1.本发明涉及交叉铺网技术领域,特别是交叉铺网小车控制方法、装置及可读存储介质。
背景技术:
2.交叉铺网机是无纺布生产线的核心设备,而铺网小车的铺网速度直接决定了整个设备生产最终产品的速度。
3.铺网小车在交叉铺网时,需要周期性频繁换向,由正向的匀速减速到零之后立即加速到反向的匀速,之后再周期性换向。铺网小车的凸轮运动曲线决定了铺网小车的最大动态值,包括最大速度、最大加速度等,这些动态值也决定了整个设备的最大生产速度。所以为了提升交叉铺网机的铺网速度,需要结合工艺优化铺网小车的凸轮运动曲线。
4.受到铺网小车的凸轮运动曲线的限制,目前交叉铺网机的铺网速度都不够高。
技术实现要素:
5.有鉴于此,本发明实施例一方面提出了交叉铺网小车控制方法、装置,以提高交叉铺网小车的铺网速度;另一方面提出了计算机可读存储介质、计算机程序产品和电子设备,以提高交叉铺网小车的铺网速度。
6.一种交叉铺网小车控制方法,该方法包括:
7.根据进料速度和每层的铺设宽度以及铺设总层数,确定每层的铺设时长;
8.将每层的铺设时长依次划分为7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段;
9.根据预设的加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例,确定这7个时间段中每个时间段的时长;
10.根据这7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值;
11.根据交叉铺网小车的凸轮运动的加加速度的最大值,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移;
12.将交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移发送给交叉铺网小车的伺服控制器,以使得交叉铺网小车的伺服控制器根据所述每一时刻的凸轮运动位移控制交叉铺网小车进行铺网。
13.所述加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例为:2:1:2:4:2:1:2。
14.所述根据这7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值,包括:
15.根据a
max
=j
max
t1,v
max
=-0.5j
max
t
32
0.5j
max
t
12
a
max
t2,以及,
16.计算j
max
;
17.其中,d为每层的铺设宽度,j
max
为交叉铺网小车的凸轮运动的加加速度的最大值,a
max
为交叉铺网小车的凸轮运动的加速度的最大值,v
max
为交叉铺网小车的凸轮运动的速度的最大值,t1为每层铺设时长中加加速段的时长,t2为每层铺设时长中匀加速段的时长,t3为每层铺设时长中减加速段的时长,t4为每层铺设时长中匀速段的时长,t5为每层铺设时长中加减速段的时长,t6为每层铺设时长中匀减速段的时长,t7为每层铺设时长中减减速段的时长。
18.当交叉铺网小车位于加加速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
19.计算
[0020][0021]
其中,0≤t≤t1,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0022]
当交叉铺网小车位于匀加速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0023]
计算
[0024][0025]
其中,t1≤t≤t1 t2,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0026]
当交叉铺网小车位于减加速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0027]
计算
[0028][0029]
其中,t1 t2≤t≤t1 t2 t3,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0030]
当交叉铺网小车位于匀速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0031]
计算
[0032][0033]
其中,t1 t2 t3≤t≤t1 t2 t3 t4,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0034]
当交叉铺网小车位于加减速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0035]
计算
[0036][0037]
其中,t1 t2 t3 t4≤t≤t1 t2 t3 t4 t5,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0038]
当交叉铺网小车位于匀减速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0039]
计算
[0040][0041]
