1.本发明涉及激光焊接领域,具体是一种射频仪器生产用激光焊接装置。
背景技术:
2.激光焊接是利用高能量密度的激光束作为热源的一种高效精密焊接方法。激光焊接是激光材料加工技术应用的重要方面之一。
3.现有技术中,通常是通过激光焊机实现对工件的固定位置进行焊接,但是现有技术不能够实现激光焊接按照工件的指定焊接路径进行往复变位焊接,所以现有技术有较大的改进空间。
技术实现要素:
4.本发明提供一种射频仪器生产用激光焊接装置,解决了上述背景技术中所提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种射频仪器生产用激光焊接装置,包括安装座,所述安装座固定连接竖板,竖板上设有驱动辊机构和调节杆机构,安装座固定连接滑板固定座,滑板固定座上设有滑槽,滑板固定座滑动连接滑板,滑板位于滑槽内,滑板上设有变位杆机构和棘轮机构,驱动辊机构用于驱动变位杆机构移动,调节杆机构用于实现变位杆机构变位,棘轮机构固定连接移动机构和升降机构,移动机构用于驱动棘轮机构转动,棘轮机构用于驱动升降机构,升降机构固定连接激光焊接头,安装座固定连接定位板,定位板上设有夹持机构。
7.作为本发明的一种优选技术方案,所述驱动辊机构包括固定于竖板上的电机支架,电机支架固定连接电机,电机的输出轴固定连接驱动轴,驱动轴和竖板转动连接,驱动轴固定连接驱动辊。
8.作为本发明的一种优选技术方案,所述调节杆机构包括固定于竖板上的移动杆,移动杆滑动连接两个滑块,滑块螺纹连接第一螺栓,滑块固定连接调节杆。
9.作为本发明的一种优选技术方案,所述变位杆机构包括和滑板转动连接的转动轴,转动轴固定连接第一连杆和第二连杆,第二连杆固定连接第一竖杆,第一连杆固定连接驱动轮座,驱动轮座转动连接驱动轮,驱动轮和驱动辊接触,滑板转动连接旋转套筒,旋转套筒和转动轴转动连接,旋转套筒固定连接第三连杆,第三连杆固定连接第二竖杆,第一竖杆转动连接第一套环,第二竖杆转动连接第二套环,第一套环和第二套环之间固定连接第一弹簧,滑板上固定连接四根限位杆。
10.作为本发明的一种优选技术方案,所述棘轮机构包括和滑板转动连接转动套筒,转动套筒内固定连接若干个棘齿,转动套筒转动连接棘爪固定轴,棘爪固定轴固定连接若干个棘爪转动座,棘爪转动座转动连接棘爪,棘爪和棘爪固定轴之间第二弹簧。
11.作为本发明的一种优选技术方案,所述移动机构包括固定于滑板固定座上的齿条,齿条啮合齿轮,齿轮和转动套筒固定连接。
12.作为本发明的一种优选技术方案,所述升降机构包括固定于滑板上的连接杆,连接杆远离滑板的一端固定连接顶板,顶板转动连接第一螺纹杆,第一螺纹杆和棘爪固定轴固定连接,连接杆滑动连接升降块,升降块螺纹连接第二螺纹杆,第二螺纹杆固定连接转动把手,第二螺纹杆远离转动把手的一端转动连接移动套,升降块上设有移动槽,移动套位于移动槽内,移动套和升降块滑动连接,移动套内壁一侧设有螺纹槽。
13.作为本发明的一种优选技术方案,所述定位板上设有若干个安装孔,夹持机构包括第二螺栓,第二螺栓穿过安装孔,第二螺栓螺纹连接底板,底板固定连接固定侧板,固定侧板螺纹连接第三螺纹杆,第三螺纹杆固定连接夹持把手,第三螺纹杆远离夹持把手的一端转动连接夹持板,夹持板和底板滑动连接。
14.本发明具有以下有益之处:本发明通过设置驱动辊机构能够驱动变位杆机构,进而带动激光焊接头移动焊接,配合调节杆机构能够实现变位杆机构变位,通过移动机构能够实现运动轨迹的变换,配合棘轮机构能够实现升降机构的单向驱动,通过棘轮机构能够带动升降机构升降,进而带动激光焊接头升降焊接,通过定位板和夹持机构能够实现工件在不同位置进行夹持对齐,提高了射频仪器生产焊接的效率。
附图说明
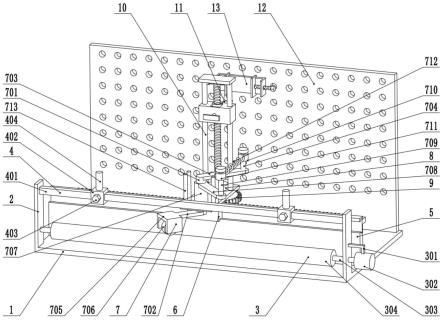
15.图1为一种射频仪器生产用激光焊接装置的结构示意图。
