1.本实用新型涉及无人机技术领域,具体是指一种水空两栖无人机。
背景技术:
2.湿地具有地球上最重要的野生生态系统,具有巨大的环境调节功能和生态环境效益,同时湿地是当前减少最快的自然生态系统之一,针对湿地生态系统的各个组成部分变化趋势的观测体制逐渐成为当前备受关注的研究热点。当前多旋翼无人机在航拍、巡检、农业等领域发展较为成熟,而在湿地保护领域的潜力则有待开发。
3.传统的四旋翼结构较为固定,无法应对湿地的复杂生态环境;另一方面,传统无人机无防水式设计,不具有在水中的停泊和移动能力;现有水空两栖跨介质无人飞行器多为固定翼飞行器,其应对水空两栖环境也仅是在原有气动桨叶的基础上加装一到两组水动桨叶,结构冗余,不能适应湿地系统的复杂环境。
技术实现要素:
4.为解决现有技术中的不足,本实用新型提供一种水空两栖无人机,组成部件精简,无冗余部件,通过变形机构可实现飞行模式和停泊模式的切换,以更好地适应湿地系统的复杂环境。
5.本实用新型为实现上述目的,通过以下技术方案实现:一种水空两栖无人机,包括防水机体,防水机体上设置有摄像组件和控制器以及多个变形机构,变形机构的机臂外侧端设置有驱动部件,机臂的内侧端通过舵机与防水机体连接;控制器分别与舵机和驱动部件电性连接。
6.摄像组件设置在防水机体上,防水机体可对摄像组件起到保护作用,变形机构设置为四个,变形机构的机臂外侧端设置有用于驱动飞行升降的驱动部件,机臂的内侧端与舵机的输出端连接,舵机设置在防水机体上;飞行状态下,机臂外侧端的驱动部件设置在远离防水机体的一侧,无人机需要停泊在水面时,通过舵机带动机臂旋转,进而带动驱动部件向内侧移动,收拢在防水机体一侧,实现变形,组成部件精简,无冗余部件,降低了防水壳体总重量,以减少飞行所需的能量消耗;通过变形机构可实现飞行模式和停泊模式的切换,以更好地适应湿地系统的复杂环境;舵机控制机臂的旋转角度不同,使机臂和驱动部件呈不同角度分布在防水壳体四周。在一般飞行状态下,本实用新型的四轴机臂与传统四轴飞行器一致,间隔90
°
在防水壳体四周均匀分布;当遇到湿地环境下狭小空域或水域时,四轴机臂由位于防水壳体顶部的舵机带动,在一般飞行状态基础位置下,偏折30
°
向中轴靠拢以缩小防水壳体正截面;当本实用新型停泊在水面进入待机充能时,机臂四轴由舵机带动,在一般飞行状态基础位置下,逆时针偏折90
°
,将机臂四轴收缩至防水壳体腹部位置。
7.作为优选,防水机体包括上下依次连接的机壳和球形水面滑行底壳,机壳外侧与球形水面滑行底壳上表面连接处形成用于收纳变形机构的平台。
8.球形水面滑行底壳上表面的尺寸大于机壳,平台便于停泊在水面时对变形机构的
机臂和驱动部件进行收纳,防止水面水槽、树枝或其他障碍物对驱动部件的干扰。
9.作为优选,还包括设置在防水机体的顶板上的仿生隐蔽式机构,仿生隐蔽式机构包括球形顶盖、蜗轮蜗杆机构、以及通过蜗轮蜗杆机构转动设置在球形顶盖外侧的两个弧形壳体,球形顶盖设置在机壳上方,两个弧形壳体在转动后状态下形成围绕在球形顶盖与球形水面滑行底壳之间的环形壳体。
10.机臂和驱动部件收缩完成后,蜗轮蜗杆机构工作,通过蜗轮蜗杆啮合驱动将侧面翻盖降下,完成对防水壳体整体的生态隐藏,此时本实用新型从顶部和侧面看,为类似水面乌龟的仿生状,能有效地提高本发明的隐蔽性,降低对周围动物的干扰,有利于监测湿地动物行为任务的实现;上述过程的切换完全由程序自主控制,无需人为干预。
11.作为优选,蜗轮蜗杆机构包括驱动电机、蜗杆、啮合于蜗杆两侧的两个蜗轮以及两个皮带轮,驱动电机的输出轴与蜗杆连接,防护壳体与球形顶盖连接,蜗轮转动设置在防护壳体内,蜗轮一侧设置有轮槽,弧形壳体通过长轴转动设置在机壳上部,皮带轮设置在长轴中部,皮带轮与对应的蜗轮的轮槽通过皮带连接。
