1.本发明涉及一种针对于具有执行器故障和内部参数摄动的农用无人机系统,设计基于预定性能函数的自适应滑模容错控制算法,属于不确定性非线性系统的鲁棒容错控制技术领域。
背景技术:
2.近年来,随着通讯技术,人工智能技术,板载计算机技术等行业水平的快速发展,多旋翼无人机技术也有了极大的提高。因为具有适用范围广,结构简单,成本低,使用方便等优点,旋翼无人机无论是在军用还是民用领域都备受关注,并在搜救,监控,货物运送等多个方面投入使用。用于播撒农药、化肥等物的农用无人机因为效率高,人工成本少,已成为当下研究的一大热门。然而,特殊的工作环境和长时间的工作需求都使得农用无人机容易出现故障,即便是微小的故障也可能引发坠机、碰撞等严重事故,从而导致财产损失甚至人员伤亡。因此,农用无人机的容错控制变得十分重要,并成为目前的研究重点。
3.容错控制总体上分为主动容错和被动容错,被动容错主要是针对预先估计的某些类型故障设计特定的控制器,提高系统的鲁棒性,确保故障发生时还能保持稳定。被动容错不需要故障诊断和系统重构,其容错能力也有限。主动容错控制方法是通过诊断模块在线获取故障信息,再根据所获信息对系统进行重构,调整控制器的参数与结构。与被动容错相比,主动容错的应用范围更广,并且不需要通过降低控制性能来完成容错,因此,主动容错控制具有更加明显的优势,目前所受关注较多。
4.执行器失效故障是一种常见的无人机故障,近些年,学者们针对具有执行器失效故障的无人机提出了很多实用的容错控制算法,如滑模控制,反步法控制,模型预测控制等等。滑模控制算法在处理内部参数摄动、不确定性和系统故障时具有很好的鲁棒性,所以在很多容错控制算法中都有所使用。
5.然而,与一般的飞行器不同的是,农用无人机在实际飞行中需要播撒农药、化肥等物,其总质量和转动惯量的变化是不得不考虑的一个问题。为削弱参数的摄动和不确定性带来的影响,有学者引入了自适应方法,在线估计变动的参数。除此之外,由于农用无人机工作环境复杂,为避免发生碰撞、摩擦,造成机体损伤,其飞行轨迹需要有一个约束范围,确保无人机不会飞离安全区域。为处理状态约束的问题,有研究人员提出了预定性能函数的方法。通过构造预定性能函数,变量设置边界,并完成误差转换,将有约束的问题转换为无约束问题。将预定性能函数与滑模控制相结合可以有效处理农用无人机的执行器故障和状态约束。目前,已有许多学者在做此方面的研究。
技术实现要素:
6.发明目的:针对上述研究背景,提出了一种针对播撒农药的农用无人机系统设计的基于预定性能函数的自适应滑模容错控制算法。设计了rbf神经网络观测器在线获取准确的故障值。为保障更快的收敛速度和鲁棒性,设计了非奇异快速终端滑模面取代传统滑
模面。考虑到农用无人机在播撒农药、化肥等物时发生的参数摄动的问题,引入自适应控制思想在线估计飞行器的质量和转动惯量。为了保障安全,提高控制性能,设计了预定性能函数,通过误差转换给系统状态规定了约束边界,避免了无人机在工作过程中超调量过大,飞出安全区域,发生碰撞的危险。
7.技术方案:一种新型的针对具有执行器故障的播撒农药的农用无人机的自适应滑模容错控制方法。其特征在于:先通过rbf神经网络观测器在线逼近准确的故障信息;完成系统解耦,并设计预定性能函数和相应的误差转换规定位移子系统的状态边界;基于故障信息设计非奇异快速终端滑模代替传统滑模面,提高系统的收敛速度和鲁棒性;设计自适应律估计不确定的参数,最终构成容错控制器,包括如下具体步骤:
8.步骤1)确定无人机系统的故障模型,包括如下步骤:
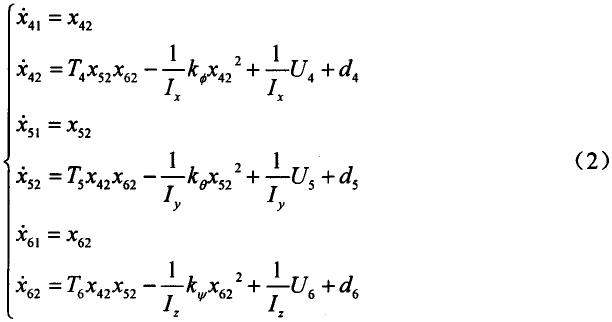
9.步骤1.1)确定系统模型,系统的位移子系统和姿态子系统如式(1),(2)所示:
[0010][0011][0012]
其中,x
i1
=(x,y,z,φ,θ,ψ)
t
和x
i2
=(u,v,w,p,q,r)
t
分别表示四旋翼无人机在t时刻的位置和速度状态;ui(t)为输入的控制量;di为质量变化引起的扰动与外部干扰之和,满足且d(t)=[d1,d2,d3,d4,d5,d6]w,和是已知常数;ki(i=φ,θ,ψ)为空气阻力系数;m和ji(i=x,y,z)是连续变量,分别表示无人机连同负载的总质量和转动惯量;
[0013]
