1.本公开涉及移动靶车技术领域,尤其涉及一种移动靶车以及基于退役履带装甲车的遥控移动靶车。
背景技术:
2.目前,我国退役装备数量大、种类多,这些退役装备专库存储、专人值守,占用较多资源。如何处理退役装备,发挥出退役装备的最大价值,释放被其占用的资源是一个亟待解决的问题。
3.另外,长期以来,“靶场思维”盛行,实弹演习打击的目标多以土堆、固定靶标、白灰圈等固定假目标为主,战场仿真程度弱,战士融入感不强,射击训练效果不理想。如何营造逼真的战场环境,提升射击移动靶的水平,打造“装备蓝军”,也是亟待解决的问题。
4.移动靶车是一种“打废即弃”的装备,研制全新的运动靶标,时间周期长,成本高。现有的无人驾驶车辆的实现方式是采用自动控制体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,在国防和国民经济领域具有广阔的应用前景,但是目前使用的无人驾驶车辆都很难从人员驾驶和机器驾驶这两种模式中进行快速切换,这就导致在某些运输路段,无法使用远程操控机器驾驶车辆时,切换成人员驾驶模式困难,需要重新花费大量的时间精力对车上设备进行拆装和重组,影响整个运输过程的效率。
技术实现要素:
5.为了解决上述技术问题,本公开提供了一种移动靶车以及基于退役履带装甲车的遥控移动靶车。
6.第一方面,本公开提供了一种移动靶车,包括:控制器、供油模块、加速模块、制动模块、离合器控制模块和挡位控制模块;
7.所述供油模块、所述加速模块、所述制动模块、所述离合器控制模块和所述挡位控制模块均与所述控制器电连接;
8.所述供油模块可拆卸安装在所述移动靶车的车体和油泵阀柄之间;
9.所述加速模块可拆卸安装所述车体与油门踏板之间,所述加速模块用于推动所述油门踏板;
10.所述制动模块可拆卸安装在所述车体与制动踏板之间,所述制动模块用于推动所述制动踏板;
11.所述离合器控制模块可拆卸安装在所述车体与离合踏板之间,所述离合器控制模块用于推动所述离合踏板;
12.所述挡位控制模块可拆卸安装在所述车体与挡把之间,所述挡位控制模块用于推动所述挡把。
13.可选的,所述供油模块通过快拆结构可拆卸连接在所述油泵阀柄和所述车体之
间,
14.和/或所述加速模块通过所述快拆结构可拆卸连接在所述油门踏板和所述车体之间,
15.和/或所述制动模块通过所述快拆结构可拆卸连接在所述制动踏板和所述车体之间,
16.和/或所述离合器控制模块通过所述快拆结构可拆卸连接在所述离合踏板和所述车体之间,
17.和/或所述挡位控制模块通过所述快拆结构可拆卸连接在所述挡把和所述车体之间。
18.可选的,所述供油模块包括第一电动推杆和供油固定件;所述第一电动推杆的第一端与所述油泵阀柄铰接,所述第一电动推杆的第二端与所述供油固定件铰接;所述供油固定件安装在所述车体上;所述第一电动推杆内置有编码器,所述第一电动推杆与所述控制器电连接。
19.可选的,所述加速模块包括第二电动推杆、油门连接件和加速固定件;所述第二电动推杆的第一端与所述油门连接件铰接,所述第二电动推杆的第二端与所述加速固定件铰接;所述油门连接件安装在所述油门踏板上,所述加速固定件安装在所述车体上;所述第二电动推杆内置有编码器,所述第二电动推杆与所述控制器电连接。
20.可选的,所述制动模块包括第一气缸、制动连接件和制动固定件;所述第一气缸的第一端与所述制动连接件铰接,所述第一气缸的第二端与所述制动固定件铰接;所述制动连接件安装在所述制动踏板上,所述制动固定件安装在所述车体上;所述第一气缸通过电磁阀与所述控制器电连接;所述制动连接件上设有制动接近开关,所述制动接近开关与所述控制器电连接。
21.可选的,所述离合器控制模块包括第二气缸、离合连接件和离合固定件;所述第二气缸的第一端与所述离合连接件铰接,所述第二气缸的第二端与所述离合固定件铰接;所述离合连接件安装在所述离合踏板上,所述离合固定件安装在所述车体上;所述第二气缸通过电磁阀与所述控制器电连接;所述离合连接件上设有离合接近开关,所述离合接近开关与所述控制器电连接。