12.弧形壳体的两端通过长轴固定连接,长轴横向穿设在机壳的上部,长轴与机壳转动连接,长轴的中间穿设并固定有皮带轮,驱动电机固定在球形顶盖内,驱动电机的输出轴与蜗杆连接,两个蜗轮分别啮合在蜗杆的相对一侧,蜗轮一侧对应弧形壳体和长轴,两个蜗轮的一侧分别向外延伸设置有轮槽,轮槽与皮带轮相适配,一侧蜗轮的轮槽与下方相对应的一个皮带轮相对应设置,蜗轮的轮槽与皮带轮通过皮带传动,即驱动电机带动蜗杆旋转,蜗杆带动两侧的蜗轮向相反方向旋转,进而通过皮带带动长轴旋转,实现弧形壳体的转动。
13.作为优选,摄像组件设置在机壳上端面并位于球形顶盖内,球形顶盖开设有与摄像组件的摄像头相适配的摄像孔。
14.作为优选,舵机设置在机壳上,舵机的输出轴穿过机壳边缘与竖向设置的转轴连接,转轴的下端与机臂的内侧端连接。
15.作为优选,球形水面滑行底壳设置有椭球槽和楔状长条。
16.球形水面滑行底壳下底板设有椭球槽和楔状长条,符合船舶稳定式设计,能够应对中浪以下等级水面波动,大大提高了无人机停泊状态下的相对静稳定性,同时也为本发明从水面起飞减小阻力。
17.作为优选,控制器以及用于供控制器工作的电池均设置在机壳的空腔内,变形机构设置在平台与机壳上部之间。
18.作为优选,驱动部件包括无刷电机和旋翼,无刷电机用于驱动旋翼旋转,无刷电机与控制器电性连接。
19.机臂收缩完成后,通过无刷电机进一步的轻微运转,将可折叠桨叶收至贴近平台外侧。
20.对比现有技术,本实用新型的有益效果在于:无人机需要停泊在水面时,通过舵机带动机臂旋转,进而带动驱动部件向内侧移动,收拢在防水机体一侧,实现变形,组成部件精简,无冗余部件,降低了防水壳体总重量,以减少飞行所需的能量消耗;通过变形机构可实现飞行模式和停泊模式的切换,以更好地适应湿地系统的复杂环境;
21.机臂和驱动部件收缩完成后,驱动电机带动蜗杆旋转,蜗杆带动两侧的蜗轮向相反方向旋转,进而通过皮带带动长轴旋转,实现两个弧形壳体向外侧翻,完成对防水壳体整
体的生态隐藏,此时本实用新型从顶部和侧面看,为类似水面乌龟的仿生状,能有效地提高本发明的隐蔽性,降低对周围动物的干扰,有利于监测湿地动物行为任务的实现,上述过程的切换完全由程序自主控制,无需人为干预。
附图说明
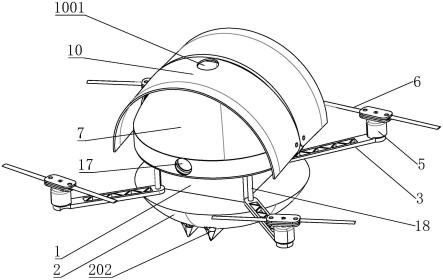
22.附图1为本实用新型第一立体结构示意图;
23.附图2为本实用新型内部结构示意图;
24.附图3为本实用新型仿生隐蔽式机构部分结构示意图;
25.附图4为本实用新型附图3中a处放大结构示意图;
26.附图5为本实用新型第二立体结构示意图。
27.附图中所示标号:1、机壳;101、上端面;102、外加强件;2、球形水面滑行底壳;201、椭球槽;202、楔状长条;3、机臂;4、舵机;5、无刷电机; 6、旋翼;7、球形顶盖;8、蜗轮;801、轮槽;9、蜗杆;10、弧形壳体;1001、摄像通孔;11、防护壳体;12、驱动电机;13、长轴;14、皮带轮;15、皮带; 16、摄像头;17、摄像孔;18、转轴;19、摄像安装卡槽。
具体实施方式
28.下面结合具体实施例,进一步阐述本实用新型,如图1~5所示,一种水空两栖无人机,包括防水机体和仿生隐蔽式机构,防水机体上设置有摄像组件和控制器以及多个变形机构,变形机构的机臂3外侧端设置有驱动部件,机臂3 的内侧端通过舵机4与防水机体连接;控制器分别与舵机4和驱动部件电性连接,驱动部件包括无刷电机5和旋翼6,无刷电机5用于驱动旋翼6旋转,无刷电机5与控制器电性连接。舵机4设置在机壳1上,舵机4的输出轴穿过机壳1 边缘与竖向设置的转轴18连接,转轴18的下端与机臂3的内侧端连接。
29.摄像组件通过摄像安装卡槽19固定设置在防水机体上,防水机体可对摄像组件起到保护作用,变形机构设置为四个,变形机构的机臂3外侧端设置有用于驱动飞行升降的驱动部件,机臂3的内侧端与舵机4的输出端连接;飞行状态下,机臂3外侧端的驱动部件设置在远离防水机体的一侧,无人机需要停泊在水面时,通过舵机4带动机臂3旋转,进而带动驱动部件向内侧移动,收拢在防水机体一侧,实现变形,组成部件精简,无冗余部件,降低了防水壳体总重量,以减少飞行所需的能量消耗;通过变形机构可实现飞行模式和停泊模式的切换,以更好地适应湿地系统的复杂环境;舵机4控制机臂3的旋转角度不同,使机臂3和驱动部件呈不同角度分布在防水壳体四周。在一般飞行状态下,本实用新型的四轴机臂3与传统四轴飞行器一致,间隔90