步骤1.2)确定故障模型,已知ui(t)为第i个通道的控制输入,当第i个通道发生执行器失效故障时,控制输入为如式(3)所示:
[0014][0015]
其中,σi表示第i个通道的失效率,并且满足0≤σi<1;当σi=0时,第i
个通道正常工作,当0<σi<1时,第i个通道发生部分失效但还在继续工作;
[0016]
步骤1.3)确定故障信息,将发生故障后的系统模型写成状态空间的形式:
[0017][0018]
其中,f(x2)为系统的非线性部分,u为控制向量,b为控制系数矩阵,d(t)为有界扰动,e(t)=diag{σ1,σ2,...,σ6}为失效矩阵,示执行器的失效率;
[0019]
利用神经网络逼近失效矩阵,如式(5)所示:
[0020]
e(t)=wσ
t
φσ
(
x2) ε
σ
ꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0021]
其中,w
σ
∈rq×6为权重矩阵,满足φ
σ
∈rq表示基函数,ε
σ
∈r6表示重构误差,q表示隐藏层数,因此,式(4)可写作:
[0022][0023]
针对式(6)构造如下输出观测器:
[0024][0025]
其中,和分别为x2(t),d(t),w
σ
,和ε
σ
的观测值;l为赫尔维兹矩阵;根据式(1),(2)无人机的模型,求出一个正常数ξ,使其满足下式:
[0026][0027]
并据此配置一个正定矩阵q,使其满足lq ql 2ξq<0,定义系统观测值的自适应更新律和扰动补偿项如下:
[0028][0029][0030]
其中,k1,k2,k3,k4表示增益,为正常数,和分别为和的上界,由此可收敛获取准确的故障信息,从而完成重构;
[0031]
步骤2)确定约束条件,考虑到农用无人机在实际飞行中,工作环境复杂,容易发生碰撞或摩擦,需要对其位置状态进行约束,约束条件如式(11)所示:
[0032][0033]
其中,ki和分别为下界和上界,定义跟踪误差为:
[0034][0035]
其中x
id
(i=1,2,3)为设定的期望轨迹,根据公式(11),(12)针对跟踪误差设计性能函数如式(13)所示:
[0036][0037]
其中,ρ
i0
、ρ
i∞
、κi和都是正常数;
[0038]
对跟踪误差设置如下转换:
[0039][0040]
对其取逆得:
[0041][0042]
其中
[0043]
步骤3)设计位移子系统滑模面:
[0044]
根据需求设计滑模面函数,为使得农用无人机的位移状态不违背约束条件,需确保转换误差ηi收敛,故设计的滑模面如式(16)所示:
[0045][0046]
其中,k
i1
和k
i2
为正常数,为避免奇异性,αi和βi满足1<βi<2且βi<αi;sign(
·
)是符号函数,即:
[0047][0048]
步骤4)设计位移子系统容错控制律:
[0049]
采用自适应方法来估计无人机机体连同负载的总质量,滑模控制律由等效控制律和切换控制律两部分组成,即:
[0050]
ui=u
ieq
u
isw
ꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0051]
令滑模面的导数为零,求得等效控制律如下:
[0052][0053]
切换控制律如式(20)所示:
[0054][0055]
其中,σi的值由观测器获得;表示总质量m在对应的控制律中的估计值,且满足hi被定义为表示di的上界;δi表示增益,δi和qi均为正常数;
[0056]
步骤5)设计姿态子系统控制器设计,包括如下步骤:
[0057]
步骤5.1)设计滑模面:
[0058]
与步骤2和3类似,定义姿态子系统误差为:
[0059][0060]
设计如下滑模面:
[0061][0062]
其中,x
id
(i=4,5,6)为设定的期望轨迹;k
i1
和k
i2
为正常数;αi和βi满足1<βi<2且βi<αi;sign(
·
)是符号函数;
[0063]
步骤5.2)设计容错控制律:
[0064]
采用自适应方法来估计部分参数值,与步骤4中构造方法类似,设计容错控制律如式(23)所示:
[0065][0066]
其中τi定义如式(24)所示:
[0067][0068]
