1.本技术涉及自移动机器人技术领域,尤其涉及一种配送机器人。
背景技术:
2.近年来随着人工智能技术的日益成熟,很多酒店餐厅纷纷在用餐环境中引进了自动配送机器人,提高了送餐服务的效率并增加收益。然而对于室外场景下的外卖送餐服务还是依赖传统的人工送餐。传统人工送餐除了增加了平台和商家的人工成本外,对于送餐人员而言,还存在潜在的交通意外风险。同时,送餐人员对环境的熟悉度以及送餐时所遭遇的天候变化(例如雨雪等恶劣天气)等,都会造成送餐效率及服务质量得不到保障问题。
技术实现要素:
3.本技术的多个方面提供一种配送机器人,能够自主导航和避障,实现自动取餐和送餐的功能,解决目前人工送餐存在的诸多问题。
4.本技术实施例提供一种配送机器人,包括车体、置物箱以及导航避障模块。所述车体包括底盘模块和多个行走装置。所述多个行走装置设置在所述底盘模块的底部,所述底盘模块的顶部具有承载平台。所述置物箱包括容器、箱门和开关装置。所述容器设置于所述承载平台上,所述箱门封闭所述容器的开口。所述开关装置连接于所述箱门,用以带动所述箱门相对所述容器活动,以封闭或开启所述开口。所述导航避障模块设置于所述底盘模块和/或所述置物箱上。所述导航避障模块包括多个传感器,所述多个传感器用以识别所述车体周遭的空间环境。
5.在本技术的一些实施例中,所述置物箱包括立起于所述承载平台上并邻设于所述容器的立柱,所述开关装置安装于所述立柱上。
6.在本技术的一些实施例中,所述多个传感器包括激光雷达,所述激光雷达设置在所述立柱的顶端,用以识别所述车体周遭的空间图像;和/或,所述多个传感器包括多个测距传感器,分别设置于所述底盘模块的前侧和后侧,用以识别所述车体前后方向上一预定距离内的障碍物;和/或,所述多个传感器还包括设置于所述置物箱前侧的第一视觉传感器以及分别设置于所述车体的左侧和右侧的第二视觉传感器和第三视觉传感器,所述第一视觉传感器用以识别所述预定距离外的障碍物,所述第二视觉传感器和所述第三视觉传感器分别用以识别位于所述左侧和所述右侧的障碍物。
7.在本技术的一些实施例中,所述承载平台设置有围边,且所述围边在所述承载平台上围绕形成容置空间,所述容器可拆卸的设置于所述容置空间内。
8.在本技术的一些实施例中,所述配送机器人还包括前壳与两侧盖。两所述侧盖分别遮盖于所述围边的两侧。所述前壳设置于所述承载平台的前端并且与两所述侧盖。所述围边在所述底盘模块的顶部结合为一整体,其中所述立柱被包覆于所述前壳内。
9.在本技术的一些实施例中,所述配送机器人还包括人机交互模块,设置于所述置物箱上。所述人机交互模块包括耦接于所述配送机器人的控制器的触摸屏和/或无线通信
单元,用以接收指令,并传送相对应的控制信号至所述控制器。
10.在本技术的一些实施例中,所述底盘模块包括底盘骨架结构,所述底盘骨架结构包括:外壳,所述外壳内形成有安装腔,所述安装腔具有朝上设置的第一开口,所述外壳还开设有第二开口,所述外壳为一体式结构;盖板,密封盖合所述第二开口,所述盖板与所述外壳为可拆卸连接;以及,主体架,由所述第一开口装入所述外壳内,并与所述外壳抵接固定,以支撑所述外壳。
11.在本技术的一些实施例中,所述主体架包括相连接的第一框架和第二框架,所述第一框架环绕所述第一开口设置,并与所述外壳的侧壁抵接;所述第二框架向下凸出地固定于所述第一框架,并与所述外壳的底壁抵接。
12.在本技术的一些实施例中,所述底盘模块包括电池仓门快拆结构,用于连接电池仓门和底盘本体,所述底盘本体设有用于容纳电池的容纳腔,所述容纳腔具有一安装口,所述电池仓门盖合所述安装口;其中,所述快拆结构包括:第一磁吸件,用于设置在所述电池仓门;第二磁吸件,用于设置在所述底盘本体;以及所述第一磁吸件与所述第二磁吸件磁吸连接,以使得所述电池仓门盖合所述安装口。
13.在本技术的一些实施例中,所述底盘模块包括电池快拆结构,分别连接电池和电池仓,所述电池仓具有容纳腔,所述容纳腔具有一安装口,所述电池安装于所述容纳腔内;其中,所述电池快拆结构包括:驱动部、第一卡接部和第二卡接部,所述第一卡接部固定于所述驱动部,所述驱动部活动连接于所述电池和所述电池仓中的一者,所述第二卡接部固定于所述电池和所述电池仓中的另一者,所述第一卡接部和所述第二卡接部其中一者为卡接凸起,另一者为卡接槽;以及所述第一卡接部能够与所述第二卡接部卡接,以限制所述电池从所述安装口脱离,且在所述驱动部的运动下,所述卡接凸起还能够向所述卡接槽的槽口滑动,以使所述电池能够从所述安装口脱离所述电池仓。
14.在本技术实施例中,配送机器人可通过导航避障模块实现自主导航和避障功能,并且配合能够自动开启和关闭的置物箱的设置,让配送机器人可以实现智能外卖取餐与送餐服务,相较于传统的人工送餐具有较高的可靠度和安全性,除了可降低人工成本外,还提升服务效率。
附图说明
