1.本发明涉及一种动态障碍物场景下微型无人机集群算法的实验系统,属于无人机技术领域。
背景技术:
2.随着无人机技术的逐渐成熟,单个无人机在航拍摄影、农业植保等领域已经获得了广泛的应用。近些年,无人机领域开始呈现出微型化和集群化的发展趋势。相比于常规尺寸的无人机,微型无人机体型小、噪音低、控制灵活,能够自由穿梭于各类狭窄场景,且隐蔽性较强,因此在监视侦查方面具有应用潜力。无人机集群能够弥补单一无人机执行复杂任务时效率低、感知范围受限、载荷和续航能力不足等缺陷,其通过集群内部无人机之间的协调实现整个系统作业能力的提升。微型无人机集群综合了微型无人机和无人机集群的优势,能够高效执行狭窄场景中的任务,且当部分个体发生故障时依然存在替代方案,从而提高了系统的容错性能。
3.针对微型无人机集群设计的相关算法包括感知算法、协同控制算法、路径规划算法、智能搜索算法、智能决策算法等,这些算法重点研究的问题之一,就是当微型无人机集群位于动态障碍物场景下,算法能够使微型无人机与环境障碍物以及其他微型无人机不发生碰撞的同时,依然能够完成预定任务目标。该问题极具现实意义,例如多个微型无人机穿梭于人群中。为检验这类算法的有效性,需要设计一种提供动态障碍物场景的、适用于微型无人机集群的实验系统。
4.现有的用于检验无人机集群算法性能的实验平台中,绝大多数仅支持设置静态障碍物场景,对于少部分存在动态障碍物的实验平台,满足以下2种情形之一:(1)动态障碍物运动状态不可控,例如将抛起的球体、行人的腿部视为动态障碍物;(2)将动态障碍物选取为或者固连于运动状态可控的物体,例如直接将同类型的无人机视为动态障碍物。在上述的2种情形中,动态障碍物的控制精度均难以到达预期性能,同时也具有设置不够灵活的缺陷。再者,微型无人机由于尺寸微小,采用运动捕捉系统定位的方式,难以在保障检测范围的同时,分辨出微型无人机上粘贴的多个反光标记球。
技术实现要素:
5.针对现有无人机集群实验平台存在障碍物控制精度低、设置不够灵活的问题,本发明提供一种动态障碍物场景下微型无人机集群算法的实验系统及实验方法。
6.本发明的一种动态障碍物场景下微型无人机集群算法的实验系统,包括实验平台框架、视觉定位装置、固定阵列、滑动阵列、动态障碍物、微型无人机集群和上位机;固定阵列、滑动阵列设置在实验平台框架内,固定阵列为实验时微型无人机集群的起始终止区域和无障碍穿行区域,动态障碍物设置在滑动阵列上,滑动阵列能够带动动态障碍物移动,滑动阵列为微型无人机集群的动态障碍物的穿行区域;
7.视觉定位装置位于实验平台框架的上方,用于实时获取实验平台框架内的动态障
碍物和微型无人机集群的图像,并发送给上位机,上位机根据图像获取动态障碍物和微型无人机集群的位置和姿态,并发送至各微型无人机,各微型无人机间通信。
8.作为优选,所述滑动阵列包括推拉把手、滑动阵列平板和导轨;所述滑动阵列平板为多个平板拼接在一起;
9.导轨固定于阵列框架上,滑动阵列平板设置在导轨上方,且与导轨滑动连接,推拉把手与滑动阵列平板的一端固定连接,多个动态障碍物分布固定在滑动阵列平板的上表面,通过推拉把手带动滑动阵列平板上的动态障碍物在轨道上滑动。
10.作为优选,所述滑动阵列还包括横梁和两个滑块;
11.导轨依次穿过所述两个滑块的凹槽,从而使得滑块能够沿着导轨移动;所述横梁固定于两个滑块上方;所述滑动阵列平板固定在横梁的上方,所述推拉把手16固定于横梁的一端。
12.作为优选,包括多个滑动阵列,多个滑动阵列分布在实验平台框架内,多个滑动阵列中的两个或两个以上把手通过连接梁固定。
13.作为优选,所述固定阵列包括固定阵列平板、横梁和两个支架;所述固定阵列平板为多个平板拼接在一起;
14.所述两个支架固定于实验平台框架内,所述横梁固定于两个支架的凹槽内,所述固定阵列平板固定放置于横梁的上方,用于支撑降落的微型无人机。
15.作为优选,所述视觉定位装置包括龙门架、相机固定件和相机;
16.龙门架固定在实验平台框架上方,相机通过相机固定件固定在龙门架上。
17.作为优选,龙门架包括龙门横梁、两个龙门竖梁和两个龙门板;