其中,σi的值由观测器获得;和分别为ii和ti的估计值,且满足的估计值,且满足i,j,k各不相同(例如:i=4时,j=5,k=6);表示di的上界;δi和ci表示增益,ci、δi和qi均为正常数;
[0069]
步骤6)根据喷洒农药的农用无人机系统的运行状态,选择合适的参数,完成对其的容错控制。
[0070]
有益效果:针对执行器失效故障下的农用无人机系统,设计了一种结合预定性能函数的自适应滑模容错控制方法。设计rbf神经网络观测器用于逼近准确的故障值,完成系统重构。构建快速终端滑模面取代传统滑模,提高收敛速度和鲁棒性。针对播撒农药过程中参数摄动的问题,设计自适应律在线估计参数值。在位移子系统中设计预定性能函数规定了飞行轨迹的边界,防止因超调量过大导致无人机飞离安全区域发生碰撞;具有如下具体优点:
[0071]
(1)设计的rbf神经网络观测器可以准确地逼近故障信息,对常值故障和时变故障都有较好的跟踪性能,可以据此完成系统重构,滑模控制器本身具有较强的鲁棒性,这使得系统在处理故障和扰动时有更好的效果;
[0072]
(2)根据跟踪误差,用非奇异快速终端滑模面替代传统滑模面,提高了收敛速度和鲁棒性,使控制器具有更好的动态性能;
[0073]
(3)考虑了播撒农药过程中参数慑动的问题,并引入自适应控制方法,在线估计无人机质量和转动惯量,使得控制器的控制精度更高,也更符合实际情况;
[0074]
(4)在位移子系统中设计预定性能函数,完成误差转换,使得位移子系统有约束边界,防止出现超调量过大的情况,从而避免了发生碰撞的危险。
[0075]
本发明所提方法作为一种针对具有执行器失效故障的农用无人机系统的自适应
滑模容错控制方法,具有一定的应用意义,易于实现,实时性好,准确性高,能够有效提高控制系统安全性且可操作性强,节省时间,效率更高,可广泛应用于播撒农药的农用无人机系统的执行器故障容错控制中。
附图说明
[0076]
图1是本发明方法的流程图;
[0077]
图2是quanser公司研制的实验装置qball-x4四旋翼飞行器;
[0078]
图3是qball-x4结构简化示意图;
[0079]
图4是qball-x4无人机执行器故障时x轴位置误差跟踪曲线图;
[0080]
图5是qball-x4无人机执行器故障时y轴位置误差跟踪曲线图;
[0081]
图6是qball-x4无人机执行器故障时z轴位置误差跟踪曲线图;
[0082]
图7是qball-x4无人机执行器故障时姿态误差跟踪曲线图;
具体实施方式
[0083]
下面结合附图对本发明做更进一步的解释。
[0084]
如图1所示,一种针对具有执行器故障的农用四旋翼无人机的滑模容错控制方法,其特征在于:在播撒农药的农用无人机系统发生执行器失效故障时,提出一种结合预定性能函数的非奇异快速终端滑模容错控制方法,使得无人机系统在发生执行器故障后能够正常运行,并使误差的最大超调量在一定范围内从而约束飞行轨迹防止发生碰撞;然后设计自适应律在线估计无人机的质量和转动惯量,削弱播撒农药导致系统参数摄动的影响,最终构成容错控制器,包括如下具体步骤:
[0085]
步骤1)确定无人机系统的故障模型,包括如下步骤:
[0086]
步骤1.1)确定系统模型,系统的位移子系统和姿态子系统如式(1),(2)所示:
[0087]
[0088][0089]
其中,x
i1
=(x,y,z,φ,θ,ψ)
t
和x
i2
=(u,v,w,p,q,r)
t
分别表示四旋翼无人机在t时刻的位置和速度状态;ui(t)为输入的控制量;di为质量变化引起的扰动与外部干扰之和,满足且d(t)=[d1,d2,d3,d4,d5,d6]
t
,和是已知常数;ki(i=φ,θ,ψ)为空气阻力系数;m和ji(i=x,y,z)是连续变量,分别表示无人机连同负载的总质量和转动惯量;
[0090]
步骤1.2)确定故障模型,已知ui(t)为第i个通道的控制输入,当第i个通道发生执行器失效故障时,控制输入为如式(3)所示:
[0091][0092]
其中,σi表示第i个通道的失效率,并且满足0≤σi<1;当σi=0时,第i个通道正常工作,当0<σi<1时,第i个通道发生部分失效但还在继续工作;
[0093]