15.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
16.图1为本技术实施例的配送机器人的分解图;
17.图2为本技术实施例的配送机器人的立体图;
18.图3为图2的正视图;
19.图4为图2的侧视图;
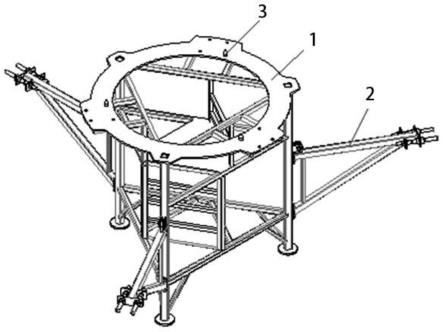
20.图5为本技术实施例中的一种底盘的结构示意图;
21.图6为图5中底盘从另一视角看的结构示意图;
22.图7为图5中底盘的骨架结构的结构示意图;
23.图8为图7中骨架结构从另一视角看的结构示意图;
24.图9为图7中主体架的结构示意图;
25.图10为图7中外壳的结构示意图;
26.图11为图5中底盘的另一结构示意图;
27.图12为图11中a处的放大图;
28.图13为图5中电池模组的结构示意图;
29.图14为图13中电池的结构示意图;
30.图15为图13中电池的另一结构示意图;
31.图16为图13中电池仓的结构示意图。
具体实施方式
32.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术具体实施例及相应的附图对本技术技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
33.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、商品或者设备中还存在另外的相同要素。
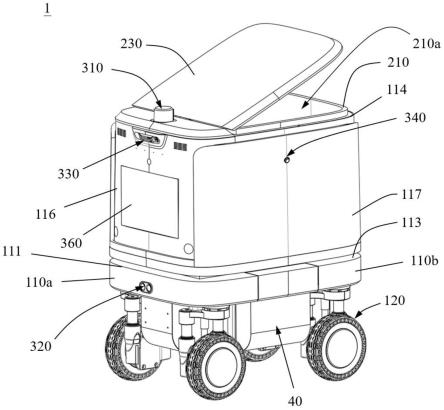
34.请参阅图1至图4,本技术实施例提供一种配送机器人1,包括车体10、置物箱20和导航避障模块30。车体10包括底盘模块110和多个行走装置120。底盘模块110具有可相互结合的载板111和底盘40。载板111的顶面设置有承载平台113。其中,在本技术的一些实施例中为了方便置物箱20的拆装,在承载平台113上还设置有围边114。围边114沿承载平台113的外周围环绕设置,并且在承载平台113上形成具有容置空间115的镂空结构。
35.此外,在本技术实施例中,底盘模块110上还设置有前壳116和/或多个壳板117,用以包覆所述底盘模块110上所设置的相关组件,以提供保护作用并维持外观结构的一致性与完整性。其中,前壳116在载板111的前端与围边114在底盘模块110的顶部结合为一整体。多个壳板117分别在载板111的尾端设置在围边的114的相对二侧,例如左侧和右侧,并且与前壳116的侧边对接而维持外观表面的平整性。
36.底盘40结合于载板111的底面,用以容纳电池和多个电气元件。并且,在载板111结合于底盘40时,在底盘40内形成隔绝水汽和灰尘的密闭空间,从而对这些电气组件提供防水、防尘和保护等作用。多个行走装置120可以是但不限于以成对的方式设置在底盘40的相对二侧,使多个行走装置120在底盘模块110的底部围绕于底盘40的四周。各个行走装置120包括支架组件121、缓冲组件122和驱动轮123。支架组件121包括上支架1211、下支架1212和转向模块1213。上支架1211连接于底盘40表面,并且设置有可摆动的盘体。转向模块1213包括法兰和转向执行器,其中法兰活动设置于上支架1211的盘体内,转向执行器固定于盘体上。转向执行器包括减速器和电机。减速器的输出轴与法兰连接,电机的输出轴连接于缓冲组件122上相对应的转轴,用以带动缓冲组件122转动。
37.缓冲组件122连接于上支架1211和下支架1212之间,其一端设置有上述的转轴,另一端设置有连接于下支架的阻尼器1221和带有弹性件的二缓冲器1222,其中二缓冲器1222
间隔排列,阻尼器1221介于二缓冲器1221之间。此外,下支架1212还设置有调节杆,其可以通过相对下支架1212转动的方式调节缓冲器1221的刚度以及阻尼器1222的伸缩杆伸出于缸体的距离,从而调整缓冲组件122整体的软硬度以提供适当的缓冲避震效果。
38.驱动轮123连接于支架组件121的下支架1212,用以支撑配送机器人1站立于工作区域上,并带动配送机器人1在取餐地点和送餐地点之间移动。其中,驱动轮123通过缓冲组件122提供垂直轴向的支撑力,让配送机器人1可以平稳的站立。并且,在配送机器人1执行送餐任务时,当遭遇到过坎、爬坡或过坑等具有高低差的越障工况时,通过缓冲器1221的缓冲作用以及阻尼器1222的吸震作用下,可以降低驱动轮123在垂直轴向的上下窜动幅度。因此,在驱动轮123接触障碍物的瞬间以及通过障碍物后,可以继续保持配送机器人1行走时的稳定度,并降低倾倒风险。