18.龙门横梁架在两个龙门竖梁的顶端,龙门横梁能在两个龙门竖梁上滑动,相机通过相机固定件固定在龙门横梁上,两个龙门竖梁的底端各通过一个龙门板与下方的实验平台框架连接。
19.作为优选,所述实验平台框架包括阵列框架、纵向围栏和横向围栏;
20.所述阵列框架固定于龙门架的下方,所述纵向围栏固定于阵列框架的纵向侧边,用于限制微型无人机集群的纵向运动,所述横向围栏固定于阵列框架2的横向侧边,用于限制微型无人机集群和动态障碍物的横向运动。
21.作为优选,微型无人机的螺旋桨设置在机架的下方,无人机的机架顶部设置有二维码贴板,所述二维码贴板印有用于识别无人机身份的二维码。
22.本发明还提供一种上述实验系统的实验方法,包括:
23.s1、根据实验要求,选用固定阵列和滑动阵列,调整推拉把手设置,调整视觉定位装置的高度使视野覆盖任务区域,并将微型无人机集群和动态障碍物设置为初始状态;
24.s2、移动推拉把手,使障碍物保持为期望的运动状态,同时微型无人机飞行;
25.在微型无人机飞行过程中,视觉定位装置拍摄实时图像,上位机根据图像获得动态障碍物和微型无人机的实时位置和姿态,将其作为反馈信息发送给微型无人机;微型无人机利用接收的反馈信息和其他微型无人机的数据,根据集群算法生成控制指令,进行自身飞行控制;
26.s3、当动态障碍物场景下微型无人机集群执行完既定任务后,保存实验数据,并分析算法性能。
27.本发明的有益效果,本发明的动态障碍物场景下微型无人机集群算法的实验系统,通过设置滑动阵列,实现了对障碍物的动态可控,具备对动态障碍物控制性能较高、设置灵活等优势,从而得到更加真实的模拟效果。通过固定阵列和滑动阵列的拼接,灵活界定了微型无人机集群的不同任务区域,包括起始终止区域、无障碍穿行区域和避障区域。通过单行推拉把手和双行推拉把手的可切换式设计,该平台能够方便地在动态障碍物独立运动和同步运动两种模式中切换,简化了操作复杂程度,拓展了实验系统的应用范围。通过螺旋桨盘下置、机架顶部中心放置二维码贴板,能够避免螺旋桨盘对视觉定位的干扰作用,从而增加了微型无人机的结构利用率,增加了系统的定位精度。本发明在较低的成本下实现了对动态障碍物和微型无人机集群的高精度视觉定位。相比于现有的技术方案,本发明尤其适用于轴距10厘米以内的微型无人机,以及长宽介于1米到3米的实验区域。本发明能够在动态障碍物场景下,有效检验微型无人机集群的多目标感知算法、协同控制算法、路径规划算法、智能搜索算法、智能决策算法的性能,且实物平台设计具有现实意义,有利于将检验的算法拓展至实际应用。本发明具有不同任务场景切换灵活、实现简单、利于算法之间的分析比较等优势。
附图说明
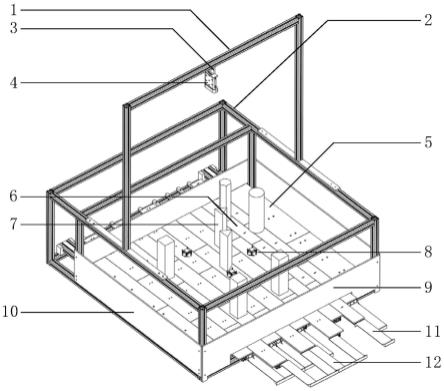
28.图1为本发明具体实施方式的整体结构图。
29.图2为图1中固定阵列5的结构图。
30.图3为图1中滑动阵列6的结构图。
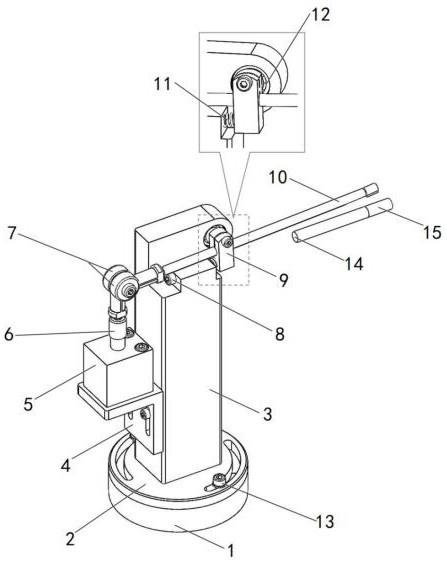
31.图4为图1中微型无人机8的结构图。
32.图5为图1中动态障碍物7的结构图。
33.图6为图1中双行推拉把手12的结构图。
34.图7为本发明具体实施方式实验方法的原理框图。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
37.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
38.本实施方式的动态障碍物场景下微型无人机集群算法的实验系统,包括实验平台框架、视觉定位装置、固定阵列、滑动阵列、动态障碍物、微型无人机集群和上位机;根据实验需求,将固定阵列和滑动阵列排布在实验平台框架内,固定阵列为实验时微型无人机集群的起始终止区域和无障碍穿行区域,滑动阵列为微型无人机集群的动态障碍物的穿行区域;动态障碍物设置在滑动阵列上,滑动阵列能够带动动态障碍物移动,实验时,通过控制滑动阵列的滑动,进而使动态障碍物保持为期望的运动状态;视觉定位装置位于实验平台框架的上方,用于实时获取实验平台框架内的动态障碍物和微型无人机集群的图像,发送
