1.本技术涉及机器人技术领域,尤其涉及一种机器人在窄空间环境向下连续转角下行的方法。
背景技术:
2.有足机器人在户外使用较多,随着高层建筑的增多,在高层建筑内部使用的有足机器人也增多,用于消防、环境杀毒、餐饮服务等。常规的高层建筑内使用的有足机器人,一般是通过电梯上下的。当电梯不能使用,比如消防救援、电梯故障等情况,常规有足机器人就无法使用。需要能在楼梯上下的有足机器人,这就涉及有足机器人在窄空间环境向下连续转角下行。可见,需要一种机器人在窄空间环境向下连续转角下行的方法,实现下楼梯。
3.每楼层的楼梯有向上楼梯段和向下楼梯段。楼层的向上楼梯段经楼层平台到楼层的向下楼梯段。上楼层的向下楼梯段经楼梯过渡平台到下楼层的向上楼梯段。
技术实现要素:
4.本技术提供一种机器人在窄空间环境向下连续转角下行的方法,用以解决现有技术中怎样实现有足机器人在窄空间环境向上连续转角下行的技术问题。
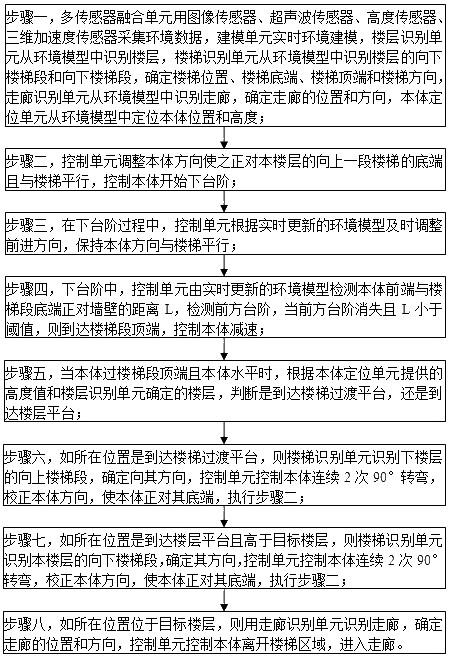
5.本技术采用下述技术方案:一种机器人在窄空间环境向下连续转角下行的方法,有足机器人包括多传感器融合单元、建模单元、楼层识别单元、楼梯识别单元、走廊识别单元、本体定位单元、控制单元,算法包括:步骤一,多传感器融合单元用图像传感器、超声波传感器、高度传感器、三维加速度传感器采集环境数据,建模单元实时环境建模,楼层识别单元从环境模型中识别楼层,楼梯识别单元从环境模型中识别楼层的向下楼梯段和向下楼梯段,确定楼梯位置、楼梯底端、楼梯顶端和楼梯方向,走廊识别单元从环境模型中识别走廊,确定走廊的位置和方向,本体定位单元从环境模型中定位本体位置和高度。
6.步骤二,控制单元调整本体方向使之正对本楼层的向下楼梯段的顶端且与楼梯平行,控制本体开始下台阶。
7.步骤三,在下台阶过程中,控制单元根据实时更新的环境模型及时调整前进方向,保持本体方向与楼梯平行。
8.步骤四,在下台阶过程中,控制单元根据实时更新的环境模型检测本体前端与楼梯段底端正对墙壁的距离l,检测前方台阶,当前方台阶消失且l小于阈值,则说明到达楼梯段底端,控制本体减速。
9.步骤五,当本体过楼梯段底端,本体水平时,根据本体定位单元提供的高度值和楼层识别单元确定的楼层,判断是到达楼梯过渡平台,还是到达楼层平台。
10.步骤六,如所在位置是到达楼梯过渡平台,则楼梯识别单元识别下楼层的向上楼梯段,确定其位置和方向,控制单元控制本体连续2次90
°
转弯,校正本体方向,使本体正对
其顶端,执行步骤二。
11.步骤七,如所在位置是到达楼层平台且高于目标楼层,则楼梯识别单元识别本楼层的向下楼梯段,确定其位置和方向,控制单元控制本体连续2次90
°
转弯,校正本体方向,使本体正对其顶端,执行步骤二。
12.步骤八,如所在位置位于目标楼层,则用走廊识别单元识别走廊,确定走廊的位置和方向,控制单元控制本体离开楼梯区域,进入走廊。
13.优选的,所述楼层识别单元从环境模型中识别楼层的方法,是根据图像传感器采集的环境场景中的楼层指示牌、楼层指示文字等内容进行图像识别得到所在楼层,或是根据高度传感器采集的本体高度值结合超声波传感器采集的各层空间距离值而计算得到所在楼层。
14.优选的,所述楼梯识别单元从环境模型中识别楼层的向上楼梯段的方法,是从环境模型中识别一组平行线在空间依次上升且都高于本体所在楼层地面。
