1.本发明设计一种参数约束下的抗饱和时变队形协同控制方法,属于无人艇编队控制领域。
背景技术:
2.近年来,随着人们对海洋的探索不断深入,海洋作业环境逐渐复杂,水面无人艇协同编队控制因为其系统可靠性高、任务完成率高和机动灵活等特点受到学术界的广泛关注。与单艇相比,编队系统在情报侦察、海上安全和海上救援等方面有着突出优势,因此研究无人艇编队控制有着极高的现实意义。
3.考虑到在无人艇编队执行任务时往往会需要根据实际海域进行队形转换,例如在狭窄水域时需要编队以直线形式通过;而在执行救援任务时需要编队以扇形展开便于搜索,但是当前关于可变形编队的无人艇编队方法的成果很少,因此迫切地需要一种可以实现时变队形的无人艇编队方法。
4.在编队控制中为了保持队形,编队成员中往往会出现执行器输出过大的情况,因此执行器饱和问题不可忽视,当前抗饱和控制通常会引用辅助系统或者限幅滤波器,导致整个控制架构复杂化,因此我们通过设计一种参数约束控制输出,保证控制器具备抗饱和能力。
5.为了解决不确定性问题,大多编队控制器会使用自适应律,估计器,亦或者智能系统去拟合不确定参数,然后通过李亚普诺夫方式去证明整个闭环系统的稳定性。值得注意的是,当前的大多数研究仅能够保证闭环系统的最终一致有界性,而无法保证各艇的跟踪误差收敛至零。换句话说,目前大多无人艇编队控制方法在使用时,均存在稳态误差,且由于整个控制架构的复杂性,导致其难以额外引入其他辅助系统去消去该稳态误差。考虑至此,我们基于homogeneous定理设计编队控制器,不仅能保证闭环系统的有限时间收敛特性,且能使得跟踪误差最终收敛至零点,而非一个残差集。
技术实现要素:
6.本发明的目的是为了为了实现一种可时变变形的无人艇编队方法,通过设计时变编队控制器使得无人艇编队可随着时间改变队形以适应不同工况,并且通过设计控制器满足自身参数约束,实现了抗饱和的控制能力,相比于引入辅助系统等传统方法,简化了控制架构。在解决模型参数不确定的问题上,所设计的控制器具有优良的控制性能,可以保证跟踪误差最终收敛至零点,这是传统编队方法无法实现的。
7.本发明的目的是这样实现的:包括以下步骤:
8.步骤1:建立无人艇编队运动学动力学模型;
9.步骤2:对控制系统进行模型转换并确定控制目标;
10.步骤3:设计时变队形的抗饱和控制器;
11.步骤4:验证无人艇编队系统的有限时间稳定性和鲁棒性。
12.进一步地,在步骤1中建立无人艇编队运动学和动力学模型,如下所示:
13.首先每艘单艇的运动学模型如下所示:
[0014][0015]
其中ηi=[xi,yi,ψi]
t
表示无人艇在地球坐标系下的位置信息和偏航角;θi=[pi,vi,ri]
t
表示无人艇相对于本体坐标系下的线速度和角速度;ji(ψi)是坐标转换矩阵,定义如下:
[0016][0017]
定义每艘单艇的动力学模型如下所示:
[0018][0019]
其中代表惯性矩阵;表示科里奥利力和向心力的集合;表示阻尼矩阵;和是可知的名义参数项;δmi,δci(θi)和δdi(θi)是未知的参数项。代表外界干扰;ei=diag{e1,e2,e3}代表执行器效率矩阵; wi=[w
i1
,w
i2
,w
i3
]
t
表示命令控制信号;sat(wi)=[sat(w
i1
),sat(w
i2
),sat(w
i3
)]
t
代表控制实际控制信号, sat(
·
)定义如下:
[0020][0021]
其中代表每艘无人艇执行器信号的可接受的最大值。
[0022]
进一步地,在步骤2中对控制系统进行转换并确定控制目标,如下所示:
[0023]
将系统模型改写为欧拉-拉格朗日形式如下:
[0024][0025]
其中是不确定项的集合,表示饱和约束下转换后的控制输入,和的定义如下:
[0026][0027][0028][0029]
定义时变参数如下:
[0030][0031][0032]
其中作为时变参数可以实现无人艇编队进行队形转换。
[0033]
定义辅助变量为得到轨迹跟踪误差并确定控制目标如下:
[0034][0035]
进一步地,在步骤3中设计有限时间抗饱和控制器如下:
[0036]
选取积分滑模为:
[0037][0038]