给上位机,上位机对图像进行处理得到动态障碍物和微型无人机集群的位置和姿态,并发送给各微型无人机,各微型无人机利用接收到的位置和姿态,并根据集群算法生成控制指令,进行自身飞行控制;完成任务后,保存无人机实验数据,分析算法性能。
39.如图1所示,本实施方式的实验平台框架包括阵列框架2、纵向围栏9和横向围栏10。本实施方式的阵列框架2固定于龙门架1的下方,材质为铝型材。纵向围栏9固定于阵列框架2的纵向侧边,从而限制微型无人机集群的纵向运动,纵向围栏9的材质为塑料,在其下方进行开口,确保滑动阵列6进行横向移动时不会与纵向围栏9发生干涉。横向围栏10固定于阵列框架2的横向侧边,从而限制微型无人机集群和动态障碍物7的横向运动,横向围栏10的材质为塑料。纵向围栏9和横向围栏10的端部紧贴,从而2个纵向围栏9和2个横向围栏10能够围成闭合的矩形实验区域。
40.如图1所示,本实施方式的视觉定位装置包括龙门架、相机固定件3和相机4。龙门架1包括龙门横梁、龙门竖梁、龙门板,材质为铝型材,其中龙门横梁可通过移动龙门竖梁上的螺柱螺母紧固位置来上下调节高度,实现对视觉定位装置高度的调整,进而使动态障碍物7和微型无人机集群在相机4的视野中无遮挡。
41.相机固定件3形状设计能够对相机4产生固定支撑作用。相机4选取分辨率较高的单目相机,例如工业相机或各类适用于移动机器人的相机,较优的实施方式为支持4k分辨率的kinect 3代相机。相比于运动捕捉系统定位的方式,本实施方式采用单目视觉定位的方式具有成本低廉、能够克服分辨率较低带来的无法分辨出贴在微型无人机上的多个反光标记球的问题。
42.本实施方式的视觉定位装置还可以采用事件相机,以提高对于微型无人机集群的运动状态信息的更新速率,从而提高定位准确性。
43.如图1和图2所示,本实施方式的固定阵列5包括固定阵列平板13、固定阵列横梁14和固定阵列支架15。根据微型无人机集群起始终止区域和无障碍物穿行区域的任务需求,固定阵列5可设置为多个。固定阵列支架15固定于阵列框架2,材质为铝合金,固定阵列横梁14横向固定于2个固定阵列支架15的凹槽内,材质为铝型材,固定阵列平板13固定放置于固定阵列横梁14的上方,从而对降落于上方的微型无人机8形成支撑作用。固定阵列平板13材质为塑料,且设置有若干贯穿孔,用于通过螺柱螺母紧固在固定阵列横梁14的上方。
44.如图1和图3所示,本实施方式的滑动阵列6包括推拉把手16、滑动阵列平板17、滑动阵列导轨18、滑动阵列滑块19和滑动阵列横梁20。根据微型无人机集群动态障碍物穿行区域的任务需求,滑动阵列6可设置为多个。滑动阵列导轨18横向固定于阵列框架2,并从滑动阵列滑块19的凹槽中间穿过,从而使得滑动阵列滑块19可沿着滑动阵列导轨18横向移动,滑动阵列导轨18和滑动阵列滑块19的材质均为铝合金。滑动阵列横梁20横向固定于2个滑动阵列滑块19上方,材质为铝型材。滑动阵列平板17固定放置于滑动阵列横梁20的上方,且平板上设置有若干贯穿孔,从而使动态障碍物7固定于滑动阵列平板17。滑动阵列平板17材质为塑料,且设置有若干贯穿孔,用于通过螺柱螺母紧固在滑动阵列横梁20的上方。推拉把手16固定于滑动阵列横梁20的一端,可通过人工或者电动等能够施加外力的方式带动推拉把手16移动。推拉把手16的较优的实施方式为钣金把手。通过上述设置,通过移动推拉把手16即可灵活操作动态障碍物7进行横向动态移动,移动推拉把手的操作可通过人工或电动装置来实现。
45.根据动态障碍物场景的任务需求,本实施方式的推拉把手16可设置为单行推拉把手11和双行推拉把手12。双行推拉把手12由2个单行推拉把手11和双行推拉把手连接梁28组成,2个单行推拉把手11之间通过双行推拉把手连接梁28连接,通过设置双行推拉把手连接梁28的长度,使得双行推拉把手12刚好能连接两行滑动阵列6。单行推拉把手11适用于该行滑动阵列6需要独立设置动态障碍物运动状态的情形,双行推拉把手12适用于多行滑动阵列6上的动态障碍物相对位置一致的情形,当3个及以上数量的滑动阵列6上动态障碍物相对位置需要保持一致时,将相邻2个双行推拉把手12的靠近侧的单行推拉把手11固定于同一个滑动阵列横梁20的一端,按照该方式进行级联即可。通过改变双行推拉把手12的长度、形状和朝向,可避免相互交错的双行推拉把手12在行程范围内移动时发生干涉。通过上述设置,能够实现多行动态障碍物相对位置需要保持一致、不需要保持一致2种场景下的灵活设置,且能够实现对动态障碍物的高性能控制。