39.请参阅图1至图3。置物箱20包括容器210、开关装置220、箱门230和立柱240。立柱240立起于承载平台113上相邻于容器210的一侧,例如两者分别设置在承载平台113的前端和后端,并且彼此靠近。并且,容器210可拆卸的设置于承载平台113上由围边114所构成的容置空间115内。因此,相比于直接固定式的容器,本技术实施例通过围边的设置让容器可拆卸的安装于容置空间115中,便于定期或依据不同的使用需求将容器取出清洗、维护。例如,在配送机器人1上进行容器210的拆装、替换和维修保养等作业,例如拆下容器210进行清洗或替换具有保温效果的容器210等。其中,在本技术的一些实施例中,围边114远离承载平台113的一侧设置有台面1141,此台面1141沿围边设置而环绕于承载平台上方,并且沿围边的厚度方向延伸。同时,在容器210的开口210a的外周围环绕设置有凸缘211。因此,当容器210设置于容置空间115时,此凸缘211在投影方向上抵靠于台面1141上,避免容器210整个没入于容置空间115内而不易提取。
40.开关装置220连接于立柱240上,用以带动箱门230靠拢于容器210,并盖合于容器210上而封闭开口210a,或是从容器210上分离而露出开口210a。因此,在本技术实施例中,开关装置220可以是旋转电机、连动机构或电机与连动机构的组合等组件,用以带动箱门230相对容器210旋转摆动而开启或关闭容器210的开口210a。
41.请参阅图1至图4,导航避障模块30设置于底盘模块110上,其包括控制器和多个传感器。控制器设置于底盘模块110的底盘40内,多个传感器分布于车体10上的适当位置处,并且分别耦接于控制器。在本技术实施例中,多个传感器包括激光雷达310和多个测距传感器320。激光雷达310设置在立柱240的顶端,并且露出于前壳116,用以识别车体10周遭的空间图像,并传送相关数据至控制器,以创建立体空间地图、规划导航路径以及实现自主导航程序。多个测距传感器320可以是但不局限于设置在底盘模块110的前侧110a和后侧110b,其中前侧110a和后侧110b分别对应于配送机器人1前进方向的一侧和后退方向的一侧。测距传感器320可以是超声测距传感器、红外测距传感器、激光测距传感器或雷达测距传感器等,用以识别车体10行进方向上一预定距离内的障碍物。例如识别车体前方或后方3~5公尺内是否存在障碍物。
42.另外,在本技术的其他实施例中,测距传感器320还可以搭配其他形式传感器的协同作用,以对车体10的周遭环境以及在行驶路径上提供更全面的避障感测。例如,在车体10上设置第一视觉传感器330,其可以是但不限于以深度摄像头的形式设置在立柱240的前侧,并且露出于前壳116表面,用以识别车体10行进方向上较远距离的障碍物,例如预定距
离外的障碍物,从而与测距传感器形成互补作用。例如,配送机器人1可通过测距传感器320感测距离车体10较近且较矮的障碍物,而第一视觉传感器330可以感测距离车体10较远且较高的障碍物。因此,控制器可以根据第一视觉传感器330的感测结果规划预定行驶路径,并且在靠近障碍物时,根据测距传感器320的感测结果对预定行驶路径进行修正,从而避开障碍物;或者是根据感测结果判断障碍物的高度是否在容许范围内,若是,直接通过驱动轮123越过障碍物而不修正行驳路径。此时,通过缓冲组件122对驱动轮123起到的垂直轴向的支撑力和缓冲作用,让配送机器人1在越障后仍能稳定的行驶而不倾倒。
43.可以理解的是,在本技术的一些实施例中,还可以在车体10的左侧和右侧设置第二视觉传感器340和第三视觉传感器350,例如在围边114的左侧和右侧分别电性设置有摄像头。摄像头和内部走线容置于围边114和壳板117之间的空隙内,且摄像头的感测面露出于壳板117外,用以识别车体10左右两侧的障碍物,以判断与执行相应的避障程序。
44.此外,在本技术实施例中,车体10上还设置有人机交互模块,其可以是但不限于耦接于控制器的触摸屏360和/或设置于底盘40内的无线通信单元,用以接收指令,并传送相对应的控制信号至控制器,以进行取餐、送餐和开关箱门230等操作程序。
45.在本技术实施例的应用场景中,当用户在外卖平台下单后,商家的接单系统会发送信息指派最靠近商家的配送机器人到达商家处。此时,商家通过手机或触摸屏与配送机器人交互。配送机器人接收指令后通过开关装置自动开启箱门以露出容器。接着,商家将外卖放入配送机器人的容器内。待外卖放置妥当后,开关装置带动箱门封闭容器的开口。然后,配送机器人根据订单信息制定路线,自动导航到用户所在地。并且,在到达后通过后台给用户发送取餐信息。当用户来取餐时,通过人机交互模块发送指令开启箱门,让用户从容器将餐点取出,从而实现自动外卖送餐工作。
46.此外,为了可以实现配送机器人室内室外的通用性,同时也可以方便配送机器人内部零部件的维修和更换,在本技术另一些实施例所提供的配送机器人中,其底盘模块的底盘还包括底盘骨架结构。