步骤1.3)确定故障信息,将发生故障后的系统模型写成状态空间的形式:
[0094][0095]
其中,f(x2)为系统的非线性部分,u为控制向量,b为控制系数矩阵,d(t)为有界扰动,e(t)=diag{σ1,σ2,...,σ6}为失效矩阵,示执行器的失效率;
[0096]
利用神经网络逼近失效矩阵,如式(5)所示:
[0097]
e(t)=w
σt
φ
σ
(x2) ε
σ
ꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0098]
其中,w
σ
∈rq×6为权重矩阵,满足φ
σ
∈rq表示基函数,ε
σ
∈r6表示重构误差,q表示隐藏层数,因此,式(4)可写作:
[0099][0100]
针对式(6)构造如下输出观测器:
[0101][0102]
其中,和分别为x2(t),d(t),w
σ
,和ε
σ
的观测值;l为赫尔维兹矩阵;根据式(1),(2)无人机的模型,求出一个正常数ξ,使其满足下式:
[0103][0104]
并据此配置一个正定矩阵q,使其满足lq ql 2ξq<0,定义系统观测值的自适应更
新律和扰动补偿项如下:
[0105][0106][0107]
其中,k1,k2,k3,k4表示增益,为正常数,和分别为和的上界,由此可收敛获取准确的故障信息,从而完成重构;
[0108]
步骤2)确定约束条件,考虑到农用无人机在实际飞行中,工作环境复杂,容易发生碰撞或摩擦,需要对其位置状态进行约束,约束条件如式(11)所示:
[0109][0110]
其中,ki和分别为下界和上界,定义跟踪误差为:
[0111][0112]
其中x
id
(i=1,2,3)为设定的期望轨迹,根据公式(11),(12)针对跟踪误差设计性能函数如式(13)所示:
[0113][0114]
其中,ρ
i0
、ρ
i∞
、hi、κi和都是正常数;
[0115]
对跟踪误差设置如下转换:
[0116][0117]
对其取逆得:
[0118][0119]
其中
[0120]
步骤3)设计位移子系统滑模面:
[0121]
根据需求设计滑模面函数,为使得农用无人机的位移状态不违背约束条件,需确保转换误差ηi收敛,故设计的滑模面如式(16)所示:
[0122][0123]
其中,k
i1
和k
i2
为正常数,为避免奇异性,αi和βi满足1<βi<2且βi<αi;sign(
·
)是符号函数,即:
[0124][0125]
步骤4)设计位移子系统容错控制律:
[0126]
采用自适应方法来估计无人机机体连同负载的总质量,滑模控制律由等效控制律和切换控制律两部分组成,即:
[0127]
ui=u
ieq
u
isw
ꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0128]
令滑模面的导数为零,求得等效控制律如下:
[0129][0130]
切换控制律如式(20)所示:
[0131][0132]
其中,σi的值由观测器获得;表示总质量m在对应的控制律中的估计值,且满足hi被定义为表示di的上界;δi表示增益,δi和qi均为正常数;
[0133]
步骤5)设计姿态子系统控制器设计,包括如下步骤:
[0134]
步骤5.1)设计滑模面:
[0135]
与步骤2和3类似,定义姿态子系统误差为:
[0136][0137]
设计如下滑模面:
[0138][0139]
其中,x
id
(i=4,5,6)为设定的期望轨迹;k
i1
和k
i2
为正常数;αi和βi满足1<βi<2且βi<αi;sign(
·
)是符号函数;
[0140]
步骤5.2)设计容错控制律:
[0141]
采用自适应方法来估计部分参数值,与步骤4中构造方法类似,设计容错控制律如式(23)所示:
[0142][0143]
其中τi定义如式(24)所示:
[0144][0145]
其中,σi的值由观测器获得;和分别为ii和ti的估计值,且满足的估计值,且满足i,j,k各不相同(例如:i=4时,j=5,k=6);表示di的上界;δi和ci表示增益,ci、δi和qi均为正常数;
[0146]
步骤6)根据喷洒农药的农用无人机系统的运行状态,选择合适的参数,完成对其的容错控制。
