1.本发明涉及无人机轨迹规划领域,特别涉及一种基于改进蚁群算法的空间环境无人机轨迹规划方法。
背景技术:
2.近年来,随着无人机技术被广泛应用于各个领域,无人机的导航规划问题引起人们的研究兴趣。无人机采用电池供电,其航行轨迹的优劣将直接影响无人机的工作时间。特别是在执行一些复杂的地域环境任务时,如桥梁监测、电力巡视、火山勘测等等,对无人机航行轨迹的安全性和持久性要求尤为突出。
3.但是,以往的研究往往只是将上述问题简化为二维平面的机器人路径规划问题,这并不符合实际的空间环境的调度场景。同时,在做无人机导航环境建模时,也没有结合使用场景给出具体的建模过程。
4.蚁群算法是一种模拟蚂蚁在觅食时寻找最短路径的启发式算法。最早是由意大利学者dorigo m.于1991年提出,该算法在解决tsp和车辆路径问题上效果较优。但是在空间环境中,无人机的轨迹规划问题会面临巨大的搜索空间和障碍环境因素,进而导致传统的蚁群算法收敛速度缓慢、易陷入局部最优等问题。
技术实现要素:
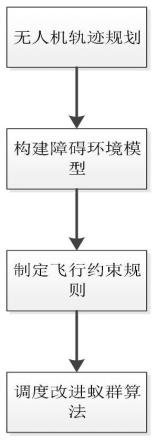
5.本发明要解决的技术问题是克服现有技术的缺陷,提供一种基于改进蚁群算法的空间环境无人机轨迹规划方法,解决在空间障碍环境中,传统蚁群算法在无人机轨迹规划时收敛速度缓慢,易陷入局部最优等问题。本发明通过构建障碍环境模型、制定飞行约束规则、调度改进蚁群算法,规划出一条可行的理想的航行轨迹。该航行轨迹主要考虑的是轨迹长度和幅度,并且通过权重因子w1,w2来动态调整目标轨迹。最后提出了一种改进的蚁群算法,通过引入增强因子g和动态信息素q,来加速蚁群算法收敛至全局最优。
6.本发明提供了如下的技术方案:
7.本发明提供一阶段构建障碍环境模型:该阶段需要预先采集无人机飞行区域的环境信息,通过建立空间坐标系和栅格化三维空间来模拟无人机飞行的障碍环境;这些环境信息可以存储在数据库中,以便后续轨迹规划使用,具体步骤如下所示:
8.s1:建立空间坐标系来确定空间中的唯一位置(x
l
,yw,zh),其中x
l
为长度,yw为宽度,zh为高度;这里给具体的建模规则,以x轴分割平面建模为例;在沿着x轴方向上,将三维空间分割为垂直于y轴和z轴的l 1个平面,用表示每个平面;再沿着y轴和z轴将每个平面分割为(h 1)(w 1)个网格,最终,整个封闭的三维空间被划分为(h 1)(l 1)(w 1)个相同的立方体;每个立方体的位置由空间坐标唯一确定;
9.s2:设置障碍区域,通过一个二维矩阵来描述每个平面的障碍区域,其中0表示非障碍区域,无人机可以飞行;1表示障碍区域,无人机不能飞行;
10.二阶段制定飞行约束规则:环境模型建立后,需要规划无人机从基站飞行到多个
观察节点,再飞回基站的闭环航行轨迹;该轨迹可以用一个节点列表来表示(列表中节点序列可以按照请求先后顺序排序);其中两个相邻观察节点之间的飞行轨迹可以视为n个不同平面栅格节点的连线,用矩阵path
(s,e)
来表示,具体见公式(1):
[0011][0012]
该飞行轨迹需要满足无人机飞行的相关约束规则,为了方便计算,简化规则如下:
[0013]
s3:(最大飞行框)无人机飞行时,需要限制无人机前后平面栅格点幅度差,以防止无人机爬升角超过飞行限制,使无人机失速坠毁;这里提出最大飞行框概念,约束无人机后续平面可选位置范围,约束条件见公式(2):
[0014][0015]
无人机在选择下一个平面时,坐标系位置,(x
l
,yw,zh)从(x
min
≤x
l
≤x
max
),(y
min
≤yw≤y
max
),(z
min
≤zh≤z
max
)中选择,具体如图4所示;
[0016]
s4:(可选节点域)空间障碍环境模型建立后,将三维空间划分为可飞行空间o
free
∈value(pi)=0和障碍空间o
obs