15.优选的,所述楼梯识别单元从环境模型中识别楼层的向下楼梯段的方法,是从环境模型中识别一组平行线在空间依次下降且都低于本体所在楼层地面。
16.优选的,所述走廊识别单元从环境模型中识别走廊的方法,是先确定本体位于一段楼梯末端连接的楼层平台,然后用多传感器融合单元对楼层平台的空间进行测量和识别得到楼层平台的环境模型,然后识别出除楼梯外的水平出口,然后移动到水平出口,进一步得到本层的楼层平台外的环境模型,从中得到水平矩形区域,该水平矩形区域就是走廊。
17.有益效果:1)控制单元,根据环境模型、楼层位置、楼梯位置、楼梯底端、楼梯顶端、楼梯方向、走廊的位置、走廊的方向,控制本体加速、减速、转弯、匀速运动和停止,使之从本楼层的向下楼梯段的顶端,经楼梯过渡平台,经上楼层的向下楼梯段,到楼层平台。实现有足机器人在窄空间环境向下连续转角下行。
18.2)根据图像传感器采集的环境场景中的楼层指示牌、楼层指示文字等内容进行图像识别得到所在楼层,或是根据高度传感器采集的本体高度值结合超声波传感器采集的各层空间距离值而计算得到本体所在楼层。实现自动识别楼层。
19.3)从环境模型中识别一组平行线在空间依次上升且都高于本体所在楼层地面。实现自动从环境模型中识别楼层的向上楼梯段。
20.4)从环境模型中识别一组平行线在空间依次下降且都低于本体所在楼层地面。实现自动从环境模型中识别楼层的向下楼梯段。
21.5)先确定本体位于一段楼梯末端连接的楼层平台,然后用多传感器融合单元对楼层平台的空间进行测量和识别得到楼层平台的环境模型,然后识别出除楼梯外的水平出口,然后移动到水平出口,进一步得到本层的楼层平台外的环境模型,从中得到水平矩形区域,该水平矩形区域就是走廊。实现自动识别走廊。
附图说明
22.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
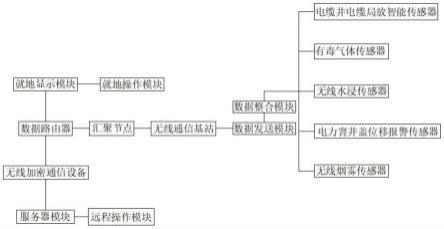
23.图1为本技术实施例的模块结构图。
24.图2为本技术实施例的算法流程图。
具体实施方式
25.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术具体实施例及相应的附图对本技术技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
26.一种机器人在窄空间环境向下连续转角下行的方法,有足机器人包括多传感器融合单元1、建模单元2、楼层识别单元3、楼梯识别单元4、走廊识别单元5、本体定位单元6、控制单元7,算法包括:步骤一,多传感器融合单元1用图像传感器、超声波传感器、高度传感器、三维加速度传感器采集环境数据,建模单元2实时环境建模,楼层识别单元3从环境模型中识别楼层,楼梯识别单元4从环境模型中识别楼层的向下楼梯段和向下楼梯段,确定楼梯位置、楼梯底端、楼梯顶端和楼梯方向,走廊识别单元5从环境模型中识别走廊,确定走廊的位置和方向,本体定位单元6从环境模型中定位本体位置和高度。
27.步骤二,控制单元7调整本体方向使之正对本楼层的向下楼梯段的顶端且与楼梯平行,控制本体开始下台阶。
28.步骤三,在下台阶过程中,控制单元7根据实时更新的环境模型及时调整前进方向,保持本体方向与楼梯平行。