47.请结合参考图5至图10。底盘骨架结构40a包括:
48.外壳410,外壳410内形成有安装腔,安装腔具有朝上设置的第一开口412,外壳410还开设有第二开口413,外壳410为一体式结构;
49.盖板420,密封盖合第二开口413,盖板420与外壳410为可拆卸连接;以及,
50.主体架430,由第一开口412装入外壳410内,并能够与外壳410抵接固定,以支撑外壳410。
51.外壳410为一体式结构包括以下情形:第一种情形,外壳410通过折弯或冲压或者是注塑等工艺一起成型。第二种情形,外壳410通过多个板件依次焊接形成一体结构。焊接的方式可以将各个壳体之间的连接处进行焊接密封,避免外壳410出现漏水的情况。示例性的,外壳410通过多个平直或弯折的板件依次焊接形成一体结构。
52.盖板420和外壳410可拆卸连接的方式也具有多种,例如盖板420与外壳410通过螺钉连接;或者,盖板420与外壳410通过卡扣和卡槽卡接。盖板420和外壳410可拆卸连接能够方便将盖板420和外壳410进行拆装,在需要对设置在外壳410内的零部件进行维修时,打开盖板420可以从外壳410的底部对零部件进行维修或更换。
53.可选地,外壳410和盖板420之间设有密封圈以密封第二开口413。密封圈可以是硅
胶圈、橡胶圈等具有弹性的密封件,该密封圈可以设置在第二开口413的孔壁,例如在第二开口413处设置密封环槽,密封圈部分嵌入密封环槽内。外壳410和盖板420密封连接后,可以避免第二开口413处漏水。
54.底盘40包括电池470、第一电气元件451、第二电气元件452以及底盘骨架结构40a;电池470、第一电气元件451、第二电气元件452均设置在安装腔内,且第一电气元件451和第二电气元件452对应第二开口413设置。
55.进一步地,底盘40还包括多个舵轮457,舵轮457即为底盘40的行走装置,舵轮457固定于外壳410的外侧,并沿外壳410的周向依次分布。可选地,底盘40包括四个舵轮457,四个舵轮457通过安装件安装在骨架结构40a的四角位置,每个舵轮457通过两个安装件安装。
56.本技术实施例中,外壳410和盖板420作为底盘40的外观结构件,外壳410本身采用一体式结构具有防水的效果,盖板420和外壳410之间为密封连接,同样可以避免盖板420和外壳410之间出现漏水现象。因此外壳410不需要再进行额外的防水设计,即可确保整个外观结构件不漏水,不会导致底盘40结构部分研发成本、加工成本、装配成本以及量产后相关的管理成本较高的问题。再者,外壳410设置第二开口413并利用盖板420可拆卸盖合该第二开口413,确保外壳410内部的零部件可以从底盘40顶部的第一开口412以及其它位置的第二开口413多个位置处进行维护,实现了整个底盘40的维护便利性。此外,主体架430作为结构加强件,对外壳410进行支撑,保证了整个底盘40的强度。
57.在本技术一些实施例中,安装腔包括沿水平方向分布的第一腔体414、第二腔体415和第三腔体416,第一腔体414用以容纳第一电气元件451,第二腔体415用以容纳电池470,第三腔体416用以容纳第二电气元件452。第一腔体414的底壁以及第三腔体416的底壁分别设有第二开口413。本实施例中,第一腔体414的底壁设置第二开口413,可以通过打开盖板420来对第一电气元件451维修或更换;同理,第二腔体415的底壁设置第二开口413,也可以通过打开相应的盖板420来对第二电气元件452维修或更换。具体的说,第一腔体414、第二腔体415和第三腔体416是沿底盘骨架结构40a的前后方向排列,从而利于底盘40形成长度大于宽度的结构形式。
58.当整个底盘40上部安装其他结构承受负载时,从底盘40上部对骨架结构40a内部的第一电气元件451和第二电气元件452进行维护时,因上部负载较重,零件较多,拆装费时。此时可通过拆除底部盖板420实现从底盘40下部将第一电气元件451和第二电气元件452整体抽出到底盘40外部进行维护,避免在逼仄的空间作业,大大提高底盘40维护便利性。
59.此外,将电池470放置在底盘40的中部,位于第一电气元件451和第二电气元件452之间,电池470的重量较大,放置在底盘40的中部可以更好保持底盘40的平稳性。
60.进一步地,外壳410的侧壁还设有第三开口417,第三开口417与第二腔体415连通,第三开口417用以供电池470进出。因此可以将电池470从第三开口417推入到第二腔体415内,且也可以将电池470从第三开口417抽出第二腔体415,方便对电池470进行更换。
61.进一步地,骨架结构40a还包括电池仓440,电池仓440位于第二腔体415,并与主体架430固定,电池仓440内形成有供电池470安装的容纳腔441,容纳腔441对应第三开口417设有安装口442,电池470可以从电池仓440中取出,以进行维护。
