制例程那样,在碰撞避免对象物是机动车的情况下也实施步骤s16的判定处理。也就是说,在步骤s11中判定为“否”的情况及在步骤s13中判定为“否”的情况下都判定加速器踏板的重新踩踏操作的有无。并且,在判定为进行了加速器踏板的重新踩踏操作的情况下(s16:是),其处理进入步骤s14。
118.以上,虽然对本实施方式的碰撞避免支援装置进行了说明,但本发明不限定于上述实施方式,只要不脱离本发明的目的就能够进行各种变更。
119.例如,在本实施方式中,将碰撞避免对象物设为了行人、自行车(驾驶员骑着的自行车)及机动车,但未必限定为这3个种类。
120.而且,例如,也可以采用变形例1的切换控制例程与变形例2(或者变形例3)的切换控制例程组合而得到的例程。除此之外,图3的s13的判定也可以是加速器操作速度as是否为操作速度阈值as1以上的判定。
121.而且,例如,也可以将切换控制例程的步骤s11和步骤s13的顺序调换。也就是说,也可以先实施步骤s13的判定处理,在步骤s13中判定为“是”的情况下实施步骤s11的处理。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。