29.步骤四,在下台阶过程中,控制单元7根据实时更新的环境模型检测本体前端与楼梯段底端正对墙壁的距离l,检测前方台阶,当前方台阶消失且l小于阈值,则说明到达楼梯段底端,控制本体减速。
30.步骤五,当本体过楼梯段底端,本体水平时,根据本体定位单元6提供的高度值和楼层识别单元3确定的楼层,判断是到达楼梯过渡平台,还是到达楼层平台。
31.步骤六,如所在位置是到达楼梯过渡平台,则楼梯识别单元4识别下楼层的向上楼梯段,确定其位置和方向,控制单元7控制本体连续2次90
°
转弯,校正本体方向,使本体正对其顶端,执行步骤二。
32.步骤七,如所在位置是到达楼层平台且高于目标楼层,则楼梯识别单元4识别本楼层的向下楼梯段,确定其位置和方向,控制单元7控制本体连续2次90
°
转弯,校正本体方向,使本体正对其顶端,执行步骤二。
33.步骤八,如所在位置位于目标楼层,则用走廊识别单元5识别走廊,确定走廊的位置和方向,控制单元7控制本体离开楼梯区域,进入走廊。
34.优选的,所述楼层识别单元3从环境模型中识别楼层的方法,是根据图像传感器采集的环境场景中的楼层指示牌、楼层指示文字等内容进行图像识别得到所在楼层,或是根据高度传感器采集的本体高度值结合超声波传感器采集的各层空间距离值而计算得到所在楼层。
35.优选的,所述楼梯识别单元4从环境模型中识别楼层的向上楼梯段的方法,是从环境模型中识别一组平行线在空间依次上升且都高于本体所在楼层地面。
36.优选的,所述楼梯识别单元4从环境模型中识别楼层的向下楼梯段的方法,是从环
境模型中识别一组平行线在空间依次下降且都低于本体所在楼层地面。
37.优选的,所述走廊识别单元5从环境模型中识别走廊的方法,是先确定本体位于一段楼梯末端连接的楼层平台,然后用多传感器融合单元1对楼层平台的空间进行测量和识别得到楼层平台的环境模型,然后识别出除楼梯外的水平出口,然后移动到水平出口,进一步得到本层的楼层平台外的环境模型,从中得到水平矩形区域,该水平矩形区域就是走廊。
38.有益效果:1)控制单元7,根据环境模型、楼层位置、楼梯位置、楼梯底端、楼梯顶端、楼梯方向、走廊的位置、走廊的方向,控制本体加速、减速、转弯、匀速运动和停止,使之从本楼层的向下楼梯段的顶端,经楼梯过渡平台,经上楼层的向下楼梯段,到楼层平台。实现有足机器人在窄空间环境向下连续转角下行。
39.2)根据图像传感器采集的环境场景中的楼层指示牌、楼层指示文字等内容进行图像识别得到所在楼层,或是根据高度传感器采集的本体高度值结合超声波传感器采集的各层空间距离值而计算得到本体所在楼层。实现自动识别楼层。
40.3)从环境模型中识别一组平行线在空间依次上升且都高于本体所在楼层地面。实现自动从环境模型中识别楼层的向上楼梯段。
41.4)从环境模型中识别一组平行线在空间依次下降且都低于本体所在楼层地面。实现自动从环境模型中识别楼层的向下楼梯段。
42.5)先确定本体位于一段楼梯末端连接的楼层平台,然后用多传感器融合单元1对楼层平台的空间进行测量和识别得到楼层平台的环境模型,然后识别出除楼梯外的水平出口,然后移动到水平出口,进一步得到本层的楼层平台外的环境模型,从中得到水平矩形区域,该水平矩形区域就是走廊。实现自动识别走廊。
43.以上仅为本技术的实施例而己,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。