其中ki和αi,i=1,2是正参数并且α1∈(0
,
1),α2=(1 α1)-1
2α1。
[0039]
通过假设无人艇编队中单艇速度θi满足有界条件其中为已知参数;并且外部干扰wi满足其中为未知参数;同时期望轨迹满足和时变参数满足设计有限时间抗饱和控制器如下:
[0040][0041][0042][0043][0044]
其中是为使系统稳定性设计的控制信号;和分别是为了克服不确定项和执行器容错误差而设计的辅助控制信号,其中ki,i=1,2,...,5为正控制参数,满足不等关系使得制器输出的控制信号受到参数约束,即实现自身抗饱和。
[0045]
设计自适应律如下:
[0046][0047][0048]
其中ρ和l是正参数;表示为其中e
i,min
表示无人艇编队中第i艘无人艇的执行器有效矩阵ei的最小特征值。
[0049]
进一步地,在步骤4中验证了无人艇编队系统的稳定性和鲁棒性:
[0050]
为了方便接下来的证明我们通过引入如下定义和定理:
[0051]
定义:对于函数在原点附近的开区间u0满足连续且满足则称f(ξ)为齐次函数并且称系统为齐次系统。
[0052]
定理:考虑如下系统:
[0053][0054]
其中f(ξ)为连续齐次矢量并且定义为
当ξ=0 为系统的渐近稳定平衡点且满足则可以得出上述系统可以在有限时间内全局收敛至ξ=0。
[0055]
通过选取通过选取和设计李雅普诺夫函数如下:
[0056][0057]
最终证明系统是全局有限时间收敛的。
[0058]
通过所设计的滑模面可以得出在经过有限时间后满足下式:
[0059][0060]
通过选取和得到如下系统:
[0061][0062][0063]
其中其中是的第三个元素。
[0064]
设计如下李雅普诺夫函数:
[0065][0066]
最终可以得到跟踪误差全局渐近稳定。
[0067]
通过设计和得到如下系统:
[0068][0069][0070]
设计如下李雅普诺夫函数:
[0071][0072]
最后可以证明跟踪误差有限时间内全局收敛到零点。
[0073]
与现有技术相比,本发明的有益效果是:本发明所设计的控制器可以根据设计的时变参数实现编队队形切换,且控制器由自身参数进行约束不需要约束系统,具有抗饱和
特性有效简化了控制架构,在外界干扰、模型参数不确定的情况下实现有限时间轨迹跟踪并且具有强鲁棒性。
附图说明
[0074]
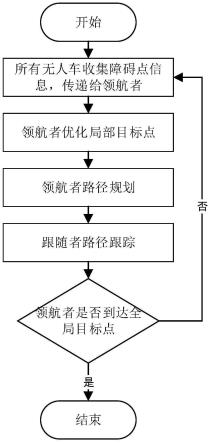
图1是本发明中无人艇编队有限时间无饱和容错控制器方法的流程图;
[0075]
图2(a)是无人艇的时变轨迹图,图2(b)、图2(c)是编队轨迹的部分放大图;
[0076]
图3(a)、图3(b)、图3(c)是为跟踪误差的时间响应图,图3(d)、图3(e)、图3(f)是控制信号响应图;
[0077]
图4(a)、图4(b)为自适应律的时间响应图。
具体实施方式
[0078]
下面结合附图与具体实施方式对本发明作进一步详细描述。
[0079]
结合本发明的附图,本发明的主要步骤如下:
[0080]
第一步,建立无人艇编队运动学和动力学模型,如下所示:
[0081]
首先每艘单艇的运动学模型如下所示:
[0082][0083]
其中ηi=[xi,yi,ψi]
t
表示无人艇在地球坐标系下的位置信息和偏航角;θi=[pi,vi,ri]
t
表示无人艇相对于本体坐标系下的线速度和角速度;ji(ψi)是坐标转换矩阵,定义如下:
[0084][0085]
定义每艘单艇的动力学模型如下所示:
[0086][0087]
其中代表惯性矩阵;表示科里奥利力和向心力的集合;表示阻尼矩阵;和是可知的名义参数项;δmi,δci(θi)和δdi(θi)是未知的参数项。代表外界干扰;ei=diag{e1,e2,e3}代表执行器效率矩阵; wi=[w
i1
,w
i2
,w
i3
]
t
表示命令控制信号;sat(wi)=[sat(w
i1
),sat(w
i2
),sat(w
i3
)]
t
代表控制实际控制信号, sat(
·
)定义如下:
[0088][0089]
其中代表每艘无人艇执行器信号的可接受的最大值。
[0090]