22.可选的,所述挡位控制模块包括第一换挡气缸、第二换挡气缸、换挡架和固定板;所述第一换挡气缸沿第一方向设置,所述第二换挡气缸沿第二方向设置,所述第一方向与所述第二方向互相垂直;所述第一换挡气缸的第一端与所述挡把铰接,所述第一换挡气缸的第二端与所述换挡架连接;所述第二换挡气缸的第一端与所述换挡架连接,所述第二换挡气缸的第二端与所述车体连接;
23.所述第一换挡气缸和所述第二换挡气缸均为双联气缸;
24.所述固定板设置在所述车体上,所述固定板上设有八个沿所述挡把周向布置的换挡接近开关,八个所述换挡接近开关均与所述控制器电连接;
25.所述第一换挡气缸和所述第二换挡气缸均通过电磁阀与所述控制器电连接。
26.可选的,所述固定板通过导向机构与所述换挡架滑动连接,所述导向机构沿所述第二方向布置。
27.可选的,所述第一换挡气缸的第二端通过鱼眼杆端关节轴承与所述换挡架连接,
28.和/或所述第二换挡气缸的第一端通过所述鱼眼杆端关节轴承与所述换挡架连接;
29.和/或所述第二换挡气缸的第二端通过所述鱼眼杆端关节轴承与所述车体连接。
30.可选的,所述第一电动推杆的第一端通过所述快拆结构与所述油泵阀柄连接,第二端通过所述快拆结构与所述供油固定件连接。
31.可选的,所述第二电动推杆的第一端通过所述快拆结构与所述油门连接件连接,第二端通过所述快拆结构与所述加速固定件连接。
32.可选的,所述第一气缸的第一端通过所述快拆结构与所述制动连接件连接,第二端通过所述快拆结构与所述制动固定件连接。
33.可选的,所述第二气缸的第一端通过所述快拆结构与所述离合连接件连接,第二端通过所述快拆结构与所述离合固定件连接。
34.可选的,所述快拆结构为快拆销。
35.可选的,还包括无线模块,所述无线模块分别与所述控制器和所述供油模块电连接。
36.可选的,还包括摄像机,所述摄像机与所述无线模块电连接。
37.可选的,还包括障碍物报警模块,所述障碍物报警模块包括探测雷达和声光报警装置,所述探测雷达和所述声光报警装置均与所述控制器电连接。
38.第二方面,本公开提供了一种基于退役履带装甲车的遥控移动靶车,包括如上所述的移动靶车,还包括两组操纵杆控制模块;
39.每组所述操纵杆控制模块均包括操纵杆气缸、操纵杆连接件、操纵杆固定件和两个操纵杆接近开关;所述操纵杆气缸为双联气缸,所述操纵杆气缸的第一端与所述操纵杆连接件铰接,所述操纵杆气缸的第二端与所述操纵杆固定件铰接;所述操纵杆连接件安装在所述遥控移动靶车的操纵杆上,所述操纵杆固定件安装在所述移动靶车的车体上;所述操纵杆气缸通过电磁阀与所述移动靶车的控制器电连接,两个所述操纵杆接近开关分别安装在所述操纵杆连接件和所述操纵杆固定件上,两个所述操纵杆接近开关均与所述移动靶车的控制器电连接。
40.可选的,所述操纵杆连接件为快拆卡箍,所述操纵杆连接件套设在所述操纵杆上。
41.本公开实施例提供的技术方案与现有技术相比具有如下优点:
42.本公开提供的移动靶车,通过控制器、供油模块、加速模块、制动模块、离合器控制模块和挡位控制模块的设置,组成了一套可以远程控制移动靶车的操控装置,同时,利用供油模块、加速模块、制动模块、离合器控制模块和挡位控制模块均可拆卸安装在车体以及与其对应的操控件之间,在实现可以远程控制移动靶车的同时,不影响移动靶车原有的操控结构,并且在需要使用人力进行移动靶车的驾驶工作时,能够快速拆装整套装置,实现人力快速拆装机器的目的。
附图说明
43.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
44.为了更清楚地说明本公开实施例或现有技术中的技术方案,下面将对实施例或现