62.电池仓440和主体架430为分体式结构,便于各个零部件的单独加工。电池仓440与
主体架430之间可以采用连接件进行连接,连接件可以大体呈l形,其两个支臂分别连接电池仓440和主体架430,例如可以采用螺钉或者铆钉进行固定。
63.电池仓440的形状具体可以与电池470类似,例如对于方形的电池470,采用方形的电池仓440,对于圆形的电池470,采用圆筒形的电池仓440,以能够更加合理利用空间。
64.进一步地,骨架结构40a还包括电池仓门443,电池仓门443与外壳410可拆卸连接,并盖合安装口442。通过打开电池仓门443,便于对电池仓440内的电池470进行维护。
65.电池仓门443和外壳410可拆卸连接的方式具有多种,例如但不限于螺钉连接、卡扣卡接、磁铁磁吸等。根据此,请结合参考图11和图12,本技术实施例还提出一种电池仓门快拆结构,用于连接电池仓门443和底盘本体,底盘本体设有用于容纳电池470的容纳腔441(如图16所示),容纳腔441具有一安装口442,电池仓门443盖合安装口442。其中,底盘本体包括上述中的底盘骨架结构40a。
66.快拆结构包括:
67.第一磁吸件444,用于设置在电池仓门443;
68.第二磁吸件447,用于设置在底盘本体;在一些实施例中,第二磁吸件447设置在外壳410。
69.第一磁吸件444与第二磁吸件447磁吸连接,以使得电池仓门443盖合安装口442。
70.本技术实施例中,通过在电池仓440的安装口442处设置电池仓门443,可以对电池仓440内的电池470起到防护效果,避免电池470裸露在外受到损毁。而电池仓门443采用磁吸的方式与底盘本体连接,可以方便电池仓门443和底盘本体的拆装,利于对电池470进行维护。磁吸的方式,拆装简单,对位难度低。并且,本技术实施例中的机器人仅通过施加作用力于电池仓门443就能实现电池仓门443的快速打开,以显露出电池仓440的电池,对电池470进行迅速拆装,能够快速简单的实现电池470换电,以此能增加机器人例如移动机器人的续航及工作时间,大大提高了移动机器人的工作效率。
71.第一磁吸件444和第二磁吸件447可以是磁铁等具有磁性的部件,或者第一磁吸件444为金属件等能够被磁性吸附的部件。
72.在一些实施例中,第一磁吸件444通过第一紧固件与电池仓门443固定;和/或,第二磁吸件447通过第二紧固件与底盘本体固定。第一紧固件和第二紧固件可以是螺钉、螺栓、销钉等部件。当然其它实施例中,第一磁吸件444与电池仓门443可以采用焊接固定,第二磁吸件447与底盘本体也可以采用焊接固定。
73.进一步地,电池仓门443的侧缘设置有安装凸部445,第一磁吸件444与安装凸部445固定。可选地,第一磁吸件444通过第一紧固件与安装凸部445固定。该实施例中,电池仓门443可以与安装口442适配,即电池仓门443至少部分嵌入到安装口442内,电池仓门443的侧缘与安装口442的孔缘抵接贴合,也即电池仓门443和安装口442采用过盈配合或者过渡配合,以将安装口442完全封闭。因此设置安装凸部445后,安装凸部445侧向凸出在电池仓门443的侧缘,不会影响到电池仓门443和安装口442的配合。
74.可选地,第一磁吸件444和安装凸部445通过螺钉固定。具体而言,安装凸部445设置第一安装孔,第一磁吸件444设置第二安装孔,螺钉穿设于第一安装孔和第二安装孔,以将第一磁吸件444锁固于安装凸部445。
75.安装凸部445可以呈半圆柱形、椭圆柱形、方形或者三角形等形状。第一磁吸件444
的形状与安装凸部445的形状大体相同,第一磁吸件444的形状与安装凸部445的形状大体相同指的是,第一磁吸件444的截面形状与安装凸部445的截面形状基本相同。示例性的,安装凸部445和第一磁吸件444均呈非完整的圆形,例如呈大于二分之一且小于一的圆形。
76.此外,第二磁吸件447同样可以呈圆形、长方形、正方形或者三角形等。为了使得电池仓门443盖合在安装口442处时,第一磁吸件444能够较为容易与第二磁吸件447完全吸合,因此可选地,第二磁吸件447的磁吸表面大于第一磁吸件444的磁吸表面,即第一磁吸件444在第二磁吸件447上的正投影全部落在第二磁吸件447内,该第二磁吸件447大于第一磁吸件444,即使电池仓门443在对位时发生一定偏差,也可以确保第一磁吸件444能够与第二磁吸件447较好吸合。
77.可选地,第一磁吸件444与第二磁吸件447为面接触,两者接触面积较大,磁吸力较好。