°
在防水壳体四周均匀分布;当遇到湿地环境下狭小空域或水域时,四轴机臂3由位于防水壳体顶部的舵机4带动,在一般飞行状态基础位置下,偏折30
°
向中轴靠拢以缩小防水壳体正截面;当本实用新型停泊在水面进入待机充能时,机臂3四轴由舵机4 带动,在一般飞行状态基础位置下,逆时针偏折90
°
,将机臂3四轴收缩至防水壳体腹部位置,机臂3收缩完成后,通过无刷电机5进一步的轻微运转,将可折叠桨叶收至贴近平台外侧。
30.控制器以及用于供控制器工作的电池均设置在机壳1的空腔内,变形机构设置在平台与机壳1上部之间。
31.防水机体包括上下依次连接的机壳1和球形水面滑行底壳2,机壳1的上端面101设
置有四个舵机4和摄像组件的摄像头16,机壳1的上端面101的下方与机壳1外侧设置有外加强件102,机壳1外侧与球形水面滑行底壳2上表面连接处形成用于收纳变形机构的平台。
32.球形水面滑行底壳2上表面的尺寸大于机壳1,平台便于停泊在水面时对变形机构的机臂3和驱动部件进行收纳,防止水面水槽、树枝或其他障碍物对驱动部件的干扰。
33.仿生隐蔽式机构设置在防水机体的顶板上,仿生隐蔽式机构包括球形顶盖 7、蜗轮蜗杆机构、以及通过蜗轮蜗杆机构转动设置在球形顶盖7外侧的两个弧形壳体10,球形顶盖7设置在机壳1上方,两个弧形壳体10在转动后状态下形成围绕在球形顶盖7与球形水面滑行底壳2之间的环形壳体。四个舵机4和摄像头16均位于球形顶盖7内。
34.机臂3和驱动部件收缩完成后,蜗轮蜗杆机构工作,通过蜗轮8蜗杆9啮合驱动将侧面翻盖降下,完成对防水壳体整体的生态隐藏,此时本实用新型从顶部和侧面看,为类似水面乌龟的仿生状,能有效地提高本发明的隐蔽性,降低对周围动物的干扰,有利于监测湿地动物行为任务的实现;上述过程的切换完全由程序自主控制,无需人为干预。
35.蜗轮蜗杆机构包括驱动电机12、蜗杆9、啮合于蜗杆9两侧的两个蜗轮8 以及两个皮带轮14,驱动电机12的输出轴与蜗杆9连接,防护壳体11与球形顶盖7连接,蜗轮8转动设置在防护壳体11内,蜗轮8一侧设置有轮槽801,弧形壳体10通过长轴13转动设置在机壳1上部,皮带轮14设置在长轴13中部,皮带轮14与对应的蜗轮8的轮槽801通过皮带15连接。
36.弧形壳体10的两端通过长轴13固定连接,长轴13横向穿设在机壳1的上部,长轴13与机壳1转动连接,长轴13的中间穿设并固定有皮带轮14,驱动电机12固定在球形顶盖7内,驱动电机12的输出轴与蜗杆9连接,两个蜗轮8 分别啮合在蜗杆9的相对一侧,蜗轮8一侧对应弧形壳体10和长轴13,两个蜗轮8的一侧分别向外延伸设置有轮槽801,轮槽801与皮带轮14相适配,一侧蜗轮8的轮槽801与下方相对应的一个皮带轮14相对应设置,蜗轮8的轮槽801 与皮带轮14通过皮带15传动,即驱动电机12带动蜗杆9旋转,蜗杆9带动两侧的蜗轮8向相反方向旋转,进而通过皮带15带动长轴13旋转,实现弧形壳体10的转动。
37.摄像组件设置在机壳1上端面101并位于球形顶盖7内,球形顶盖7开设有与摄像组件的摄像头16相适配的摄像孔17。与摄像孔17同一侧的翻转后的弧形壳体10,也设置有摄像通孔1001,摄像通孔1001与摄像孔17同轴线,摄像通孔1001与摄像孔17的直径相一致,用于无人机水面停泊时,摄像组件的正常使用。
38.球形水面滑行底壳2下底板设有椭球槽201和楔状长条202,符合船舶稳定式设计,能够应对中浪以下等级水面波动,大大提高了无人机停泊状态下的相对静稳定性,同时也为本发明从水面起飞减小阻力。
39.应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