其中,t1 t2 t3 t4 t5≤t≤t1 t2 t3 t4 t5 t6,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0042]
当交叉铺网小车位于减减速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0043]
计算
[0044][0045]
其中,t1 t2 t3 t4 t5 t6≤t≤t1 t2 t3 t4 t5 t6 t7,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0046]
所述加加速段、减加速段、加减速段和减减速段的加加速的绝对值相同。
[0047]
一种交叉铺网小车控制装置,该装置包括:
[0048]
单层铺设时长计算模块,用于根据进料速度和每层的铺设宽度以及铺设总层数,确定每层的铺设时长;
[0049]
子时间段划分模块,用于将每层的铺设时长依次划分为7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段;根据预设的加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例,确定这7个时间段中每个时间段的时长;
[0050]
加加速度最大值计算模块,用于根据所述7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值;
[0051]
位移计算模块,用于根据交叉铺网小车的凸轮运动的加加速度的最大值,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移;将交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移发送给交叉铺网小车的伺服控制器,以使得交叉铺网小车的伺服控制器根据所述每一时刻的凸轮运动位移控制交叉铺网小车进行铺网。
[0052]
一种非瞬时计算机可读存储介质,所述非瞬时计算机可读存储介质存储指令,所述指令在由处理器执行时使得所述处理器执行如上任一项所述的方法的步骤。
[0053]
一种计算机程序产品,包括计算机程序或指令,该计算机程序或指令被处理器执行时实现如上任一项所述的方法的步骤。
[0054]
一种电子设备,包括:处理器和存储器,其中:
[0055]
存储器存储有程序,所述程序配置为在被所述处理器执行时使得所述处理器执行如上任一项所述的方法的步骤。
[0056]
本发明实施例中,通过将交叉铺网小车在每层的铺设时长依次划分为7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段,并根据这7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值,根据交叉铺网小车的凸轮运动的加加速度的最大值,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,从而使得铺网小车的凸轮运动的速度曲线为s形的平滑曲线,减少了速度变化对铺网小车控制过程中的冲击,对于铺网小车的凸轮机的响应要求降低,并使整个铺网的插补过程更柔性,从而最终提高了交叉铺网小车的铺网速度。
附图说明
[0057]
下面将通过参照附图详细描述本发明的优选实施例,使本领域的普通技术人员更清楚本发明的上述及其它特征和优点,附图中:
[0058]
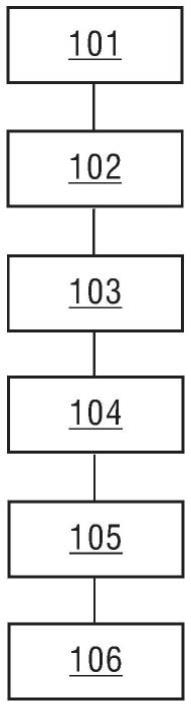
图1为本发明实施例提供的交叉铺网小车控制方法流程图;
[0059]
图2为本发明实施例中交叉铺网小车的凸轮运动的加速度曲线示意图;
[0060]
图3为本发明实施例中交叉铺网小车的凸轮运动的速度曲线示意图;
[0061]
图4为实际应用中,一铺网小车在某段时间内的凸轮运动的加速度曲线、速度曲线和位移曲线的示意图;
[0062]
图5为本发明实施例提供的交叉铺网小车控制装置的结构示意图。
[0063]
其中,附图标记如下:
[0064]
标号含义101-106步骤41凸轮运动的加速度曲线42凸轮运动的速度曲线43凸轮运动的位移曲线50交叉铺网小车控制装置51单层铺设时长计算模块52子时间段划分模块53加加速度最大值计算模块54位移计算模块
具体实施方式
[0065]
为使本发明的目的、技术方案和优点更加清楚,以下举实施例对本发明进一步详细说明。
[0066]
图1为本发明实施例提供的交叉铺网小车控制方法流程图,其具体步骤如下:
[0067]
步骤101:根据进料速度和每层的铺设宽度以及铺设总层数,确定每层的铺设时长。
[0068]
进料速度即输送铺网材料的速度。例如:若进料速度为20m/s(米/秒),每层的铺设宽度为5m(米),则铺网小车的铺网速度为4层/秒,则每层的铺设时长为0.25秒。
[0069]
步骤102:将每层的铺设时长依次划分为7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段。
[0070]
步骤103:根据预设的加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例,确定这7个时间段中每个时间段的时长。
[0071]
步骤104:根据这7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值。
