技术特征:
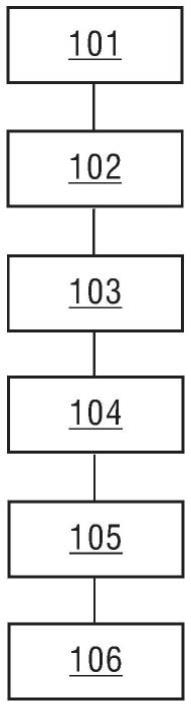
1.一种交叉铺网小车控制方法,其特征在于,该方法包括:根据进料速度和每层的铺设宽度以及铺设总层数,确定每层的铺设时长;将每层的铺设时长依次划分为7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段;根据预设的加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例,确定这7个时间段中每个时间段的时长;根据这7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值;根据交叉铺网小车的凸轮运动的加加速度的最大值,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移;将交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移发送给交叉铺网小车的伺服控制器,以使得交叉铺网小车的伺服控制器根据所述每一时刻的凸轮运动位移控制交叉铺网小车进行铺网。2.根据权利要求1所述的方法,其特征在于,所述加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例为:2:1:2:4:2:1:2。3.根据权利要求1所述的方法,其特征在于,所述根据这7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值,包括:根据a
max
=j
max
t1,v
max
=-0.5j
max
t
32
0.5j
max
t
12
a
max
t2,以及,,以及,计算j
max
;其中,d为每层的铺设宽度,j
max
为交叉铺网小车的凸轮运动的加加速度的最大值,a
max
为交叉铺网小车的凸轮运动的加速度的最大值,v
max
为交叉铺网小车的凸轮运动的速度的最大值,t1为每层铺设时长中加加速段的时长,t2为每层铺设时长中匀加速段的时长,t3为每层铺设时长中减加速段的时长,t4为每层铺设时长中匀速段的时长,t5为每层铺设时长中加减速段的时长,t6为每层铺设时长中匀减速段的时长,t7为每层铺设时长中减减速段的时长。4.根据权利要求3所述的方法,其特征在于,当交叉铺网小车位于加加速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:计算其中,0≤t≤t1,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。5.根据权利要求3所述的方法,其特征在于,当交叉铺网小车位于匀加速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:计算
其中,t1≤t≤t1 t2,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。6.根据权利要求3所述的方法,其特征在于,当交叉铺网小车位于减加速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:计算其中,t1 t2≤t≤t1 t2 t3,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。7.根据权利要求3所述的方法,其特征在于,当交叉铺网小车位于匀速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:计算其中,t1 t2 t3≤t≤t1 t2 t3 t4,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。8.根据权利要求3所述的方法,其特征在于,当交叉铺网小车位于加减速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:计算其中,t1 t2 t3 t4≤t≤t1 t2 t3 t4 t5,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。9.根据权利要求3所述的方法,其特征在于,当交叉铺网小车位于匀减速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:计算其中,t1 t2 t3 t4 t5≤t≤t1 t2 t3 t4 t5 t6,s(t)为交叉铺网小车在铺设当前层时在t时刻的凸轮运动位移。10.根据权利要求3所述的方法,其特征在于,当交叉铺网小车位于减减速段时,所述计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移,包括:计算其中,t1 t2 t3 t4 t5 t6≤t≤t1 t2 t3 t4 t5 t6 t7,s(t)为交叉铺网小车在铺设当前层
时在t时刻的凸轮运动位移。11.根据权利要求1所述的方法,其特征在于,所述加加速段、减加速段、加减速段和减减速段的加加速的绝对值相同。12.一种交叉铺网小车控制装置(50),其特征在于,该装置(50)包括:单层铺设时长计算模块(51),用于根据进料速度和每层的铺设宽度以及铺设总层数,确定每层的铺设时长;子时间段划分模块(52),用于将每层的铺设时长依次划分为7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段;根据预设的加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段之间的时长比例,确定这7个时间段中每个时间段的时长;加加速度最大值计算模块(53),用于根据所述7个时间段中每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值;位移计算模块(54),用于根据交叉铺网小车的凸轮运动的加加速度的最大值,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移;将交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移发送给交叉铺网小车的伺服控制器,以使得交叉铺网小车的伺服控制器根据所述每一时刻的凸轮运动位移控制交叉铺网小车进行铺网。13.一种非瞬时计算机可读存储介质,所述非瞬时计算机可读存储介质存储指令,其特征在于,所述指令在由处理器执行时使得所述处理器执行如权利要求1至11任一项所述的方法的步骤。14.一种计算机程序产品,包括计算机程序或指令,其特征在于,该计算机程序或指令被处理器执行时实现如权利要求1至11任一项所述的方法的步骤。15.一种电子设备,其特征在于,包括:处理器和存储器,其中:存储器存储有程序,所述程序配置为在被所述处理器执行时使得所述处理器执行如权利要求1至11任一项所述的方法的步骤。
技术总结
本发明实施例公开了交叉铺网小车控制方法、装置及可读存储介质。方法包括:根据进料速度和每层的铺设宽度以及铺设总层数,确定每层的铺设时长;将每层的铺设时长依次划分为7个时间段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段;根据7个时间段之间的时长比例,确定每个时间段的时长;根据每个时间段的时长以及每层的铺设宽度,计算交叉铺网小车的凸轮运动的加加速度的最大值;根据交叉铺网小车的凸轮运动的加加速度的最大值,计算交叉铺网小车在铺设每层时在每一时刻的凸轮运动位移;将交叉铺网小车在每一时刻的凸轮运动位移发送给交叉铺网小车的伺服控制器。本发明实施例提高了交叉铺网小车的铺网速度。度。度。
技术研发人员:陈慧敏
受保护的技术使用者:西门子(中国)有限公司
技术研发日:2022.09.02
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。