16.图2为射频仪器生产用激光焊接装置第二视角的结构示意图。
17.图3为射频仪器生产用激光焊接装置的俯视图。
18.图4为射频仪器生产用激光焊接装置中棘轮机构的剖视图。
19.图中:1、安装座;2、竖板;3、驱动辊机构;301、电机支架;302、电机;303、驱动轴;304、驱动辊;4、调节杆机构;401、移动杆;402、滑块;403、第一螺栓;404、调节杆;5、滑板固定座;6、滑板;7、变位杆机构;701、转动轴;702、第一连杆;703、第二连杆;704、第一竖杆;705、驱动轮座;706、驱动轮;707、旋转套筒;708、第三连杆;709、第二竖杆;710、第一套环;711、第二套环;712、第一弹簧;713、限位杆;8、棘轮机构;801、转动套筒;802、棘齿;803、棘爪固定轴;804、棘爪转动座;805、棘爪;806、第二弹簧;9、移动机构;901、齿条;902、齿轮;10、升降机构;1001、连接杆;1002、顶板;1003、第一螺纹杆;1004、升降块;1005、第二螺纹杆;1006、转动把手;1007、移动套;1008、移动槽;11、激光焊接头;12、定位板;13、夹持机构;1301、第二螺栓;1302、底板;1303、固定侧板;1304、第三螺纹杆;1305、夹持把手;1306、夹持板。
具体实施方式
20.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
21.实施例1
22.请参阅图1-图4,一种射频仪器生产用激光焊接装置,包括安装座1,所述安装座1固定连接竖板2,竖板2上设有驱动辊机构3和调节杆机构4,安装座1固定连接滑板固定座5,滑板固定座5上设有滑槽,滑板固定座5滑动连接滑板6,滑板6位于滑槽内,滑板6上设有变位杆机构7和棘轮机构8,驱动辊机构3用于驱动变位杆机构7移动,调节杆机构4用于实现变
位杆机构7变位,棘轮机构8固定连接移动机构9和升降机构10,移动机构9用于驱动棘轮机构8转动,棘轮机构8用于驱动升降机构10,升降机构10固定连接激光焊接头11,安装座1固定连接定位板12,定位板12上设有夹持机构13。
23.所述驱动辊机构3包括固定于竖板2上的电机支架301,电机支架301固定连接电机302,电机302的输出轴固定连接驱动轴303,驱动轴303和竖板2转动连接,驱动轴303固定连接驱动辊304。所述调节杆机构4包括固定于竖板2上的移动杆401,移动杆401滑动连接两个滑块402,滑块402螺纹连接第一螺栓403,滑块402固定连接调节杆404。所述变位杆机构7包括和滑板6转动连接的转动轴701,转动轴701固定连接第一连杆702和第二连杆703,第二连杆703固定连接第一竖杆704,第一连杆702固定连接驱动轮座705,驱动轮座705转动连接驱动轮706,驱动轮706和驱动辊304接触,滑板6转动连接旋转套筒707,旋转套筒707和转动轴701转动连接,旋转套筒707固定连接第三连杆708,第三连杆708固定连接第二竖杆709,第一竖杆704转动连接第一套环710,第二竖杆709转动连接第二套环711,第一套环710和第二套环711之间固定连接第一弹簧712,滑板6上固定连接四根限位杆713。
24.具体的,开启电机302,电机302的输出轴转动会带动驱动轴303转动,驱动轴303转动则会带动驱动辊304转动,从而带动驱动轮706转动,此时带动驱动轮座705移动,在驱动轮座705带动下,实现第一连杆702移动,从而带动滑板6沿滑板固定座5移动,而当第三连杆708抵在调节杆404上后,此时能够使得转动轴701和旋转套筒707相对转动,从而转动到另一边,在限位杆713的阻挡下,能够对第二连杆703和第三连杆708进行限位,使得驱动轮706变位,实现往反方向移动。