[0072]
步骤105:根据交叉铺网小车的凸轮运动的加加速度的最大值,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移。
[0073]
步骤106:将交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移发送给交叉铺网小车的伺服控制器,以使得交叉铺网小车的伺服控制器根据所述每一时刻的凸轮运动位移控制交叉铺网小车进行铺网。
[0074]
上述实施例中,通过将交叉铺网小车在每层的铺设时长依次划分为7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段,并根据这7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值,根据交叉铺网小车的凸轮运动的加加速度的最大值,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,从而使得铺网小车的凸轮运动的速度曲线为s形的平滑曲线,减少了速度变化对铺网小车控制过程中的冲击,对于铺网小车的凸轮机的响应要求降低,并使整个铺网的插补过程更柔性,从而最终提高了交叉铺网小车的铺网速度。
[0075]
一可选实施例中,为了使得凸轮运动的速度曲线尽可能平滑,加加速段、减加速段、加减速段和减减速段的加加速的绝对值相同
[0076]
在实际应用中,可根据多次试验等确定加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例。例如:通常铺网车有最大加速度限制,则在不超过最大加速度的前提下,通过改变这7个时间段之间的时长比例,找到铺网车稳定、不震动时的最大速度,此时对应的这7个时间段之间的时长比例即为最佳比例。
[0077]
一可选实施例中,步骤103中,加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例为:t1:t2:t3:t4:t5:t6:t7=2:1:2:4:2:1:2,其中,t1为加加速段的时长,t2为匀加速段的时长,t3为减加速段的时长,t4为匀速段的时长,t5为加减速段的时长,t6为匀减速段的时长,t7为减减速段的时长。
[0078]
一可选实施例中,步骤104中,根据这7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值,包括:
[0079]
根据a
max
=j
max
t1,v
max
=-0.5j
max
t
32
0.5j
max
t
12
a
max
t2,以及,
[0080][0080][0080]
计算j
max
;
[0081]
其中,d为每层的铺设宽度,j
max
为交叉铺网小车的凸轮运动的加加速度的最大值,a
max
为交叉铺网小车的凸轮运动的加速度的最大值,v
max
为交叉铺网小车的凸轮运动的速度的最大值,t1为每层铺设时长中加加速段的时长,t2为每层铺设时长中匀加速段的时长,t3为每层铺设时长中减加速段的时长,t4为每层铺设时长中匀速段的时长,t5为每层铺设时长
中加减速段的时长,t6为每层铺设时长中匀减速段的时长,t7为每层铺设时长中减减速段的时长。
[0082]
一可选实施例中,当交叉铺网小车位于加加速段时,步骤105中,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0083]
计算
[0084][0085]
其中,0≤t≤t1,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0086]
一可选实施例中,当交叉铺网小车位于匀加速段时,步骤105中,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0087]
计算
[0088][0089]
其中,t1≤t≤t1 t2,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0090]
一可选实施例中,当交叉铺网小车位于减加速段时,步骤105中,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0091]
计算
[0092][0093]
其中,t1 t2≤t≤t1 t2 t3,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0094]
一可选实施例中,当交叉铺网小车位于匀速段时,步骤105中,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0095]
计算
[0096][0097]
其中,t1 t2 t3≤t≤t1 t2 t3 t4,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0098]
一可选实施例中,当交叉铺网小车位于加减速段时,步骤105中,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0099]
计算
[0100][0101]