有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
45.图1为本公开实施例所述的移动靶车的远程控制的各部件连接示意图;
46.图2为本公开实施例所述的移动靶车的供油模块的结构示意图;
47.图3为本公开实施例所述的移动靶车的加速模块的结构示意图;
48.图4为本公开实施例所述的移动靶车的制动模块的结构示意图;
49.图5为本公开实施例所述的移动靶车的离合器控制模块的结构示意图;
50.图6为本公开实施例所述的移动靶车的挡位控制模块的结构示意图;
51.图7为本公开实施例所述的移动靶车的挡位控制模块与挡把连接的结构示意图;
52.图8为本公开实施例所述的移动靶车的操纵杆控制模块的结构示意图;
53.图9为本公开实施例所述的移动靶车的遥控驾驶显控平台的结构示意图;
54.图10为本公开实施例所述的移动靶车的遥控驾驶显控平台的操作面板的结构示意图。
55.其中,1、遥控驾驶显控平台;2、供油模块;21、第一电动推杆; 22、供油固定件;3、加速模块;31、第二电动推杆;32、油门连接件; 33、加速固定件;4、制动模块;41、第一气缸;42、制动连接件;43、制动固定件;44、制动接近开关;5、离合器控制模块;51、第二气缸; 52、离合连接件;53、离合固定件;54、离合接近开关;6、挡位控制模块;61、第一换挡气缸;62、第二换挡气缸;63、换挡架;64、固定板;65、换挡接近开关;66、导向机构;67、鱼眼杆端关节轴承; 71、车体;72、油门踏板;73、制动踏板;74、离合踏板;75、挡把; 76、油泵阀柄;77、操纵杆;8、快拆结构;9、操纵杆控制模块;91、操纵杆气缸;92、操纵杆连接件;93、操纵杆固定件;94、操纵杆接近开关。
具体实施方式
56.为了能够更清楚地理解本公开的上述目的、特征和优点,下面将对本公开的方案进行进一步描述。需要说明的是,在不冲突的情况下,本公开的实施例及实施例中的特征可以相互组合。
57.在下面的描述中阐述了很多具体细节以便于充分理解本公开,但本公开还可以采用其他不同于在此描述的方式来实施;显然,说明书中的实施例只是本公开的一部分实施例,而不是全部的实施例。
58.目前,我国退役装备数量大、种类多,这些退役装备专库存储、专人值守,占用较多资源。如何处理退役装备,发挥出退役装备的最大价值,释放被其占用的资源是一个亟待解决的问题。
59.另外,长期以来,“靶场思维”盛行,实弹演习打击的目标多以土堆、固定靶标、白灰圈等固定假目标为主,战场仿真程度弱,战士融入感不强,射击训练效果不理想。如何营造逼真的战场环境,提升射击移动靶的水平,打造“装备蓝军”,也是亟待解决的问题。
60.移动靶车是一种“打废即弃”的装备,研制全新的运动靶标,时间周期长,成本高。现有的无人驾驶车辆的实现方式是采用自动控制体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,在国防和国民经济领域具有广阔的应用前景,但是目前使用的无人驾驶车辆都很难从人员驾驶和机器驾驶这两
种模式中进行快速切换,这就导致在某些运输路段,无法使用远程操控机器驾驶车辆时,切换成人员驾驶模式困难,需要重新花费大量的时间精力对车上设备进行拆装和重组,非常影响整个运输过程的效率。
61.基于此,本实施例提供一种移动靶车以及基于退役履带装甲车的遥控移动靶车,通过控制器、供油模块、加速模块、制动模块、离合器控制模块和挡位控制模块的设置,组成了一套可以远程控制移动靶车的操控装置,同时,利用供油模块、加速模块、制动模块、离合器控制模块和挡位控制模块均可拆卸安装在车体以及与其对应的操控件之间,在实现可以远程控制移动靶车的同时,不影响移动靶车原有的操控结构,并且在需要使用人力进行移动靶车的驾驶工作时,能够快速拆装整套装置,实现人力快速拆装机器的目的。下面通过具体的实施例对其进行详细说明:
62.参照图1至图10所示,本实施例提供的一种移动靶车包括:控制器、供油模块2、加速模块3、制动模块4、离合器控制模块5和挡位控制模块6;供油模块2、加速模块3、制动模块4、离合器控制模块5 和挡位控制模块6均与控制器电连接;供油模块2可拆卸安装在移动靶车的车体71和油泵阀柄76之间;加速模块3可拆卸安装车体71与油门踏板72之间,加速模块3用于推动油门踏板72;制动模块4可拆卸安装在车体71与制动踏板73之间,制动模块4用于推动制动踏板 73;离合器控制模块5可拆卸安装在车体71与离合踏板74之间,离合器控制模块5用于推动离合踏板74;挡位控制模块6可拆卸安装在车体71与挡把75之间,挡位控制模块6用于推动挡把75;应当能够理解的是,控制器以及其它用电器均使用移动靶车上的车载电源供电。
63.其中,通过控制器、供油模块2、加速模块3、制动模块4、离合器控制模块5和挡位控制模块6的设置,组成了一套可以远程控制移动靶车的操控装置,同时,利用供油模块2、加速模块3、制动模块4、离合器控制模块5和挡位控制模块6均可拆卸安装在车体71以及与其对应的操控件之间,在实现可以远程控制移动靶车的同时,不影响移动靶车原有的操控结构,并且在需要使用人力进行移动靶车的驾驶工作时,能够快速拆装整套装置,实现人力快速拆装机器的目的。
64.继续参照图2至图8所示,供油模块2通过快拆结构8可拆卸连接在油泵阀柄76和车体71之间,和/或加速模块3通过快拆结构8可拆卸连接在油门踏板72和车体71之间,和/或制动模块4通过快拆结构8可拆卸连接在制动踏板73和车体71之间,和/或离合器控制模块 5通过快拆结构8可拆卸连接在离合踏板74和车体71之间,和/或挡位控制模块6通过快拆结构8可拆卸连接在挡把75和车体71之间;通过快拆结构8的设置,能够实现快速拆装供油模块2、加速模块3、制动模块4、离合器控制模块5和挡位控制模块6的动作,进一步提高整套操控装置的拆装效率,从而提高该移动靶车的运输效率。
65.继续参照图2所示,供油模块2包括第一电动推杆21和供油固定件22;第一电动推杆21的第一端与油泵阀柄76铰接,第一电动推杆 21的第二端与供油固定件22铰接;供油固定件22安装在车体71上;第一电动推杆21内置有编码器,第一电动推杆21与控制器电连接;通过第一电动推杆21和编码器的配合设置,能够准确测量第一电动推杆21的伸缩长度尺寸并将其反馈至控制器,控制器根据预先设定值判断油泵阀门的开合程度;通过第一电动推杆21的两端都是铰接的连接方式能够保证第一电动推杆21在伸缩时能够跟随油泵阀柄76的摆动做适应性的晃动动作,提高整个供油模块2的灵活度,防止零件损坏。
66.继续参照图3所示,加速模块3包括第二电动推杆31、油门连接件32和加速固定件33;第二电动推杆31的第一端与油门连接件32 铰接,第二电动推杆31的第二端与加速固定件33铰接;油门连接件 32安装在油门踏板72上,加速固定件33安装在车体71上,当车体 71上设有固定的管状结构时,也可以使用卡箍等结构作为加速固定件 33,只要能够保证加速固定件33能够可靠的连接在移动靶车上即可;第二电动推杆31内置有编码器,第二电动推杆31与控制器电连接;通过第二电动推杆31和编码器的配合设置,能够准确测量第二电动推杆31的伸缩长度尺寸并将其反馈至控制器,控制器根据预先设定值判断油门踏板72的开合程度;通过第二电动推杆31的两端都是铰接的连接方式能够保证第二电动推杆31在伸缩时能够跟随油门踏板72的摆动做适应性的晃动动作,提高整个加速模块3的灵活度,防止零件损坏。
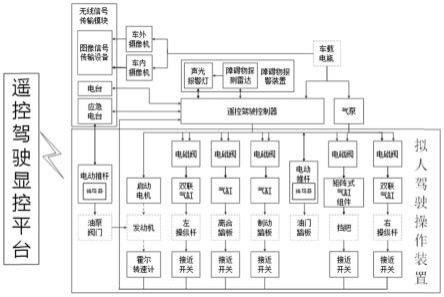