[0147]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
[0148]
表1:qball-x4机体参数数值表
[0149]
参数名称值m0机体质量2kgω执行器带宽15rad/si
z0
偏航转动惯量0.08kg
·
m2i
x0
横滚转动惯量0.04kg
·
m2i
y0
俯仰转动惯量0.04kg
·
m2im螺旋桨转动惯量0.000132kg
·
m2d机身半径(1/2轴距)0.2mtm电机响应时间常数0.0116s
[0150]
下面以实际案例仿真说明实施方案的有效性。
[0151]
为验证方法的有效性,采用的仿真对象为加拿大quanser公司研制的四旋翼无人机控制的实验装置qball-x4四旋翼无人机,在该无人机上验证提出方法的合理性和有效性。qball-x4实验主体如图2所示,表1位qball-x4的机体参数。
[0152]
将四旋翼无人机qball-x4的结构简化为如图3所示。使用x型机架并建立机体坐标系q
b-xbybzb和地面坐标o
e-xeyeze。通常,四旋翼无人机系统存在六维度变量即(x,y,z,ψ,θ,φ),其中x,y,z为位置变量,ψ、θ和φ分别为偏航角、俯仰角和滚转角。ω=[p,q,r]
t
和v=[u,v,w]
t
分别表示角速度和线速度。
[0153]
根据牛顿-欧拉公式,可引入系统的动力学方程:
[0154][0155]
其中,k
φ
,k
θ
,k
ψ
为拉力系数;g为重力加速度;m表示无人机和负载的总质量;ji(i=x,y,z)表示总转动惯量;系统控制量的定义如下:
[0156][0157][0158]
其中,fi(i=1,2,3,4)和τi(i=1,2,3,4)分别为螺旋桨的拉力和扭矩。
[0159]
设定初始姿态角和位置分别为θ(0)=[0,0,0]
t
,p(0)=[-0.6,1.2,0]
t
;初始线速度和旋转角速度均为零;期望值为:[xd,yd,zd,ψd]
t
=[0.8sin(0.1πt),0.8cos(0.1πt),0.2t,π/3]
t
;设置上限为的白噪声作为外部扰动;为模拟播撒农药的场景,无人机负载的质量如式(4)所示:
[0160][0161]
系统的总质量为:m=m0 ρ;并以滚转通道为例,从第12s开始注入40%的失效故障,即e=diag{0,0,0,0.4,0,0};根据农用无人机实际工作情况,设置飞行轨迹边界,我们把预定性能函数中参数设置为:κi=1,ρ
i0
=0.71,ρ
i∞
=0.18,hi=0.75;观测器中参数设置为:ξ=4.35,k1=1,k2=5,k3=0.5,k4=3;控制律中的参数设定为:αi=2,βi=1.67,k
i1
=1,k
i2
=1,p=3.5;自适应律中增益设置为:[c4,c5,c6]
t
=[1.2,1.2,1]
t
,[δ1,δ2,δ3,δ4,δ5,δ6]
t
=[0.3,0.3,0.5,0.6,0.6,0.7]
t
。
[0162]
此案例仿真结果表明,本发明所提出的针对带有执行器故障的农用无人机系统的自适应滑模容错算法,可以很好的处理内部参数摄动和故障问题,取得了良好的控制效果,并且控制律具有较好的动态性能。与传统的自适应滑模控制进行对比,无人机机体在本案例仿真所提出的控制算法的作用下,具有更好的控制性效果。图4-6为发生执行器故障和质量变动情况下在x,y,z方向上的位移跟踪误差曲线,图7为该情况下无人机的姿态跟踪误差曲线。
[0163]
仿真结果表明,本发明所设计的针对含有执行器故障的农用无人机系统自适应滑模容错控制算法能够对内部参数摄动和执行器失效故障具有较强的鲁棒性,控制律的收敛具有快速性和准确性,同时可以很好地抑制超调量,提高动态控制性能。从图中可以看出,发生故障时,传统的滑模方法可以实现收敛,但超调量较大,不能控制在约束范围内,且针对质量变化的情况无法做出有效的调整;本案例所提出的方法鲁棒性更强,对质量变化的敏感度更低,收敛速度更快,同能满足合约束条件,效果更为优秀。综上,对用于播撒农药的农用无人机系统发生执行器故障,本案例仿真的容错控制方法行之有效。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。