78.可选地,电池仓门443的两相对侧分别设置有至少一个第一磁吸件444,每一个第一磁吸件444均对应设置一个第二磁吸件447。示例性的,电池仓门443的两相对侧分别设置两个第一磁吸件444,两个第一磁吸件444沿着电池仓门443的侧缘分布。例如以左右上下方向为例,电池仓门443的左右两侧分别设置两个第一磁吸件444,同一侧的两个第一磁吸件444沿上下方向分布,并分别靠近电池仓门443的上下两侧设置,从而使得电池仓门443可以被较好固定。当然,其它实施例中,电池仓门443的每一侧都可以设置一个或者多个第一磁吸件444。
79.进一步地,为了实现第一磁吸件444和第二磁吸件447的对位准确,该快拆结构还可以包括插接件448,插接件448与电池仓门443固定,底盘本体设有第一插孔,插接件448插设于第一插孔以定位电池仓门443。插接件448可以是插销、插柱、导向杆、螺柱等能够用于插入孔中的部件。可选地,第一插孔的贯通方向平行于第一磁吸件444和第二磁吸件447之间磁吸力的方向。即在一些具体实施方式中,第一插孔的贯通方向垂直于电池仓门443和外壳410,第一插孔的贯通方向沿着安装口442的开口方向。
80.进一步地,电池仓门443还设有固定凸部446,插接件448固定于固定凸部446。
81.请结合参考图11至图13,进一步地,快拆结构还包括门锁449,门锁449固定于电池仓门443,底盘本体设有锁孔40c,门锁449能够与锁孔40c锁紧或脱离。具体地,在一些实施例中,所述门锁449包括操作部4492以及由所述操作部4492驱使在竖直面内摆动的锁舌4491,所述锁孔40c呈水平延伸的长条状,操作部4492该锁孔40c沿上下方向贯通,所述锁舌4491摆动伸入或退出所述锁孔40c使所述电池仓门被锁定或解锁。操作部4492自身通过转动来驱使锁舌4491在竖直面内摆动。操作部4492可以是把手或者是钥匙,把手大体可以呈圆形,以供用户握持。锁舌4491可以呈长条状,且沿长度方向平行于竖直面。示例性的,当锁舌4491呈水平状态时,即锁舌4491沿水平方向延伸时,锁舌4491与锁孔40c脱离。当锁舌4491向上转动90
°
而呈竖直状态时,锁舌4491与锁孔40c锁紧,即锁舌4491伸入到锁孔40c,从而限制电池仓门向外脱离底盘本体。当将操作部4492朝反方向旋转预设角度例如90
°
后,锁舌4491可再次与锁孔40c脱离。
82.或者而言,其它实施例中,门锁449也可以是其它的结构,例如锁舌和锁孔40c采用弹性卡接的方式锁紧固定。
83.在一些实施例中,所述底盘本体具有位于所述安装口上方的凸出结构40b,该凸出
结构40b沿安装口的开口方向向外凸出,所述锁孔40c设于所述凸出结构40b上,并沿上下方向贯穿凸出结构40b,所述电池仓门443包括遮罩所述凸出结构40b的凸起部分4431,所述门锁449安装于所述凸起部分4431。即该电池仓门443的部分区域呈鼓包结构来形成凸起部分4431,以避让底盘本体上的凸出结构40b,同时也使得凸起部分4431内侧对应形成的凹槽与底盘本体上的凸出结构40b适配,实现一定的定位功能。
84.为了方便第一电气元件451和第二电气元件452的安装,进一步地,主体架430还设有第一安装板431和第二安装板432,第一安装板431和第二安装板432将安装腔分隔为第一腔体414、第二腔体415和第三腔体416,第一安装板431和第二安装板432之间的空间构成第二腔体415,第一安装板431用以供第一电气元件451安装,第二安装板432用以供第二电气元件452安装。可选地,第一安装板431和第二安装板432呈竖直设置,第一电气元件451可以通过螺钉或者卡扣固定在第一安装板431上,同样地,第二电气元件452也可以通过螺钉或者卡扣固定在第二安装板432上。将第一电气元件451固定在第一安装板431,第二电气元件452固定在第二安装板432,相当于两个电气元件的力作用在主体架430上,而不是外壳410,因此可以避免外壳410受力变形。
85.参照图7、图9,本技术一些实施例中,主体架430包括相连接的第一框架433和第二框架434,第一框架433环绕第一开口412设置,并与外壳410的侧壁抵接;第二框架434向下凸出地固定于第一框架433,并与外壳410的底壁抵接,第二框架434内形成用以供电池470放置的第二腔体415。本实施例中,第一框架433呈方形环状,将外壳410第一开口412处支撑,起到结构支撑的效果。第二框架434呈贯通设置,其贯通方向面向外壳410的第三开口417。例如第二框架434呈口字形,与外壳410的底壁抵接,对外壳410的底壁起到结构加强效果。第二框架434的其中一侧与外壳410之间形成第一腔体414,第二框架434的另一侧与外壳410之间则形成第三腔体416。由此,主体架430类似于方通结构。
86.可选地,外壳410与主体架430铆接,在外壳410的四周可以设置多个铆钉来与主体架430铆接,同时,在外壳410的底壁也可以设置多个铆钉来与主体架430铆接。此外,外壳410和主体架430之间也可以通过螺钉锁固或焊接固定。
