1.本发明涉及有机肥料,更具体地说是一种生物有机肥料及其制备系统与制备方法。
背景技术:
2.有机肥,主要来源于植物或者动物,施于土壤以提供植物营养为其主要功能的含碳物料。经生物物质、动植物废弃物、植物残体加工而来,消除了其中的有毒有害物质,富含大量有益物质;现有技术在制备有机肥料的过程中,往往需要预先将植物或者动物的残骸进行破碎混合,在加入益生菌原液混合后进行无氧发酵,在无氧发酵的过程中,需要预先对原料进行包覆,形成无氧环境,现有技术中对生物有机肥料原料进行包覆多使用人工的方式,效率低下。
技术实现要素:
3.本发明的目的是提供一种生物有机肥料及其制备系统与制备方法,可以快速对有机肥料进行打包发酵。
4.本发明的目的通过以下技术方案来实现:
5.一种生物有机肥料制备系统,包括装置支架,装置支架上转动连接有装夹丝杆,装夹丝杆两端的螺纹旋向相反,装置支架上固定连接有驱动装夹丝杆进行转动的动力机构ⅰ,动力机构ⅰ优选为伺服电机,装置支架上转动连接有横移丝杆,装置支架上固定连接有驱动横移丝杆进行转动的动力机构ⅱ,动力机构ⅱ优选为伺服电机;
6.装置支架上滑动连接有两个装夹支架,两个装夹支架分别通过螺纹连接在装夹丝杆的两端,每个装夹支架上均转动连接有装夹轮;
7.每个装夹支架上均转动连接有两个拉扯轴,两个拉扯轴之间啮合传动,每个拉扯轴上均固定连接有拉扯轮,装夹支架上固定连接有驱动其中一个拉扯轴进行转动的动力机构ⅲ,动力机构ⅲ优选为伺服电机;
8.每个装夹支架上均转动连接有拉扯丝杆,装夹支架上固定连接有驱动拉扯丝杆进行转动的动力机构ⅳ,动力机构ⅳ优选为伺服电机;
9.每个装夹支架上均滑动连接有拉扯支架,拉扯支架通过螺纹连接在拉扯丝杆上,每个拉扯支架上均设置有两个拉扯带机构,两个拉扯带机构之间啮合传动,拉扯支架上固定连接有驱动其中一个拉扯带机构进行运动的动力机构
ⅴ
,动力机构
ⅴ
优选为伺服电机;
10.装置支架上滑动连接有横移支架,横移支架通过螺纹连接在横移丝杆上,横移支架上固定连接有第一伸缩机构,第一伸缩机构的伸缩端上固定连接有支撑底板,支撑底板的两侧均滑动连接有滑动侧板,两个滑动侧板的外端均转动连接有折叠侧板,每个滑动侧板上均固定连接有驱动折叠侧板进行转动的动力机构ⅵ,动力机构ⅵ优选为伺服电机,第一伸缩机构的伸缩端上固定连接有两个第二伸缩机构,两个第二伸缩机构的伸缩端分别固定连接在两个滑动侧板上;
11.每个折叠侧板上均设置有多个吸附孔,每个折叠侧板上均固定连接有连通腔体,多个吸附孔均和连通腔体连通,连通腔体上连接有吸附管道,吸附管道上设置有抽气泵;
12.装置支架上固定连接有两个第三伸缩机构,每个第三伸缩机构的伸缩端上均固定连接有切割刀具;
13.装置支架上固定连接有两个第四伸缩机构,每个第四伸缩机构的伸缩端上均固定连接有第五伸缩机构,每个第五伸缩机构的伸缩端上均固定连接有压合板,压合板的底部设置有加热丝,支撑底板上设置有两个加热槽,每个加热槽内均设置有加热机构。
14.一种生物有机肥料制备的方法,该方法包括以下步骤:
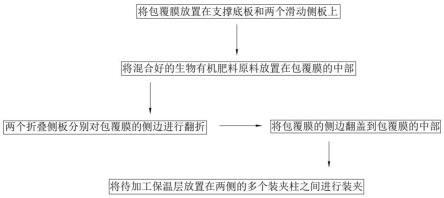
15.步骤一:将包覆膜放置在支撑底板和两个滑动侧板上;
16.步骤二:将混合好的生物有机肥料原料放置在包覆膜的中部;
17.步骤二:两个折叠侧板分别对包覆膜的侧边进行翻折,将包覆膜的侧边翻盖到包覆膜的中部,完成生物有机肥料原料的包覆。
18.一种生物有机肥料,该生物有机肥料的组分按照重量比例如下:益生菌原液1至2份;营养剂12至16份;谷糠14至15份;禽粪便22至26份;茎叶18至24份;锯末木屑16至18份。
