1.本实用新型涉及机械抛光技术领域,尤其涉及一种一对四自动化上下料抛光机。
背景技术:
2.机械抛光是依靠非常细小的抛光粉的磨削、滚压作用,除去试样磨面上的极薄一层金属,抛光常常用于增强产品的外观,防止仪器的污染,除去氧化,创建一个反射表面,或防止腐蚀的管道,在冶金中,抛光用于形成平坦,无缺陷的表面,用于在显微镜下检查金属的微观结构,抛光过程中可以使用硅基抛光垫或金刚石溶液,抛光不锈钢也可以增加不锈钢的清洁卫生程度,现有的装置在抛光作业中还是需要一定的问题,故我们设计一种一对四自动化上下料抛光机。
3.传统的全自动上下料抛光设备在使用时还存在以下问题:
4.传统的全自动上下料抛光设备,在使用的过程中,对于物品双面打磨的时候,需要人工进行翻面的效果,第一影响机器的工作效率,增加工作人员的工作量,第二会降低打磨的精准度,从而降低装置的实用性。
技术实现要素:
5.本实用新型的目的在于提供一对四自动化上下料抛光机,解决了传统的全自动上下料抛光设备,在使用的过程中,对于物品双面打磨的时候,需要人工进行翻面的效果,第一影响机器的工作效率,增加工作人员的工作量,第二会降低打磨的精准度,从而降低装置实用性的问题。
6.为解决上述技术问题,本实用新型提供如下技术方案:一种一对四自动化上下料抛光机,包括cv作业线,plc控制器,所述cv作业线的一侧固定安装有第七轴,所述第七轴远离cv作业线一侧的顶端固定连接有翻转架,所述第七轴的顶端可拆卸安装有六轴机器人,所述六轴机器人一侧的顶端可拆卸安装有上料架,所述第七轴的一侧放置有基座,所述基座一侧的顶端放置有抛光机,所述cv作业线的顶端放置有玻璃板。
7.优选的,所述基座的数量为四个,四个所述基座俩俩对称分布在所述第七轴的两侧。
8.优选的,所述六轴机器人和所述第七轴的连接关系为滑动连接。
9.优选的,所述六轴机器人包括电机座,所述电机座输出端固定安装有底座,所述底座上固定安装有气缸,所述底座外侧固定安装有第一电机,所述第一电机输出端固定设有第一机械臂,所述第一机械臂另一端活动安装有第二机械臂,所述第一机械臂和第二机械臂之间设有第二电机,所述第二机械臂另一端固定安装有第三电机,所述第三电机输出端固定安装有转动接头,所述转动接头输出端转动安装有安装接头。
10.优选的,所述上料架和所述安装接头的连接关系为可拆卸安装。
11.优选的,所述上料架包括安装架,所述安装架的表面固定安装有吸盘。
12.与相关技术相比较,本实用新型提供的一对四自动化上下料抛光机有如下有益效
果:
13.1、本实用新型提供一对四自动化上下料抛光机,通过第七轴,六轴机器人,上料架,抛光机和基座相配合,起到了利用六轴机器人同一时间的视线对于四个抛光机进行打磨作业,大大提高产品的打磨效率,从而提高装置的工作效率,提高装置的实用性。
14.2、本实用新型提供一对四自动化上下料抛光机,采用cv作业线,第七轴,翻转架,六轴机器人和上料架相配合,起到了利用六轴机器人带动上料架将需要打磨的产品放置在翻转架上,再对于上料架的翻转,通过上料架取下翻转架上的物品,实现物品的翻面,利用机器代替人工进行翻面作业,提高装置的工作效率,同时提高装置打磨的精准度,提高装置的实用性。
附图说明
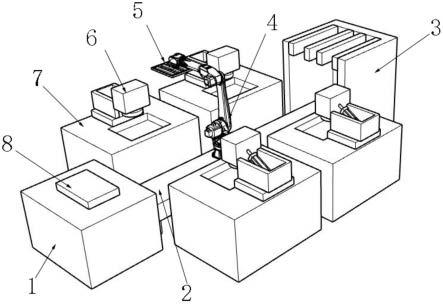
15.图1为本实用新型的立体结构示意图;
16.图2为本实用新型的装置翻面流程结构示意图;
17.图3为本实用新型的六轴机器人结构示意图;
18.图4为本实用新型的上料架表面结构示意图。