87.进一步地,外壳410和主体架430安装固定好后,可以整体进行喷粉或者电泳等表面处理,以降低外观结构被雨水腐蚀的风险。外壳410和盖板420可以采用金属结构,例如铝蒙皮,内部主体架430同样可以采用金属件例如不锈钢或者铝,第一安装板431和第二安装板432分别与主体架430焊接成型或螺钉连接。
88.请再次结合参考图5和图7,外壳410包括相邻的第一侧壁418和第二侧壁419,第一侧壁418设有供电池470进出的第三开口417。底盘40还包括摄像头455,摄像头455设置在第二侧壁419;和/或,底盘40还包括航空插头456,航空插头456设置在第二侧壁419。可选地,第二侧壁419同时设有摄像头455和航空插头456。以方形外壳410为例,第一侧壁418和第二侧壁419均为方形侧壁,且两者相连,其中第二侧壁419位于底盘40的后方。
89.进一步地,底盘40还包括第三电气元件453和第四电气元件454,第三电气元件453和第四电气元件454设置在电池仓440背离安装口442的一侧。本实施例中,电池仓440的两相对侧均可以设置电池仓门443,其中一个电池仓门443将电池仓440的安装口442盖合,对电池470进行盖合。另一个电池仓门443则将第三电气元件453和第四电气元件454盖合。两个电池仓门443的具体连接方式可以参见上述实施例,此处不再赘述。
90.本技术中的底盘40通过采用焊接与铆接工艺实现底盘骨架结构40a与外观件的一体化,外壳410采用整体焊接后与内部的主体架430铆接,再整体进行喷粉或电泳等表面处理,可确保外观不漏水,无需额外的防水设计,同时减少零件数量与装配工时,降低各项成本。通过使用主体架430与外壳410,对结构合理设计,对空间进行合理分配与布局实现底盘40的维护方便性及轻量化设计,达到可以负载底盘40结构自重近二十倍的载荷。结构中部为电池仓440,前后为第一电气元件451和第二电气元件452安装空间,底盘40结构底部做可拆结构设计即盖板420,确保底盘40内部电气元件可从底盘40上部与下部两个方向进行维护。
91.采用该结构,主体结构采用三个主体部件即可实现(外壳410、盖板420和主体架430),大大减少了部件数量进而节省了研发、生产、装配等等各项成本,实现狭窄逼仄空间内电气元件的维护便利性,实现可以负载自重近二十倍的载荷且本体自重很轻的目标。
92.目前,在很多领域要求机器人拥有较长时间的工作和续航能力,对于移动机器人例如巡检机器人,送餐机器人等耗电量较大。然而,目前的机器人由于电池470能量密度有限,存在续航时间短充电时间长的问题,导致机器人实际工作时间短和工作效率较低。
93.针对此,请结合参考图13至图16,本技术实施例还提出一种电池快拆结构,电池快拆结构分别连接电池470和电池仓440,电池仓440具有容纳腔441,容纳腔441具有一开口,电池470安装于容纳腔441内;电池快拆结构包括:
94.驱动部461、第一卡接部462和第二卡接部463,第一卡接部462固定于驱动部461,驱动部461活动连接于电池470和电池仓440中的一者,第二卡接部463固定于电池470和电池仓440中的另一者,第一卡接部462和第二卡接部463其中一者为卡接凸起,另一者为卡接槽。第一卡接部462能够与第二卡接部463卡接,以限制电池470从安装口442脱离,且在驱动部461的运动下,卡接凸起还能够向卡接槽的槽口滑动,以使电池470能够从安装口442脱离电池仓440。
95.本技术实施例中,以驱动部461活动连接电池仓440为例,当驱动部461相对于电池仓440运动时,能够带动与之连接的第一卡接部462相对于第二卡接部463滑动,此时卡接凸起可以向卡接槽的槽口方向移动,以使得电池470可以从安装口442脱离电池仓440,电池470被取出用于维修或者更换。当将电池470想电池仓440内推动到位后,将驱动部461相对电池仓440朝相反方向移动,则驱动部461带动卡接凸起滑入卡接槽内,并使得卡接凸起最终与卡接槽卡接,限制电池470从安装口442移出。
96.本技术实施例中的机器人仅通过施加作用力于驱动部461就能实现电池470快拆的结构形式,结构简单,电池470拆装方便,能够快速简单的实现电池470换电,以此能增加机器人例如移动机器人的续航及工作时间,大大提高了移动机器人的工作效率。
97.上述中,驱动部461可以与电池仓440转动连接或者是滑动连接等。在一些实施例中,驱动部461转动连接于电池470和电池仓440中的一者。例如,驱动部461与电池470转动连接。
98.以转动连接为例,其仅通过旋转驱动部461就能够实现电池470快拆的结构形式,通过快速换电的方式解决移动机器人续航时间短充电时间长的问题,提高移动机器人的工作效率。