附图说明
19.下面结合附图和具体实施方法对本发明做进一步详细的说明。
20.图1是本发明的生物有机肥料制备方法示意图;
21.图2是本发明的生物有机肥料制备系统结构示意图;
22.图3是本发明的生物有机肥料制备系统结构示意图;
23.图4是本发明的装夹支架结构示意图;
24.图5是本发明的出料轮结构示意图;
25.图6是本发明的装夹轮结构示意图;
26.图7是本发明的拉扯带机构结构示意图;
27.图8是本发明的支撑底板结构示意图;
28.图9是本发明的折叠侧板结构示意图;
29.图10是本发明的装置支架结构示意图。
30.图中:
31.装置支架11;装夹丝杆12;横移丝杆13;
32.装夹支架21;装夹轮22;拉扯丝杆23;
33.拉扯轴31;拉扯轮32;
34.拉扯支架41;拉扯带机构42;
35.横移支架51;第一伸缩机构52;支撑底板53;滑动侧板54;折叠侧板55;吸附孔56;连通腔体57;第二伸缩机构58;加热槽59;
36.第三伸缩机构61;切割刀具62;
37.第四伸缩机构71;第五伸缩机构72;压合板73;
38.缠绕筒80;包覆膜81。
具体实施方式
39.下面结合附图对本发明做进一步详细说明。
40.如图2至10所示,下面对一种生物有机肥料制备系统的结构和功能进行详细的说明;
41.一种生物有机肥料制备系统,包括装置支架11,装置支架11上转动连接有装夹丝杆12,装夹丝杆12两端的螺纹旋向相反,装置支架11上固定连接有驱动装夹丝杆12进行转动的动力机构ⅰ,动力机构ⅰ优选为伺服电机,装置支架11上转动连接有横移丝杆13,装置支架11上固定连接有驱动横移丝杆13进行转动的动力机构ⅱ,动力机构ⅱ优选为伺服电机;
42.装置支架11上滑动连接有两个装夹支架21,两个装夹支架21分别通过螺纹连接在装夹丝杆12的两端,每个装夹支架21上均转动连接有装夹轮22;
43.每个装夹支架21上均转动连接有两个拉扯轴31,两个拉扯轴31之间啮合传动,每个拉扯轴31上均固定连接有拉扯轮32,装夹支架21上固定连接有驱动其中一个拉扯轴31进行转动的动力机构ⅲ,动力机构ⅲ优选为伺服电机;
44.每个装夹支架21上均转动连接有拉扯丝杆23,装夹支架21上固定连接有驱动拉扯丝杆23进行转动的动力机构ⅳ,动力机构ⅳ优选为伺服电机;
45.每个装夹支架21上均滑动连接有拉扯支架41,拉扯支架41通过螺纹连接在拉扯丝杆23上,每个拉扯支架41上均设置有两个拉扯带机构42,两个拉扯带机构42之间啮合传动,拉扯支架41上固定连接有驱动其中一个拉扯带机构42进行运动的动力机构
ⅴ
,动力机构
ⅴ
优选为伺服电机;
46.装置支架11上滑动连接有横移支架51,横移支架51通过螺纹连接在横移丝杆13上,横移支架51上固定连接有第一伸缩机构52,第一伸缩机构52的伸缩端上固定连接有支撑底板53,支撑底板53的两侧均滑动连接有滑动侧板54,两个滑动侧板54的外端均转动连接有折叠侧板55,每个滑动侧板54上均固定连接有驱动折叠侧板55进行转动的动力机构ⅵ,动力机构ⅵ优选为伺服电机,第一伸缩机构52的伸缩端上固定连接有两个第二伸缩机构58,两个第二伸缩机构58的伸缩端分别固定连接在两个滑动侧板54上;
47.每个折叠侧板55上均设置有多个吸附孔56,每个折叠侧板55上均固定连接有连通腔体57,多个吸附孔56均和连通腔体57连通,连通腔体57上连接有吸附管道,吸附管道上设置有抽气泵;
48.装置支架11上固定连接有两个第三伸缩机构61,每个第三伸缩机构61的伸缩端上均固定连接有切割刀具62;