∈value(pi)=1;无人机必须选择可飞行空间中的节点,约束条件见公式(3):
[0017]
pi={(x,y,z)|(x,y,z)∈o
free
}
ꢀꢀ
(3);
[0018]
s5:(目标函数)目标函数主要考虑的是无人机轨迹的长度和幅度两个方面;其中轨迹长度是根据路径矩阵path计算前后两个节点欧氏距离的累计和;幅度是根据路径矩阵path计算前后两个节点幅度差的累计和,具体见公式(4),(5);
[0019][0020][0021]
由上述公式(4),(5)可以得到优化目标函数(6),
[0022][0023]
其中w1,w2为长度和幅度的权重因子,用来动态控制轨迹优化目标;
[0024]
s6:三阶段调度改进蚁群算法:群算法是一种模拟蚂蚁在觅食时寻找最短路径的启发式算法;但是在空间障碍环境中,无人机的轨迹规划问题会面临巨大的搜索空间和障碍环境因素,进而导致传统的蚁群算法收敛速度缓慢、易陷入局部最优等问题;为了解决这个问题,本发明引入增强因子g和信息素强度值q,来加快算法的收敛;
[0025]
s7:引入增强因子g,蚁群在寻找最短路径的过程中,每当有新的最短路径出现时,该路径将会引导后续的蚂蚁聚集在该路径;为了增加吸引力度,本发明提出了增强因子g来加快算法收敛,其中f
best
(path)是新的最优解,f
befre-best
(path)是之前的最优解,具体如式(7)所示:
[0026][0027]
s8:信息素强度值q,是一个影响蚁群算法性能的重要参数;本发明设计了一个动态信息素强度值q,其中β为强度系数,n为迭代次数;在前期,q值较小保持了较高的搜索能力;后期,q值增加来加速算法收敛,具体如式(8)所示;
[0028]
q=q β
×nꢀꢀ
(8)
[0029]
s9:状态转换,蚁群中的蚂蚁从平面pi选择下一个平面pj中节点的选择机制叫做状态转换,具体如公式(9),(10)所示;
[0030][0031][0032]
其中τ(pj),η(pi,pj)是平面pi选择下一个平面pj网格点时的信息素和启发式信息,α,β分别为信息素和启发式信息的权重;q0是一个常数,q是一个随机变量;当q>q0,选取最大飞行框中启发式信息最大的下一平面网格节点(9);当q≤q0时,采用轮盘赌轮选择下一平面网格节点(10);
[0033]
s10:在路径启发式信息η(pi,pj)上,综合考虑了平滑性、可达性和安全性三个指标,公式(11)、(12)、(13);
[0034][0035][0036][0037]
由上可得路径启发式信息η(pi,pj)计算公式为(14);
[0038]
η(pi,pj)=smoothness(pi,pj)
w3
×
reachability(pi,pj)
w4
×
safeness(pj)
w5
ꢀꢀ
(14)
[0039]
其中smoothness(pi,pj)表示轨迹的光滑性,防止无人机频繁改变航线,规划出选择一条相对平稳的航线;reachability(pj,p
traget
)表示轨迹的可到达性,选取网格节点与目标节点之间的距离作为可达性的参考依据;safeness(pi,pj)表示轨迹的安全性,无人机不能选择障碍物空间栅格节点作为下一平面节点,w3,w4,w5分别为三个指标权值;
[0040]
s11:更新策略是用来模拟蚁群走过路径后散发信息素的挥发过程,这里使用局部更新和全局更新;
[0041]
局部更新:当蚂蚁进行状态选择时,更新两个栅格节点之间的信息素,更新公式如(15);
[0042]
τ(pj)=τ(pj)
×
(1-p) p
×
δτ
[0043]
δτ=τ0ꢀꢀ
(15)
[0044]
全局更新:n只蚂蚁完成一次迭代后,用最优路径信息素更新航行轨迹的信息素,如式(16)所示;
[0045]
τ(path)=τ(pi)
×
(1-p) p
×
δτ(pi) g
×
δτ(pi)
[0046]