19.图中标号:1、cv作业线;2、第七轴;3、翻转架;4、六轴机器人;5、上料架;6、抛光机;7、基座;8、玻璃板;41、电机座;42、底座;43、气缸;44、第一电机;45、第一机械臂;46、第二电机;47、第二机械臂;48、转动接头;49、安装接头;51、安装架;52、吸盘。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.实施例一:
22.请参阅图1-4,本实用新型提供一种技术方案:一种一对四自动化上下料抛光机,包括cv作业线1,plc控制器,cv作业线1的一侧固定安装有第七轴2,第七轴2远离cv作业线1一侧的顶端固定连接有翻转架3,第七轴2的顶端可拆卸安装有六轴机器人4,六轴机器人4一侧的顶端可拆卸安装有上料架5,第七轴2的一侧放置有基座7,基座7一侧的顶端放置有抛光机6,cv作业线1的顶端放置有玻璃板8,基座7的数量为四个,四个基座7俩俩对称分布在第七轴2的两侧,六轴机器人4和第七轴2的连接关系为滑动连接,六轴机器人4包括电机座41,电机座41输出端固定安装有底座42,底座42上固定安装有气缸43,底座42外侧固定安装有第一电机44,第一电机44输出端固定设有第一机械臂45,第一机械臂45另一端活动安装有第二机械臂47,第一机械臂45和第二机械臂47之间设有第二电机46,第二机械臂47另一端固定安装有第三电机,第三电机输出端固定安装有转动接头48,转动接头48输出端转动安装有安装接头49,上料架5和安装接头49的连接关系为可拆卸安装,上料架5包括安装架51,安装架51的表面固定安装有吸盘52。
23.在实施方案中,通过第七轴2,六轴机器人4,上料架5,抛光机6和基座7相配合,起到了利用六轴机器人4同一时间的视线对于四个抛光机6进行打磨作业,大大提高产品的打
磨效率,从而提高装置的工作效率,提高装置的实用性;采用cv作业线1,第七轴2,翻转架3,六轴机器人4和上料架5相配合,起到了利用六轴机器人4带动上料架5将需要打磨的产品放置在翻转架3上,再对于上料架5的翻转,通过上料架5取下翻转架3上的物品,实现物品的翻面,利用机器代替人工进行翻面作业,提高装置的工作效率,同时提高装置打磨的精准度,提高装置的实用性。
24.工作原理:
25.通过plc控制器启动六轴机器人4和第七轴2的电路,六轴机器人4通过第七轴2移动到cv作业线1的下方,过程中,电机座41带动底座42转动,使得六轴机器人4在水平方向上360度自由调节,第一电机44和第二电机46带动第一机械臂45和第二机械臂47转动调节,通过第三电机带动转动接头48转动,使得安装接头49可纵向360度转动调节,使得安装架51位于玻璃板8的上方,通过气缸43使得吸盘52呈负压状态,进而可将玻璃板8固定在安装架51上,将玻璃板8移动至基座7上,通过抛光机6可对玻璃板8进行打磨抛光,通过上述方法,由于设有四个抛光机6,可依次将玻璃板8放置在基座7上,当最后一块玻璃板8放置完成后,第一块玻璃板8tft面打磨完成,通过吸盘52将第一块玻璃板8取出,并通过第七轴2移动到翻转架3一侧,将玻璃板8放置在翻转架3上,转动安装接头49,使得吸盘52开口向上,将安装架51移动到翻转架3下方,可通过吸盘52将玻璃板8cf面吸附,进而翻转安装接头49,可实现玻璃板8的翻转,将翻转后的玻璃板8放置在基台上,通过抛光机6可对玻璃板8cf面进行打磨,同理依次对多块玻璃进行翻转打磨,打磨完成后,通过六轴机器人4将玻璃板8移动至cv作业线1的上方,并通过cv作业线1传动到下一工作环节,通过全自动化的上料以及下料,节约了人力成本,降低了劳动强度,提高了生产效率。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。