技术特征:
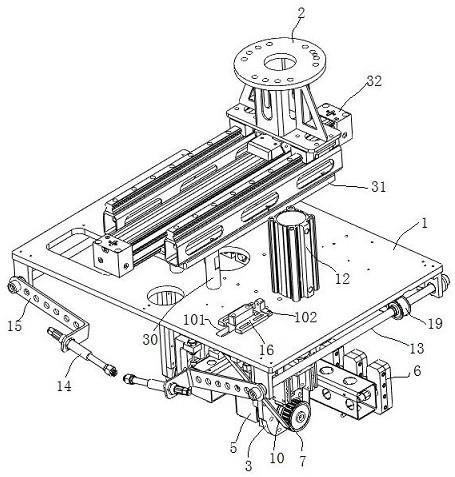
1.一种电池注塑壳体拆码垛机器人手爪夹具,其特征在于:所述夹具包括固定板(1),固定板(1)顶部设置有连接法兰(2),固定板(1)底部设置有壳体抓取装置和垫板抓取装置,所述壳体抓取装置包括相对设置在固定板(1)底部的连接架(3),连接架(3)底部转动设置有连接轴(4),连接轴(4)端部与吸盘固定架(5)连接,吸盘固定架(5)上设置有壳体吸盘(6);其中一根连接轴(4)一端与第一传动组连接,第一传动组带动连接轴(4)转动,使得吸盘固定架(5)实现180
°
翻转;所述垫板抓取装置包括固定轴(13),固定轴(13)与固定板(1)底部转动连接,固定轴(13)两端通过连接板(15)与垫板吸盘(14)连接,固定轴(13)通过第二传动组带动垫板吸盘(14)吸附垫板。2.根据权利要求1所述的一种电池注塑壳体拆码垛机器人手爪夹具,其特征在于:所述第一传动组包括第一带轮(7)、第一张紧轮(8)、第二带轮(9)、开口同步带(10)、第一气缸(12),第一带轮(7)与连接轴(4)的一端固定连接,固定板(1)下方设置有第一张紧轮(8)、第二带轮(9),开口同步带(10)啮合在第一带轮(7)、第一张紧轮(8)、第二带轮(9)上且端部固定在滑动板(11)上,滑动板(11)与连接架(3)侧壁的导轨滑动连接,滑动板(11)顶部与第一气缸(12)输出轴连接,第一气缸(12)固定在固定板(1)上,第一气缸(12)带动滑动板(11)上下运动,开口同步带(10)带动第一带轮(7)转动,使得吸盘固定架(5)实现180
°
翻转。3.根据权利要求2所述的一种电池注塑壳体拆码垛机器人手爪夹具,其特征在于:所述固定板(1)上开设有调节槽(101),张紧轮定位板(16)底部穿过调节槽(101)后连接有第一张紧轮(8),张紧轮定位板(16)侧壁上部向外延伸有限位部,限位部上设置有长腰型孔,固定板(1)上靠近张紧轮定位板(16)一端设置有限位板(102),第一张紧轮(8)和第二带轮(9)位于统一水平高度,第一带轮(7)位于第二带轮(9)下方。4.根据权利要求1所述的一种电池注塑壳体拆码垛机器人手爪夹具,其特征在于:所述第二传动组包括第二气缸(17)、第一同步带(18)、第三带轮(19)、第四带轮(20)、齿轮传动组(21)、第五带轮(22)、第六带轮(23)、第二同步带(24),所述第二气缸(17)固定在固定板(1)下方,第二气缸(17)输出端与第一同步带(18)固定连接,第三带轮(19)设置在其中一根固定轴(13)上,第四带轮(20)转动设置在固定板(1)下方,第一同步带(18)啮合在第三带轮(19)和第四带轮(20)上,第四带轮(20)与齿轮传动组中的一个齿轮同轴固定,第五带轮(22)设置在另一根固定轴(13)上,第六带轮(23)转动设置在固定板(1)下方,第二同步带(24)啮合在第五带轮(22)和第六带轮(23)上,第六带轮(23)与齿轮传动组中的另一个齿轮同轴固定;第二气缸(17)带动第一同步带(18)运动,第一同步带(18)带动第三带轮(19)转动,其中一根固定轴(13)两端的垫板吸盘(14)转动,同步地,第四带轮(20)带动齿轮传动组驱动第六带轮(23)同步转动,第二同步带(24)带动第五带轮(22)转动,另一根固定轴(13)两端的垫板吸盘(14)也转动,四个垫板吸盘(14)吸附垫板。5.根据权利要求4所述的一种电池注塑壳体拆码垛机器人手爪夹具,其特征在于:所述第一同步带(18)下方设置有第二张紧轮(25),第二张紧轮(25)转动设置在固定杆(26)上,固定杆(26)穿设在调节板(27)上,调节板(27)上设置有调节丝杆(28),调节丝杆(28)穿过固定杆(26)并与之啮合,调节板(27)顶部固定在固定板(1)底部。6.根据权利要求5所述的一种电池注塑壳体拆码垛机器人手爪夹具,其特征在于:所述调节丝杆(28)端部延伸出调节板(27)且端部上设置有调节孔(29)。7.根据权利要求1所述的一种电池注塑壳体拆码垛机器人手爪夹具,其特征在于:所述
固定板(1)顶部设置有支撑柱(30),支撑柱(30)顶部设置有气缸定位板(31),气缸定位板(31)上设置有无杆气缸(32),无杆气缸(32)与连接法兰(2)固定连接。8.根据权利要求7所述的一种电池注塑壳体拆码垛机器人手爪夹具,其特征在于:所述连接法兰(2)底部两侧设置有滑块,气缸定位板(31)设置有导轨,导轨与滑块间滑动连接。
技术总结
本发明公开了一种电池注塑壳体拆码垛机器人手爪夹具,涉及智能拆码垛设备技术领域。机器人手爪夹具的固定板顶部设置有连接法兰,壳体抓取装置包括相对设置在固定板底部的连接架,连接架底部转动设置有连接轴,连接轴端部与吸盘固定架连接,吸盘固定架上设置有壳体吸盘;连接轴一端与第一传动组连接,使得吸盘固定架实现180
技术研发人员:杨灏泉 杨政荣 李亚平 杨云 徐勤坤
受保护的技术使用者:云南柔控科技有限公司
技术研发日:2022.11.30
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。