δτ(pi)=q/f
value
(path)
ꢀꢀ
(16)
[0047]
其中,p为蒸发系数,g为增强信息素强度值,q为增强因子;综上得到无人机轨迹规划算法;
[0048]
s12:改进蚁群算法引入了增强信息素强度值g和动态增强因子q,使蚁群在迭代时始终保持向着最优轨迹聚集的特性;同时,在前期每次迭代的最优轨迹差值往往比较大,g值较大,q值较小,可以加速算法收敛,减少缓慢无效的迭代过程;而到了后期,蚁群寻优轨迹基本确定,最优轨迹差异较小,g值较小,q值较大,加强蚁群在每次最优轨迹周围的寻优能力。
[0049]
与现有技术相比,本发明的有益效果如下:
[0050]
(1)本专利结合了利用无人机给桥梁监测的场景,给出了具体的空间障碍环境建模过程。并针对三维桥梁环境建模;
[0051]
给出最终的建模模型,同时考虑了桥梁中桥柱,桥墩等空间障碍物的影响;
[0052]
(2)本法明在蚁群算法的基础上引入了增强因子g和动态信息素强度q,使算法在前期保持了较高的空间搜索能力;到了后期会加速算法收敛;
[0053]
(3)本发明提出了一种空间环境下的无人机轨迹的优化目标函数,通过设置不同的权重因子动态调整优化目标。最后在保障无人机安全的前提下,使轨迹长度和幅度明显降低。
附图说明
[0054]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0055]
图1是本发明的轨迹规划阶段流程图;
[0056]
图2是本发明的无人机调度场景图;
[0057]
图3是本发明的空间坐标系分割图;
[0058]
图4是本发明的桥梁栅格环境模型示意图;
[0059]
图5是最大飞行框示意图;
[0060]
图6是改进蚁群算法流程图;
[0061]
图7是蚁群算法迭代图;
[0062]
图8是改进蚁群算法迭代图;
[0063]
图9是桥梁环境建模图;
[0064]
图10是轨迹可视化模拟图(配置1);
[0065]
图11是轨迹可视化模拟图(配置2)。
具体实施方式
[0066]
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。其中附图中相同的标号全部指的是相同的部件。
[0067]
实施例1
[0068]
如图1-11,本发明提供一阶段构建障碍环境模型:该阶段需要预先采集无人机飞行区域的环境信息,通过建立空间坐标系和栅格化三维空间来模拟无人机飞行的障碍环境。这些环境信息可以存储在数据库中,以便后续轨迹规划使用,具体步骤如下所示:
[0069]
s1:建立空间坐标系来确定空间中的唯一位置(x
l
,yw,zh),其中x
l
为长度,yw为宽度,zh为高度。这里给具体的建模规则,以x轴分割平面建模为例。在沿着x轴方向上,将三维空间分割为垂直于y轴和z轴的l 1个平面,用表示每个平面。再沿着y轴和z轴将每个平面分割为(h 1)(w 1)个网格,最终,整个封闭的三维空间被划分为(h 1)(l 1)(w 1)个相同的立方体。每个立方体的位置由空间坐标唯一确定;具体如图2所示;
[0070]
s2:设置障碍区域,通过一个二维矩阵来描述每个平面的障碍区域,其中0表示非障碍区域,无人机可以飞行;1表示障碍区域,无人机不能飞行;具体如图3所示;
[0071]
二阶段制定飞行约束规则:环境模型建立后,需要规划无人机从基站飞行到多个观察节点,再飞回基站的闭环航行轨迹。该轨迹可以用一个节点列表来表示(列表中节点序列可以按照请求先后顺序排序)。其中两个相邻观察节点之间的飞行轨迹可以视为n个不同平面栅格节点的连线,用矩阵path
(s,e)
来表示,具体见公式(1):
[0072][0073]
该飞行轨迹需要满足无人机飞行的相关约束规则,为了方便计算,简化规则如下:
[0074]