49.装置支架11上固定连接有两个第四伸缩机构71,每个第四伸缩机构71的伸缩端上均固定连接有第五伸缩机构72,每个第五伸缩机构72的伸缩端上均固定连接有压合板73,压合板73的底部设置有加热丝,支撑底板53上设置有两个加热槽59,每个加热槽59内均设置有加热机构;
50.使用时,将缠绕筒80放置在两个装夹轮22之间,启动动力机构ⅰ,动力机构ⅰ的输出轴开始转动,动力机构ⅰ的输出轴带动装夹丝杆12进行转动,装夹丝杆12转动时通过螺纹带动两个装夹支架21进行运动,两个装夹支架21相互靠近,进而带动两个装夹轮22相互靠近,两个装夹轮22对缠绕筒80进行装夹,缠绕筒80可以根据不同的使用需求设置成不同的宽度,包覆膜81可以根据不同的使用需求设置成不同的宽度,包覆膜81预先缠绕在缠绕筒80
上,两个装夹轮22可以对不同宽度的缠绕筒80进行装夹;
51.将包覆膜81伸出缠绕在位于两侧的两个拉扯轮32之间,当启动动力机构ⅲ时,动力机构ⅲ的输出轴带动拉扯轴31进行转动,两个拉扯轴31之间啮合传动,进而当启动一侧的动力机构ⅲ时,同一侧的两个拉扯轴31会同时进行转动,进而带动同一侧的两个拉扯轮32进行转动,两个拉扯轮32的转动方向相反,将包覆膜81推出,两侧的两个拉扯轮32同时进行转动,进而推动包覆膜81向前进行运动;
52.预先启动动力机构ⅳ,动力机构ⅳ的输出轴开始转动,动力机构ⅳ的输出轴带动拉扯丝杆23进行转动,拉扯丝杆23转动时通过螺纹带动拉扯支架41进行运动,使得拉扯支架41在装夹支架21上进行滑动,拉扯支架41带动其上的两个拉扯带机构42进行运动,拉扯带机构42可以是现有技术中的带传动机构,即两个带轮一个传动带,使得两个拉扯带机构42分别运动到两个拉扯轮32的前端,启动动力机构
ⅴ
,动力机构
ⅴ
的输出轴开始转动,动力机构
ⅴ
的输出轴带动拉扯带机构42进行运动,两个拉扯带机构42之间通过齿轮啮合传动,进而两个拉扯带机构42的运动方向相反,两个拉扯带机构42运动时,将包覆膜81收卷到两个拉扯带机构42之间,再启动动力机构ⅳ,动力机构ⅳ的输出轴开始转动,动力机构ⅳ的输出轴带动拉扯丝杆23进行转动,拉扯丝杆23转动时通过螺纹带动拉扯支架41进行运动,拉扯支架41带动两个拉扯带机构42向前进行运动,进而拉扯包覆膜81向前进行运动,使得包覆膜81铺设到支撑底板53上;
53.启动动力机构ⅱ,动力机构ⅱ的输出轴开始转动,动力机构ⅱ的输出轴带动横移丝杆13进行转动,横移丝杆13转动时通过螺纹带动横移支架51进行运动,使得横移支架51在装置支架11上进行横向滑动,进而横移支架51带动第一伸缩机构52、支撑底板53、滑动侧板54和折叠侧板55进行运动,进而调整支撑底板53、滑动侧板54和折叠侧板55的位置,满足不同的加工需求;
54.进一步的,启动第一伸缩机构52,第一伸缩机构52可以时液压缸或者电动推杆,第一伸缩机构52的伸缩端带动支撑底板53进行运动,进而调整支撑底板53的高度,使得支撑底板53和包覆膜81的下侧面接触,如图2所示;
55.启动两个第三伸缩机构61,第三伸缩机构61可以是液压缸或者电动推杆,第三伸缩机构61的伸缩端带动切割刀具62进行运动,其中一个第三伸缩机构61的伸缩端向上进行运动,另一个第三伸缩机构61的伸缩端向下进行运动,进而带动两个切割刀具62相互靠近,两个切割刀具62相互靠近对包覆膜81进行切割;