其中,t1 t2 t3 t4≤t≤t1 t2 t3 t4 t5,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0102]
一可选实施例中,当交叉铺网小车位于匀减速段时,步骤105中,计算交叉铺网小
车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0103]
计算
[0104][0105]
其中,t1 t2 t3 t4 t5≤t≤t1 t2 t3 t4 t5 t6,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0106]
一可选实施例中,当交叉铺网小车位于减减速段时,步骤105中,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0107]
计算
[0108][0109]
其中,t1 t2 t3 t4 t5 t6≤t≤t1 t2 t3 t4 t5 t6 t7,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0110]
本发明实施例中,交叉铺网小车在铺设任一层时,凸轮运动的加加速度在7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段的取值分别如下:
[0111]
11)加加速段的凸轮运动的加加速度:j(t)如下:
[0112]
j(t)=j
max
,0≤t≤t1;
[0113]
12)匀加速段的凸轮运动的加加速度:j(t)如下:
[0114]
j(t)=0,t1≤t≤t1 t2;
[0115]
13)减加速段的凸轮运动的加加速度:j(t)如下:
[0116]
j(t)=-j
max
,t1 t2≤t≤t1 t2 t3;
[0117]
14)匀速段的凸轮运动的加加速度:j(t)如下:
[0118]
j(t)=0,t1 t2 t3≤t≤t1 t2 t3 t4;
[0119]
15)加减速段的凸轮运动的加加速度:j(t)如下:
[0120]
j(t)=-j
max
,t1 t2 t3 t4≤t≤t1 t2 t3 t4 t5;
[0121]
16)匀减速段的凸轮运动的加加速度:j(t)如下:
[0122]
j(t)=0,t1 t2 t3 t4 t5≤t≤t1 t2 t3 t4 t5 t6;
[0123]
17)减减速段的凸轮运动的加加速度:j(t)如下:
[0124]
j(t)=j
max
,t1 t2 t3 t4 t5 t6≤t≤t1 t2 t3 t4 t5 t6 t7。
[0125]
根据上述11)-17)中的交叉铺网小车在铺设任一层时,凸轮运动的加加速度在7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段的取值,可以得知:交叉铺网小车在铺设任一层时,凸轮运动的加速度在7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段的变化情况,图2为本发明实施例中交叉铺网小车的凸轮运动的加速度曲线示意图,如图2所示,具体如下:
[0126]
21)加加速段的凸轮运动的加速度:a(t)如下:
[0127]
a(t)=j
max
t,0≤t≤t1;
[0128]
22)匀加速段的凸轮运动的加速度:a(t)如下:
[0129]
a(t)=a
max
=j
max
t1,t1≤t≤t1 t2;
[0130]
23)减加速段的凸轮运动的加速度:a(t)如下:
[0131]
a(t)=a
max-j
max
(t-t
1-t2),t1 t2≤t≤t1 t2 t3;
[0132]
24)匀速段的凸轮运动的加速度:a(t)如下:
[0133]
a(t)=0,t1 t2 t3≤t≤t1 t2 t3 t4;
[0134]
25)加减速段的凸轮运动的加速度:a(t)如下:
[0135]
a(t)=-j
max
(t-t
1-t
2-t
3-t4),t1 t2 t3 t4≤t≤t1 t2 t3 t4 t5;
[0136]
26)匀减速段的凸轮运动的加速度:a(t)如下:
[0137]
a(t)=-a
max
,t1 t2 t3 t4 t5≤t≤t1 t2 t3 t4 t5 t6;
[0138]
27)减减速段的凸轮运动的加速度:a(t)如下:
[0139]
a(t)=-a
max
j
max
(t-t
1-t
2-t
3-t
4-t
5-t6),t1 t2 t3 t4 t5 t6≤t≤t1 t2 t3 t4 t5 t6 t7。
[0140]
根据上述21)-27)中的交叉铺网小车在铺设任一层时,凸轮运动的加速度在7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段的变化情况,可以得知:交叉铺网小车在铺设任一层时,凸轮运动的速度在7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段的变化情况,图3为本发明实施例中交叉铺网小车的凸轮运动的速度曲线示意图,如图3所示,具体如下:
[0141]
31)加加速段的凸轮运动的速度:v(t)如下:
[0142]
v(t)=0.5j
max
t2,0≤t≤t1;
[0143]
32)匀加速段的凸轮运动的速度:v(t)如下:
[0144]
v(t)=0.5j