46.如图1和图4所示,本实施方式的微型无人机8结构为桨盘下置的多旋翼无人机,整体尺寸能够满足在相邻动态障碍物7中穿过,实验区域内包含多个微型无人机8。微型无人机8由二维码贴板21、集控模块及电池放置舱22、机架23、电机24、螺旋桨25组成。机架23包括机身和若干根机臂,较优的实施方式为四根机臂,并且在机臂的外侧加装螺旋桨保护罩,具有结构简单、安全性高的优势。集控模块及电池放置舱22设置在微型无人机8的中心位置,包含通信模块、飞行控制模块、传感器模块以及电源模块,作为微型无人机8的运动控制装置和动力来源,其中通讯模块能够实现无人机和上位机之间、无人机和无人机之间发送和接收数据。电机24连接在机臂的末端,且朝下方倒置放置,螺旋桨25连接于电机24的下方。通过上述设置,能够确保螺旋桨25位于机架23的下方,而二维码贴板21放置于机架23的上方中心位置,因此微型无人机飞行时螺旋桨25不会对无人机定位造成干扰。二维码贴板21上印有用于识别无人机的标记二维码,较优的实施方式为apriltag标记码,具有形式简便、可调用开源定位库函数等优势。不同的微型无人机8采用不同的标记二维码,配合视觉定位装置即可获得微型无人机集群的精确位置。
47.本实施方式中的微型无人机还可以采用异构飞行器实现,进一步拓展实验研究系统可检验算法的范围;
48.如图1和图5所示,本实施方式的动态障碍物7由障碍物主体26、障碍物凸柱27组成。障碍物主体26根据任务需求可灵活设置为各种形状,附图5作为其中一个示例,给出三棱柱形状的动态障碍物。障碍物凸柱27由2根凸起的圆柱体组成,和滑动阵列6设置的贯穿孔适配,可从滑动阵列6上自由安装或拆卸。
49.如图7所示,本实施方式中的实验系统的实验方法,包括:
50.步骤一、根据实验要求,选用合适的固定阵列5和滑动阵列6,具体方式为若某区域属于微型无人机集群的起始终止区域或者无障碍物穿行区域,则在此处设置固定阵列5,若某区域属于微型无人机集群动态障碍物穿行区域,则在此处设置滑动阵列6。接着调整推拉把手16设置,具体方式为对于多行动态障碍物9的运动状态需要保持同步的情形,则将推拉把手16设置多个双行推拉把手12级联,对于多行障碍物9的运动状态需要单独设置的情形,则将推拉把手16设置为单行推拉把手11。接着调整视觉定位装置的高度使相机4的视野覆盖任务区域,并将微型无人机集群和动态障碍物7设置为初始状态,实施方式包括启动微型无人机8飞行至指定初始位置,以及调节推拉把手16使动态障碍物7到达指定初始位置;
51.步骤二、通过人工调节或者电力驱动的方式移动推拉把手16,使障碍物保持为期望的运动状态;
52.步骤三、视觉定位装置不断捕获图像发送给上位机,上位机的图像识别程序通过识别标记二维码的方式,获得动态障碍物7和微型无人机8的实时位置和姿态,将其作为反馈信息发送给微型无人机8的通讯模块;
53.步骤四、微型无人机8利用通讯模块与上位机和其他无人机接收和发送数据,整理为集群数据发送给飞行控制模块;
54.步骤五、飞行控制模块根据集群数据和集群算法,生成各个电机24的期望转速,并驱动电机24到达期望转速,从而实现飞行控制;
55.步骤六、当动态障碍物场景下微型无人机集群执行完既定任务后,将视觉定位装置的识别数据和微型无人机8的运行数据记录保存下来,用于分析比较算法性能。
56.虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他实施例中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。