56.预先将生物有机肥料的原料进行破碎混合,放置在包覆膜81上,包覆膜81切割完成后,先启动一侧的动力机构ⅵ,动力机构ⅵ的输出轴带动折叠侧板55进行翻折转动,折叠侧板55对包覆膜81的侧边进行翻转,将包覆膜81的侧边翻转到包覆膜81的中部,对生物有机肥料的原料进行覆盖,启动一侧的第四伸缩机构71,第四伸缩机构71可以是液压缸或者电动推杆,第四伸缩机构71的伸缩端带动第五伸缩机构72向下进行运动,第五伸缩机构72带动压合板73向下进行运动,压合板73向下进行运动,对包覆膜81翻折的这边进行固定挤压,完成包覆膜81一侧翻折的固定,启动动力机构ⅵ,动力机构ⅵ的输出轴带动折叠侧板55进行运动,使得折叠侧板55复位;
57.在启动另一侧的动力机构ⅵ,动力机构ⅵ的输出轴带动对应的折叠侧板55进行运动,折叠侧板55对包覆膜81的另一个侧边进行翻折,使得包覆膜81的另一侧脱离两个拉扯
带机构42之间;
58.将包覆膜81的侧边翻转到包覆膜81的中部,对生物有机肥料的原料进行覆盖,启动另一侧的第四伸缩机构71,第四伸缩机构71伸缩端带动第五伸缩机构72向下进行运动,第五伸缩机构72带动压合板73向下进行运动,压合板73向下进行运动,对包覆膜81翻折的这边进行固定挤压,再启动第一次启动的第五伸缩机构72,第五伸缩机构72的伸缩端向上运动后再次向下进行运动,进而两侧的压合板73均完成对包覆膜81侧边的压合,包覆膜81的两侧完成对中部的折叠覆盖;
59.进一步的,两个压合板73的下端均设置有加热丝,加热槽59内设置有加热机构,加热机构和加热丝配合对包覆膜81进行热压,完成包覆膜81包覆的封口;
60.进一步的,可以根据不同的使用需求,启动第二伸缩机构58,第二伸缩机构58可以是液压缸或者电动推杆,第二伸缩机构58的伸缩端带动滑动侧板54进行运动,使得滑动侧板54在支撑底板53上进行滑动,滑动侧板54带动折叠侧板55进行运动,进而调整折叠侧板55的位置,进而调整折叠侧板55对包覆膜81侧边翻折的位置,进而当包覆膜81需要包覆的生物有机肥料原料变化时,适当的调整折叠侧板55的位置,满足不同的包覆需求;
61.进一步的,为了保证折叠侧板55可以带动包覆膜81的侧边进行运动,折叠侧板55上设置有多个吸附孔56,多个吸附孔56均和连通腔体57连通,连通腔体57上连接有吸附管道,吸附管道上设置有抽气泵,启动抽气泵,使得多个吸附孔56产生吸附力,对包覆膜81的侧边进行吸附,进而保证折叠侧板55可以带动包覆膜81的侧边进行运动,完成包覆;
62.进一步的,还可以启动第五伸缩机构72,第五伸缩机构72可以是液压缸或者电动推杆,第五伸缩机构72的伸缩端带动压合板73进行运动,进而调整压合板73的压合位置,满足不同的加工需求;
63.进一步的,当包覆膜81完成生物有机肥料原料的包覆后,将包覆膜81取下,放置在一边进行无氧发酵,启动动力机构ⅳ,动力机构ⅳ的输出轴带动拉扯丝杆23进行转动,拉扯丝杆23转动时通过螺纹带动拉扯支架41向后进行运动,使得拉扯带机构42再次运动到拉扯轮32的前侧,对包覆膜81进行拉扯,使得包覆膜81再次运动到支撑底板53的下侧准备下次加工;
64.一种生物有机肥料制备的方法,该方法包括以下步骤:
65.步骤一:将包覆膜81放置在支撑底板53和两个滑动侧板54上;
66.步骤二:将混合好的生物有机肥料原料放置在包覆膜81的中部。
67.步骤二:两个折叠侧板55分别对包覆膜81的侧边进行翻折,将包覆膜81的侧边翻盖到包覆膜81的中部,完成生物有机肥料原料的包覆。
68.一种生物有机肥料,该生物有机肥料的组分按照重量比例如下:益生菌原液1至2份;营养剂12至16份;谷糠14至15份;禽粪便22至26份;茎叶18至24份;锯末木屑16至18份。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。