67.继续参照图4所示,制动模块4包括第一气缸41、制动连接件42 和制动固定件43;第一气缸41的第一端与制动连接件42铰接,第一气缸41的第二端与制动固定件43铰接;制动连接件42安装在制动踏板73上,制动固定件43安装在车体71上;第一气缸41通过电磁阀与控制器电连接;制动连接件42上设有制动接近开关44,制动接近开关44与控制器电连接;其中,控制器能够通过制动接近开关44测得制动踏板73的位置,通过第一气缸41能够直接控制制动踏板73在制动位置和自然位置切换;同时通过第一气缸41的两端都是铰接的连接方式能够保证第一气缸41在伸缩时能够跟随制动踏板73的摆动做适应性的晃动动作,提高整个制动模块4的灵活度,防止零件损坏。
68.继续参照图5所示,离合器控制模块5包括第二气缸51、离合连接件52和离合固定件53;第二气缸51的第一端与离合连接件52铰接,第二气缸51的第二端与离合固定件53铰接;离合连接件52安装在离合踏板74上,离合固定件53安装在车体71上;第二气缸51通过电磁阀与控制器电连接;离合连接件52上设有离合接近开关54,离合接近开关54与控制器电连接;其中,控制器能够通过离合接近开关54 测得离合踏板74的位置,通过第二气缸51能够直接控制离合踏板74 在制动位置和自然位置切换;同时通过第二气缸51的两端都是铰接的连接方式能够保证第二气缸51在伸缩时能够跟随离合踏板74的摆动做适应性的晃动动作,提高整个离合器控制模块5的灵活度,防止零件损坏。
69.继续参照图6和图7所示,挡位控制模块6包括第一换挡气缸61、第二换挡气缸62、换挡架63和固定板64;第一换挡气缸61沿第一方向设置,第二换挡气缸62沿第二方向设置,第一方向与第二方向互相垂直;第一换挡气缸61和第二换挡气缸62组成矩阵式气缸组件;第一换挡气缸61的第一端与挡把75铰接,第一换挡气缸61的第二端与换挡架63连接;第二换挡气缸62的第一端与换挡架63连接,第二换挡气缸62的第二端与车体71连接;第一换挡气缸61和第二换挡气缸 62均为双联气缸;应当能够理解的是,双联气缸由两只普通气缸串联组成。双联气缸则有两只气缸杆同时伸出、同时缩回、一只气缸杆伸出一只气缸杆缩回三种状态,双联气缸可实现三个位置的控制;第一换挡气缸61用于推动挡把75在第一方向上提供三个工作位置,第二换挡气缸62用于推动挡把75在第二方向上提供三个工作位置,也就是说挡把75具有九个工作位置,其中包括六个结合挡位和三个空挡位;固定板64设置在车体71上,固定板64上设有八个沿挡把75周向布置的换挡接近开关65,八个换挡接近开关65均与控制器电连接;第一换挡气缸61和第二换挡气缸62均通过电磁阀与控制器电连接;通过八个换挡接近开关65的设置能够使控制器测得挡把75在九个工作位置中的具体位置;
通过固定板64能够为换挡接近开关65提供安装位置的同时,也能使整个挡位控制模块6更稳定,更可靠。
70.在一些实施例中,固定板64通过导向机构66与换挡架63滑动连接,导向机构66沿第二方向布置;导向机构66可以是滑块和导向杆组成,其中的一者连接在换挡架63上,另一者连接在固定板64上,也可以是其他能够实现在第二方向上进行导向的结构。
71.继续参照图6和图7所示,第一换挡气缸61的第二端通过鱼眼杆端关节轴承67与换挡架63连接,和/或第二换挡气缸62的第一端通过鱼眼杆端关节轴承67与换挡架63连接;和/或第二换挡气缸62的第二端通过鱼眼杆端关节轴承67与车体71连接;通过鱼眼杆端关节轴承 67的设置能够使与其两端连接的两个部件之间的连接更灵活,能够实现一定的晃动动作,进而保证两端的两个部件的使用寿命。