s3:(最大飞行框)无人机飞行时,需要限制无人机前后平面栅格点幅度差,以防止无人机爬升角超过飞行限制,使无人机失速坠毁。这里提出最大飞行框概念,约束无人机后续平面可选位置范围,约束条件见公式(2):
[0075][0076]
无人机在选择下一个平面时,坐标系位置,(x
l
,yw,zh)从(x
min
≤x
l
≤x
max
),(y
min
≤yw≤y
max
),(z
min
≤zh≤z
max
)中选择,具体如图4所示;
[0077]
s4:(可选节点域)空间障碍环境模型建立后,将三维空间划分为可飞行空间o
free
∈value(pi)=0和障碍空间o
obs
∈value(pi)=1。无人机必须选择可飞行空间中的节点,约束条件见公式(3):
[0078]
pi={(x,y,z)|(x,y,z)∈o
free
}
ꢀꢀ
(3);
[0079]
s5:(目标函数)目标函数主要考虑的是无人机轨迹的长度和幅度两个方面。其中轨迹长度是根据路径矩阵path计算前后两个节点欧氏距离的累计和;幅度是根据路径矩阵path计算前后两个节点幅度差的累计和,具体见公式(4),(5);
[0080][0081][0082]
由上述公式(4),(5)可以得到优化目标函数(6),
[0083][0084]
其中w1,w2为长度和幅度的权重因子,用来动态控制轨迹优化目标;
[0085]
s6:三阶段调度改进蚁群算法:群算法是一种模拟蚂蚁在觅食时寻找最短路径的启发式算法。最早是由意大利学者dorigo m.于1991年提出,该算法在解决tsp和车辆路径问题上效果较优。但是在空间障碍环境中,无人机的轨迹规划问题会面临巨大的搜索空间和障碍环境因素,进而导致传统的蚁群算法收敛速度缓慢、易陷入局部最优等问题。为了解决这个问题,本发明引入增强因子g和信息素强度值q,来加快算法的收敛;
[0086]
s7:引入增强因子g,蚁群在寻找最短路径的过程中,每当有新的最短路径出现时,该路径将会引导后续的蚂蚁聚集在该路径。为了增加吸引力度,本发明提出了增强因子g来加快算法收敛,其中f
best
(path)是新的最优解,f
befre-best
(path)是之前的最优解,具体如式(7)所示:
[0087][0088]
s8:信息素强度值q,是一个影响蚁群算法性能的重要参数。本发明设计了一个动态信息素强度值q,其中β为强度系数,n为迭代次数。在前期,q值较小保持了较高的搜索能力;后期,q值增加来加速算法收敛,具体如式(8)所示;
[0089]
q=q β
×nꢀꢀ
(8)
[0090]
s9:状态转换,蚁群中的蚂蚁从平面pi选择下一个平面pj中节点的选择机制叫做状态转换,具体如公式(9),(10)所示;
[0091]
[0092][0093]
其中τ(pj),η(pi,pj)是平面pi选择下一个平面pj网格点时的信息素和启发式信息,α,β分别为信息素和启发式信息的权重。q0是一个常数,q是一个随机变量。当q>q0,选取最大飞行框中启发式信息最大的下一平面网格节点(9);当q≤q0时,采用轮盘赌轮选择下一平面网格节点(10);
[0094]
s10:在路径启发式信息η(pi,pj)上,综合考虑了平滑性、可达性和安全性三个指标,公式(11)、(12)、(13);
[0095][0096][0097][0098]
由上可得路径启发式信息η(pi,pj)计算公式为(14);
[0099]
η(pi,pj)=smoothness(pi,pj)
w3
×
reachability(pi,pj)
w4
×
safeness(pj)
w5
ꢀꢀ
(14)
[0100]
其中smoothness(pi,pj)表示轨迹的光滑性,防止无人机频繁改变航线,规划出选择一条相对平稳的航线;reachability(pj,p
traget