99.在一些实施例中,第一卡接部462为卡接凸起,第二卡接部463为卡接槽,槽口的方
向沿安装口442的方向。由此,卡接凸起移动到卡接槽的槽口时,可以拉动驱动部461直接将电池470从安装口442拉出,且卡接凸起也从卡接槽的槽口脱离。在一具体实施方式中,电池仓440靠近安装口442的位置设有卡接槽,卡接槽的槽口贯穿电池仓440具有安装口442的端面。
100.此外,第一卡接部462也可以是卡接槽,第二卡接部463为卡接凸起。另外,卡接槽的槽口也可以相对安装口442的开口方向呈相交设置。
101.在一些实施例中,卡接槽包括呈夹角或弧形设置的第一槽段4631和第二槽段4632,第一槽段4631具有相对的两个第一槽壁,第一槽壁的延伸方向与安装口442的方向相交;第二槽段4632具有槽口;卡接凸起能够与两个第一槽壁卡紧,以限制电池470从安装口442脱离。本实施例中,第一槽段4631的两个第一槽壁的延伸方向与安装口442的开口方向相交,如此在卡接凸起与第一槽壁抵接时,具有与安装口442的开口方向相交的抵接力,抵接力与安装口442的开口方向错开,从而可以避免卡接凸起从安装口442的开口方向脱离卡接槽。可选地,卡接槽呈四分之一圆弧形,第一槽段4631和第二槽段4632两者近似于垂直。圆弧形状的卡接槽可以更好与驱动部461的转动路径契合,使得卡接凸起在卡接槽中的滑动更加顺畅。
102.在一些实施例中,驱动部461呈类似于把手的形状,具体地,驱动部461包括第一连接段4611和两个第二连接段4612,两个第二连接段4612分设于第一连接段4611的两端,并朝同一方向延伸;两个第二连接段4612分别设置有第一卡接部462,且两个第二连接段4612分别活动连接于电池470的两相对侧。
103.具体地,电池470具有第一侧面和两个第二侧面472,两个第二侧面472相背离设置,第一侧面位于两个第二侧面472之间。第一连接段4611能够位于第一侧面所在的一侧,两个第二连接段4612对应与两个第二侧面472转动连接。在第二侧面472设有旋转轴,第二连接段4612设有旋转孔而与旋转轴转动连接。
104.为了更方便取出驱动部461,将驱动部461向外旋转,进一步地,电池470露出安装口442的一侧设有抠手槽473,抠手槽473还面向驱动部461设置。即抠手槽473还贯穿第一侧面以面向驱动部461,使得用户可以通过抠手槽473接触到驱动部461。
105.进一步地,电池470还可以设置让位槽474,让位槽474从第一侧面延伸至两个第二侧面472,让位槽474的形状大体与驱动部461适配,驱动部461可以转动至容纳于让位槽474,则抠手槽473连通第一侧面的让位槽474。
106.进一步地,电池快拆结构还包括卡接板464,卡接板464设有卡接槽;卡接板464用以固定于电池470或者电池仓440。在一具体实施例中,卡接板464固定在电池仓440,当卡接板464固定在电池仓440的外侧面时,电池仓440对应设置凹槽,凹槽的形状可以与卡接槽相同,从而使得卡接凸起能够从内向外穿出而与卡接槽配合。卡接板464的设置,可以提高卡接凸起与卡接槽配合的强度,减小甚至避免电池仓440变形。
107.进一步地,电池快拆结构还包括限位件465,限位件465用于可拆卸连接于电池470或者电池仓440;限位件465能够与驱动部461抵接,以限制驱动部461运动。当驱动部461位于让位槽474内后,限位件465抵接在驱动部461的外侧,限制驱动部461转动,从而可以确保卡接凸起与卡接槽卡接,防止电池470掉出。当需要取出电池470时,取下限位件465,使得驱动部461能够向外旋转打开。
108.可选地,限位件465设有插接部,插接部用以与电池470露出安装口442的一侧插接。或者其它实施例中,限位件465通过螺钉或者卡扣等与电池470固定。
109.在一些实施例中,限位件465为电插头,电插头分别电连接电池470和外部电元器件。电插头既可以作为驱动部461的限位件465,又可以作为电性连接结构,起到双重的作用,由此不需要针对驱动部461增设单独的限位件465,可以充分利用电池470本身的结构来实现限位功能,有利于控制成本的增加。
110.本技术实施例还提出一种电池模组,电池模组包括电池470、电池仓440以及电池快拆结构,电池470、电池仓440以及电池快拆结构的具体结构请参见上述实施例,此处不再赘述。
111.本技术实施例还提出一种机器人,机器人可以是移动式机器人或者其它类型的机器人,该机器人可以包括电池模组、底盘40等结构,电池模组和底盘40的具体结构也请参见上述实施例,此处不再赘述。
112.以上所述仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。