72.在一些实施例中,第一电动推杆21的第一端通过快拆结构8与油泵阀柄76连接,第二端通过快拆结构8与供油固定件22连接。第二电动推杆31的第一端通过快拆结构8与油门连接件32连接,第二端通过快拆结构8与加速固定件33连接。第一气缸41的第一端通过快拆结构8与制动连接件42连接,第二端通过快拆结构8与制动固定件 43连接。第二气缸51的第一端通过快拆结构8与离合连接件52连接,第二端通过快拆结构8与离合固定件53连接。第一电动推杆21、第二电动推杆31、第一气缸41和第二气缸51的两端均设有快拆结构8,而第一电动推杆21、第二电动推杆31、第一气缸41和第二气缸51又作为该移动靶车可拆卸替换占用体积最大以及重量最大的部分,能够更快的帮助人员完成整套设备的拆装工作,在一些实施例中,快拆结构8为快拆销,此时第一电动推杆21、第二电动推杆31、第一气缸41 和第二气缸51的两端不仅能通过快拆结构8实现快速拆装,还能利用快拆结构8作为转轴实现铰接,简化结构的同时还能保证结构的可靠性。
73.继续参照图1所示,该移动靶车还包括无线模块,无线模块分别与控制器和供油模块2电连接;通过无线模块的设置,能够使该移动靶车实现远程操控,利用远程的遥控驾驶显控平台1对移动靶车的行进动作进行精准控制;还能通过无线模块直接与供油模块2连接的方式,从而在移动靶车发生事故时,及时切断油路供油,保证移动靶车的安全性。
74.在一些实施例中,该移动靶车还包括摄像机,摄像机与无线模块电连接;摄像机包括车内摄像机和车外摄像机,用来全角度观察移动靶车的位置和姿态。
75.在进一步的实施例中,该移动靶车还包括障碍物报警模块,障碍物报警模块包括探测雷达和声光报警装置,探测雷达和声光报警装置均与控制器电连接;这样设置能够在发生碰撞前及时提醒人员进行制动或避让。
76.第二方面,继续参照图8所示,本公开提供了一种基于退役履带装甲车的遥控移动靶车,包括如上所述的移动靶车,还包括两组操纵杆控制模块9;每组操纵杆控制模块9均包括操纵杆气缸91、操纵杆连接件92、操纵杆固定件93和两个操纵杆接近开关94;操纵杆气缸 91为双联气缸,操纵杆气缸91的第一端与操纵杆连接件92铰接,操纵杆气缸91的第二端与操纵杆固定件93铰接;操纵杆连接件92安装在遥控移动靶车的操纵杆77上,操纵杆固定件93安装在移动靶车的车体71上;操纵杆气缸91通过电磁阀与移动靶车的控制器电连接,两个操纵杆接近开关94分别安装在操纵杆连接件92和操纵杆固定件 93上,两个操纵杆接近开关94均与移动靶车的控制器电连接;两组操纵杆控制模块9分别设置在基于退役履带装甲车的遥控移动靶车左操纵杆和右操纵杆上;应当能够理解的是,双联气缸由两只普通气
缸串联组成。双联气缸则有两只气缸杆同时伸出、同时缩回、一只气缸杆伸出一只气缸杆缩回三种状态,双联气缸可实现三个位置的控制。
77.在一些实施例中,操纵杆连接件92为快拆卡箍,操纵杆连接件92 套设在操纵杆77上;需要说明的是,当油门踏板72、制动踏板73和离合踏板74为杆状结构时,油门连接件32、制动连接件42和离合连接件52均可使用快拆卡箍结构,应当能够理解的是,快拆卡箍与内部的杆状结构为间隙配合,且具有一定调节空隙,从而保证杆状结构的晃动不会影响移动靶车的控制,防止操纵装置卡死。
78.在进一步的实施例中,快拆卡箍通过蝶形螺母锁止,能够更方便人员进行安装和解锁,进一步提高拆装效率。
79.具体实现方式和实现原理与上述实施例相同,并能带来相同或者类似的技术效果,在此不再一一赘述,具体可参照上述移动靶车实施例的描述。
80.需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
81.以上所述仅是本公开的具体实施方式,使本领域技术人员能够理解或实现本公开。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本公开的精神或范围的情况下,在其它实施例中实现。因此,本公开将不会被限制于本文所述的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。