第二步,对控制系统进行模型转换并确定控制目标,如下所示:
[0091]
将系统模型改写为欧拉-拉格朗日形式如下:
[0092][0093]
其中是不确定项的集合,表示饱和约束下转换后的控制输入,和的定义如下:
[0094][0095][0096][0097]
定义时变参数如下:
[0098][0099][0100]
其中作为时变参数可以实现无人艇编队进行队形转换。
[0101]
定义辅助变量为得到轨迹跟踪误差并确定控制目标如下:
[0102][0103]
第三步,设计时变队形抗饱和控制器如下:
[0104]
选取积分滑模为:
[0105][0106]
其中ki和αi,i=1,2是正参数并且α1∈(0
,
1),α2=(1 α1)-1
2α1。
[0107]
通过假设无人艇编队中单艇速度θi满足有界条件其中为已知参数;并且外部干扰wi满足其中为未知参数;同时期望轨迹满足和时变参数满足设计有限时间抗饱和控制器如下:
[0108][0109][0110][0111][0112]
其中是为使系统稳定性设计的控制信号;和分别是为了克服不确定项和执行器容错误差而设计的辅助控制信号,其中ki,i=1,2,...,5为正控制参数,满足不等关系使得制器输出的控制信号受到参数约束,即实现自身抗饱和。
[0113]
设计自适应律如下:
[0114][0115]
[0116]
其中ρ和l是正参数;表示为其中e
i,min
表示无人艇编队中第i艘无人艇的执行器有效矩阵ei的最小特征值。
[0117]
第四步,验证无人艇编队系统的稳定性和鲁棒性:
[0118]
为了方便接下来的证明我们通过引入如下定义和定理:
[0119]
定义:对于函数在原点附近的开区间u0满足连续且满足则称f(ξ)为齐次函数并且称系统为齐次系统。
[0120]
定理:考虑如下系统:
[0121][0122]
其中f(ξ)为连续齐次矢量并且定义为当ξ=0 为系统的渐近稳定平衡点且满足则可以得出上述系统可以在有限时间内全局收敛至ξ=0。
[0123]
通过选取通过选取和设计李雅普诺夫函数如下:
[0124][0125]
最终证明系统是全局有限时间收敛的。
[0126]
通过所设计的滑模面可以得出在经过有限时间后满足下式:
[0127][0128]
通过选取和得到如下系统:
[0129][0130][0131]
其中其中是的第三个元素。
[0132]
设计如下李雅普诺夫函数:
[0133][0134]
最终可以得到跟踪误差全局渐近稳定。
[0135]
通过设计和得到如下系统:
[0136][0137][0138]
设计如下李雅普诺夫函数:
[0139][0140]
最后可以证明跟踪误差有限时间内全局收敛到零点。
[0141]
接下来将通过仿真实例对上述控制器的性能进行展示和验证。
[0142]
无人艇的模型参数如表1所示:
[0143]
表1
[0144][0145]
表中未列出的所有流体力学参数均假定为零,控制信号的幅值限制设置为控制器的增益如表2所示:
[0146]
表2
[0147][0148]
外部扰动设计为:
[0149][0150]
驱动有效矩阵设计如下:
[0151][0152]
无人艇编队的期望轨迹和初始状态如表3所示:
[0153]
表3
[0154][0155]
无人艇编队的时变控制参数如表4所示:
[0156]
表4
[0157][0158]
详细仿真结果如图2-6所示。图2(a)-(d)为无人艇编队轨迹跟踪图和放大的效果图,图2(b) 可以看出四艘无人艇可以一开始呈矩形队形;图2(c)可以看出无人艇队形实现从矩形转变为直线队形通过狭窄水域;图2(d)可以看出通过狭窄水域后无人艇队形转变为三角形队形,实现了时变编队控制。图3(a)-(c)为跟踪误差图,可以看出在参数不确定和执行器故障的情况下跟踪误差仍然可以稳定到零,并且在任务切换的情况下在有限时间内实现轨迹跟踪;图3(d)-(f) 为控制信号图,可以看出在控制器故障干扰下进行队形切换时控制输出可以迅速做出响应并且具有抗饱和特性。图4为自适应图,可以看出辅助系统可以有效抑制跟踪误差的变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。