)表示轨迹的可到达性,选取网格节点与目标节点之间的距离作为可达性的参考依据;safeness(pi,pj)表示轨迹的安全性,无人机不能选择障碍物空间栅格节点作为下一平面节点,w3,w4,w5分别为三个指标权值;
[0101]
s11:更新策略是用来模拟蚁群走过路径后散发信息素的挥发过程,这里使用局部更新和全局更新。
[0102]
局部更新:当蚂蚁进行状态选择时,更新两个栅格节点之间的信息素,更新公式如(15);
[0103]
τ(pj)=τ(pj)
×
(1-p) p
×
δτ
[0104]
δτ=τ0ꢀꢀ
(15)
[0105]
全局更新:n只蚂蚁完成一次迭代后,用最优路径信息素更新航行轨迹的信息素,如式(16)所示;
[0106]
τ(path)=τ(pi)
×
(1-p) p
×
δτ(pi) g
×
δτ(pi)
[0107]
δτ(pi)=q/f
value
(path)
ꢀꢀ
(16)
[0108]
其中,p为蒸发系数,g为增强信息素强度值,q为增强因子。综上得到无人机轨迹规划算法,如下面算法1所示,流程图如图6所示;
[0109][0110][0111]
s12:改进蚁群算法引入了增强信息素强度值g和动态增强因子q,使蚁群在迭代时始终保持向着最优轨迹聚集的特性。同时,在前期每次迭代的最优轨迹差值往往比较大,g值较大,q值较小,可以加速算法收敛,减少缓慢无效的迭代过程;而到了后期,蚁群寻优轨迹基本确定,最优轨迹差异较小,g值较小,q值较大,加强蚁群在每次最优轨迹周围的寻优能力。通过对比蚁群算法迭代图7和改进蚁群算法迭代图8,可以看出无论时迭代的最优轨迹还是种群的平均轨迹,改进蚁群算法在寻优能力上明显比普通蚁群算法效果好。改进蚁群算法种群在迭代过程中,始终向着最优轨迹聚集最终迭代140次后收敛于最优值264,反观传统蚁群算法在迭代120次后算法收敛于最优值281。
[0112]
进一步的,在本实施例中,本发明模拟了利用无人机给桥梁上定点监测的场景。并且针对二种不同参数配置,对轨迹规划的优劣进行数据分析,其中图10为配置1较优参数环境,图11为配置2较劣参数环境,具体实施步骤如下:
[0113]
步骤一:桥梁环境模型在算法一阶段进行模拟,栅格化空间数据保存在数据库中,桥梁模型图(120m*50m*50m)如图9所示;
[0114]
步骤二:制定无人机飞行约束规则,以及算法参数初始化(配置1,配置2);
[0115]
步骤三:在桥梁模型上模拟设置无人机的4个中间观察节点步骤三:在桥梁模型上模拟设置无人机的4个中间观察节点其中为基站。在对轨迹规划算法独立运行30次后进行数据分析,这里给出了配置1和配置2下的可视化轨迹图10和图11所示,数据分析如表1所示。其中,f
length
为轨迹长度,f
range
为轨迹幅度,f
ave-value
为平均轨迹适应度,f
best-value
为最佳的轨迹适应度;
[0116]
表1轨迹数据分析表
[0117][0118]
从图8,图9中可以明显看出,配置1的轨迹相比较于配置2较为平滑,前后幅度差变化小。配置2的轨迹存在锯齿状,以及一些明细凸起变化。从表1数据中可以看出,配置1在最
佳轨迹适应度和平均轨迹适应度都有明显降低,轨迹较优。
[0119]
(1)本发明结合了利用无人机给桥梁监测的场景,给出了具体的空间障碍环境建模过程。并针对三维桥梁环境建模;给出最终的建模模型,同时考虑了桥梁中桥柱,桥墩等空间障碍物的影响。
[0120]
(2)本发明在蚁群算法的基础上引入了增强因子g和动态信息素强度q,使算法在前期保持了较高的空间搜索能力;到了后期会加速算法收敛。
[0121]
(3)本发明提出了一种空间环境下的无人机轨迹的优化目标函数,通过设置不同的权重因子动态调整优化目标。最后在保障无人机安全的前提下,使轨迹长度和幅度明显降低。
[0122]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。