max
t
12
a
max
(t-t1),t1≤t≤t1 t2;
[0145]
33)减加速段的凸轮运动的速度:v(t)如下:
[0146]
v(t)=-0.5j
max
(t-t
1-t2)2 0.5j
max
t
12
a
max
t2,t1 t2≤t≤t1 t2 t3;
[0147]
34)匀速段的凸轮运动的速度:v(t)如下:
[0148]
v(t)=v
max
=-0.5j
max
t
32
0.5j
max
t
12
a
max
t2,t1 t2 t3≤t≤t1 t2 t3 t4;
[0149]
35)加减速段的凸轮运动的速度:v(t)如下:
[0150]
v(t)=-0.5j
max
(t-t
1-t
2-t
3-t4)2 v
max
,t1 t2 t3 t4≤t≤t1 t2 t3 t4 t5;
[0151]
36)匀减速段的凸轮运动的速度:v(t)如下:
[0152]
v(t)=v
max-0.5j
max
t
52-a
max
(t-t
1-t
2-t
3-t
4-t5),t1 t2 t3 t4 t5≤t≤t1 t2 t3 t4 t5 t6;
[0153]
37)减减速段的凸轮运动的速度:v(t)如下:
[0154]
v(t)=0.5j
max
(t-t
1-t
2-t
3-t
4-t
5-t6)
2-a
max
(t-t
1-t
2-t
3-t
4-t
5-t6) v
max-0.5j
max
t
52-a
max
t6,t1 t2 t3 t4 t5 t6≤t≤t1 t2 t3 t4 t5 t6 t7。
[0155]
从上述铺网小车的凸轮运动的加速度曲线和速度曲线可以看出:铺网小车的运动过程是加速到匀速再从匀速减速到0,加速/减速曲线的形状如字母s,加速/减速开始时速度比较缓慢,然后逐渐加快,在加速/减速接近结束时速度再次缓慢下来,从而使移动较为稳定,s形曲线加减速将加减速过程变为7段加减速过程,形成s字形,s形加减速的速度曲线更加平滑,从而能够减少对铺网小车的控制过程中的冲击,对于凸轮机的响应的要求降低,并使插补过程具有柔性。
[0156]
根据上述31)-37)中的交叉铺网小车在铺设任一层时,凸轮运动的速度在7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段的变化情况,可以得知:交叉铺网小车在铺设任一层时,交叉铺网小车的凸轮运动位移在7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段的变化情况,具体如下:
[0157]
41)加加速段的凸轮运动位移:s(t)如下:
[0158][0159]
42)匀加速段的凸轮运动位移:s(t)如下:
[0160][0161]
其中,t1≤t≤t1 t2。
[0162]
43)减加速段的凸轮运动位移:s(t)如下:
[0163][0164]
其中,t1 t2≤t≤t1 t2 t3;
[0165]
44)匀速段的凸轮运动位移:s(t)如下:
[0166][0167]
其中,t1 t2 t3≤t≤t1 t2 t3 t4;
[0168]
45)加减速段的凸轮运动位移:s(t)如下:
[0169][0170]
其中,t1 t2 t3 t4≤t≤t1 t2 t3 t4 t5;
[0171]
46)匀减速段的凸轮运动位移:s(t)如下:
[0172][0173]
其中,t1 t2 t3 t4 t5≤t≤t1 t2 t3 t4 t5 t6;
[0174]
47)减减速段的凸轮运动位移:s(t)如下:
[0175][0176]
其中,t1 t2 t3 t4 t5 t6≤t≤t1 t2 t3 t4 t5 t6 t7。
[0177]
图4为实际应用中,一铺网小车在某段时间内的凸轮运动的加速度曲线、速度曲线和位移曲线的示意图,其中,41为加速度曲线,曲线的横坐标为时间,纵坐标为加速度;42为速度曲线,曲线的横坐标为时间,纵坐标为速度;43为位移曲线,曲线的横坐标为时间,纵坐标为位移。
[0178]
图5为本发明实施例提供的交叉铺网小车控制装置50的结构示意图,该装置50主要包括:单层铺设时长计算模块51、子时间段划分模块52、加加速度最大值计算模块53和位
移计算模块54,其中:
[0179]
单层铺设时长计算模块51,用于根据进料速度和每层的铺设宽度以及铺设总层数,确定每层的铺设时长。
[0180]
子时间段划分模块52,用于将单层铺设时长计算模块51确定的每层的铺设时长依次划分为7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段;根据预设的加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例,确定这7个时间段中每个时间段的时长。
[0181]
加加速度最大值计算模块53,用于根据子时间段划分模块52确定的7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值。
[0182]
位移计算模块54,用于根据加加速度最大值计算模块53计算的交叉铺网小车的凸轮运动的加加速度的最大值,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移;将交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移发送给交叉铺网小车的伺服控制器,以使得交叉铺网小车的伺服控制器根据所述每一时刻的凸轮运动位移控制交叉铺网小车进行铺网。