25.另外的,驱动轮706为橡胶材质,能够保证驱动轮706贴合在驱动辊304上。
26.所述棘轮机构8包括和滑板6转动连接转动套筒801,转动套筒801内固定连接若干个棘齿802,转动套筒801转动连接棘爪固定轴803,棘爪固定轴803固定连接若干个棘爪转动座804,棘爪转动座804转动连接棘爪805,棘爪805和棘爪固定轴803之间第二弹簧806。所述移动机构9包括固定于滑板固定座5上的齿条901,齿条901啮合齿轮902,齿轮902和转动套筒801固定连接。所述升降机构10包括固定于滑板6上的连接杆1001,连接杆1001远离滑板6的一端固定连接顶板1002,顶板1002转动连接第一螺纹杆1003,第一螺纹杆1003和棘爪固定轴803固定连接,连接杆1001滑动连接升降块1004,升降块1004螺纹连接第二螺纹杆1005,第二螺纹杆1005固定连接转动把手1006,第二螺纹杆1005远离转动把手1006的一端转动连接移动套1007,升降块1004上设有移动槽1008,移动套1007位于移动槽1008内,移动套1007和升降块1004滑动连接,移动套1007内壁一侧设有螺纹槽。
27.具体的,随着滑板6移动,从而带动齿轮902移动,由于齿轮902和齿条901啮合,使得齿轮902转动,带动转动套筒801转动,转动套筒801转动会带动棘齿802转动,棘齿802会带动棘爪805转动,棘爪805从而带动棘爪固定轴803单向转动,实现第一螺纹杆1003转动,而旋转转动把手1006能够带动第二螺纹杆1005转动,使得移动套1007沿移动槽1008移动,当移动套1007内螺纹槽一侧与第一螺纹杆1003接触时,能够使得移动套1007升降,从而带动升降块1004,而移动套1007内螺纹槽一侧不与第一螺纹杆1003接触时,能够使得升降块1004固定。
28.实施例2
29.请参阅图1-图4,本实施例的其它内容与实施例1相同,不同之处在于:所述定位板
12上设有若干个安装孔,夹持机构13包括第二螺栓1301,第二螺栓1301穿过安装孔,第二螺栓1301螺纹连接底板1302,底板1302固定连接固定侧板1303,固定侧板1303螺纹连接第三螺纹杆1304,第三螺纹杆1304固定连接夹持把手1305,第三螺纹杆1304远离夹持把手1305的一端转动连接夹持板1306,夹持板1306和底板1302滑动连接。
30.具体的,使得第三螺纹杆1304穿过安装孔,从而对底板1302安装在定位板12上,然后将工件放置在夹持板1306之间,此时转动夹持把手1305,夹持把手1305转动会带动第三螺纹杆1304转动,使得夹持板1306沿底板1302移动,用以实现对工件的夹持固定。
31.本发明在实施过程中,首先通过在定位板12上放置夹持机构13,通过夹持机构13实现对工件进行夹持对齐,然后对调节杆机构4的位置进行调节,此时开启驱动辊机构3,驱动辊机构3能够驱动变位杆机构7,进而带动滑板6沿滑板固定座5移动,在调节杆机构4阻挡下,能够使得变位杆机构7变位,实现往复移动,从而带动激光焊接头11往复移动,实现对工件的往复焊接,同时在移动机构9的带动下,能够使得棘轮机构8进行工作,从而对升降机构10进行驱动,使得激光焊接头11高度改变,用以实现对工件进行变位焊接。
32.本发明通过设置驱动辊机构3能够驱动变位杆机构7,进而带动激光焊接头11移动焊接,配合调节杆机构4能够实现变位杆机构7变位,通过移动机构9能够实现运动轨迹的变换,配合棘轮机构8能够实现升降机构10的单向驱动,通过棘轮机构8能够带动升降机构10升降,进而带动激光焊接头11升降焊接,通过定位板12和夹持机构13能够实现工件在不同位置进行夹持对齐,提高了射频仪器生产焊接的效率。
33.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。