[0183]
一可选实施例中,子时间段划分模块52划分的加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例为:2:1:2:4:2:1:2。
[0184]
一可选实施例中,加加速度最大值计算模块53根据这7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值,包括:
[0185]
根据a
max
=j
max
t1,v
max
=-0.5j
max
t
32
0.5j
max
t
12
a
max
t2,以及,
[0186][0186][0186]
计算j
max
;
[0187]
其中,d为每层的铺设宽度,j
max
为交叉铺网小车的凸轮运动的加加速度的最大值,a
max
为交叉铺网小车的凸轮运动的加速度的最大值,v
max
为交叉铺网小车的凸轮运动的速度的最大值,t1为每层铺设时长中加加速段的时长,t2为每层铺设时长中匀加速段的时长,t3为每层铺设时长中减加速段的时长,t4为每层铺设时长中匀速段的时长,t5为每层铺设时长中加减速段的时长,t6为每层铺设时长中匀减速段的时长,t7为每层铺设时长中减减速段的时长。
[0188]
一可选实施例中,当交叉铺网小车位于加加速段时,位移计算模块54计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0189]
计算
[0190][0191]
其中,0≤t≤t1,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0192]
一可选实施例中,当交叉铺网小车位于匀加速段时,位移计算模块54计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0193]
计算
[0194][0195]
其中,t1≤t≤t1 t2,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0196]
一可选实施例中,当交叉铺网小车位于减加速段时,位移计算模块54计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0197]
计算
[0198][0199]
其中,t1 t2≤t≤t1 t2 t3,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0200]
一可选实施例中,当交叉铺网小车位于匀速段时,位移计算模块54计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0201]
计算
[0202][0203]
其中,t1 t2 t3≤t≤t1 t2 t3 t4,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0204]
一可选实施例中,当交叉铺网小车位于加减速段时,位移计算模块54计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0205]
计算
[0206][0207]
其中,t1 t2 t3 t4≤t≤t1 t2 t3 t4 t5,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0208]
一可选实施例中,当交叉铺网小车位于匀减速段时,位移计算模块54计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0209]
计算
[0210][0211]
其中,t1 t2 t3 t4 t5≤t≤t1 t2 t3 t4 t5 t6,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0212]
一可选实施例中,当交叉铺网小车位于减减速段时,位移计算模块54计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:
[0213]
计算
[0214]
[0215]
其中,t1 t2 t3 t4 t5 t6≤t≤t1 t2 t3 t4 t5 t6 t7,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。
[0216]
本发明实施例还提供一种非瞬时计算机可读存储介质,该非瞬时计算机可读存储介质存储指令,该指令在由处理器执行时使得该处理器执行如上所述的交叉铺网小车控制方法的步骤。
[0217]
本发明实施例还提供一种计算机程序产品,包括计算机程序或指令,该计算机程序或指令被处理器执行时实现如上所述的交叉铺网小车控制方法的步骤。
[0218]
本发明实施例还提供一种电子设备,包括:处理器和存储器,其中:存储器存储有程序,该程序配置为在被该处理器执行时使得该处理器执行如上所述的交叉铺网小车控制方法的步骤。
[0219]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。