1.本发明属于轧机设备技术领域,具体涉及一种串辊控制系统、配置有该串辊控制系统的多辊轧机以及基于该串辊控制系统实施的串辊控制方法。
背景技术:
2.目前,金属板带生产向高强度、低厚度、高精度、高速度、高产量方向发展。二十辊轧机以其工作辊辊径小、轧机刚度大、体积小、重量轻等特点在近年来不断发展和完善,在高精度、极薄带钢领域得到了广泛应用。为了获得良好的带钢板型、提高轧制成材率,除了采用合理的轧制工艺外,二十辊轧机还具备一定的板形调整手段;其中,中间辊的串辊(即驱动中间辊沿垂直于带钢运行方向相对移动)能连续调节轧辊凸度,从而调节辊缝形状,使其与所轧带钢的断面形状保持一致,还能均匀工作辊或中间辊的磨损。常规二十辊轧机中间辊的串辊驱动方式分为推拉式和推推式两种,推拉式只需要操作侧或传动侧中的某一侧固定驱动装置即可,推推式则需要操作侧和传动侧分别安装一套驱动装置;目前,推推式串辊方式应用较多。
3.为了实现二十辊轧机的上中间辊和下中间辊沿垂直于带钢运行方向相向串动,并且在带钢宽度方向上实现精确位移,常规控制方式是每个串辊驱动液压缸均配置一个线性位移传感器,且在液压回路上设置精密伺服阀。以一中间辊200为例,每组推推串辊有2个串辊驱动液压缸100,上、下两组推推串辊则有4个串辊驱动液压缸100,这样就需要4个精密伺服阀300,精密伺服阀300成本高,一旦生产现场的精密伺服阀300损坏,只能整体更换,耗资大、耗时长,已经成为亟待解决的问题。
技术实现要素:
4.本发明涉及一种串辊控制系统、配置有该串辊控制系统的多辊轧机以及基于该串辊控制系统实施的串辊控制方法,至少可解决现有技术的部分缺陷。
5.本发明涉及一种串辊控制系统,包括操作侧串辊液压缸和传动侧串辊液压缸,还包括第一阀控单元;
6.所述操作侧串辊液压缸的有杆腔与所述传动侧串辊液压缸的有杆腔通过中继油管串联,所述操作侧串辊液压缸的无杆腔以及所述传动侧串辊液压缸的无杆腔均与所述第一阀控单元连接,所述第一阀控单元用于控制操作侧串辊液压缸的无杆腔与进油管路连通、传动侧串辊液压缸的无杆腔与回油管路连通,或者控制操作侧串辊液压缸的无杆腔与回油管路连通、传动侧串辊液压缸的无杆腔与进油管路连通;
7.或者,所述操作侧串辊液压缸的无杆腔与所述传动侧串辊液压缸的无杆腔通过中继油管串联,所述操作侧串辊液压缸的有杆腔以及所述传动侧串辊液压缸的有杆腔均与所述第一阀控单元连接,所述第一阀控单元用于控制操作侧串辊液压缸的有杆腔与进油管路连通、传动侧串辊液压缸的有杆腔与回油管路连通,或者控制操作侧串辊液压缸的有杆腔与回油管路连通、传动侧串辊液压缸的有杆腔与进油管路连通。
8.作为实施方式之一,两组液压缸均配置有回流油管,所述回流油管连接对应液压缸的有杆腔和无杆腔,所述回流油管配置有第二阀控单元;所述中继油管串联两个有杆腔时,所述第二阀控单元控制的回流方向为无杆腔回流至有杆腔;所述中继油管串联两个无杆腔时,所述第二阀控单元控制的回流方向为有杆腔回流至无杆腔。
9.作为实施方式之一,两个回流油管各自独立,于两个回流油管上分别设有所述第二阀控单元。
10.作为实施方式之一,所述第二阀控单元采用二位二通电磁阀。
11.作为实施方式之一,两个回流油管共用一组第二阀控单元。
12.作为实施方式之一,所述第二阀控单元包括二位三通电磁阀,所述二位三通电磁阀具有一个进口和两个出口,两个回流油管均包括第一管段和第二管段并且回流油管的入口端位于第一管段上,两个第一管段均与所述二位三通电磁阀的进口连接,两个第二管段分别与所述二位三通电磁阀的两个出口连接。
13.作为实施方式之一,所述第二阀控单元包括三位四通电磁阀,其中一个回流油管与所述三位四通电磁阀的其中一个进口和其中一个出口连接,另一个回流油管与所述三位四通电磁阀的另一个进口和另一个出口连接。
14.作为实施方式之一,所述操作侧串辊液压缸和所述传动侧串辊液压缸均配置有用于检测其活塞杆位移量的位移检测单元。
15.本发明还提供一种多辊轧机,配置有至少一组如上所述的串辊控制系统。
16.本发明还提供一种串辊控制方法,基于上述的串辊控制系统实施,其中,
17.通过所述第一阀控单元控制对应侧的串辊液压缸进油,两组串辊液压缸在液压油的作用下进行相应的动作,使对应辊体向目标侧窜动。
18.本发明至少具有如下有益效果:
19.本发明将操作侧串辊液压缸与传动侧串辊液压缸的有杆腔或无杆腔串联,可以使操作侧串辊液压缸与传动侧串辊液压缸联锁运动,实现伺服动作,提高了串辊控制的可靠性。与传统方案相比,本方案能减少精密伺服阀的数量,从而节省设备投资和维护成本,操作人员的劳动强度也得以降低。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
21.图1为现有的串辊控制系统的结构示意图;
22.图2-图4为本发明实施例提供的三种串辊控制系统的结构示意图。
具体实施方式
23.下面对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范
围。
24.实施例一
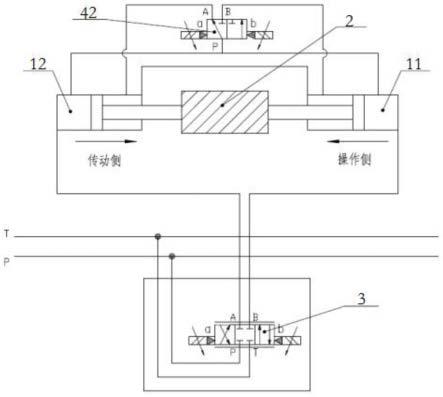
25.本发明实施例提供一种串辊控制系统,包括操作侧串辊液压缸11、传动侧串辊液压缸12和第一阀控单元3。
26.(1)在其中一个实施例中,如图2-图4,所述操作侧串辊液压缸11的有杆腔与所述传动侧串辊液压缸12的有杆腔通过中继油管串联,所述操作侧串辊液压缸11的无杆腔以及所述传动侧串辊液压缸12的无杆腔均与所述第一阀控单元3连接,所述第一阀控单元3用于控制操作侧串辊液压缸11的无杆腔与进油管路连通、传动侧串辊液压缸12的无杆腔与回油管路连通,或者控制操作侧串辊液压缸11的无杆腔与回油管路连通、传动侧串辊液压缸12的无杆腔与进油管路连通。
27.(2)在另外的实施例中,所述操作侧串辊液压缸11的无杆腔与所述传动侧串辊液压缸12的无杆腔通过中继油管串联,所述操作侧串辊液压缸11的有杆腔以及所述传动侧串辊液压缸12的有杆腔均与所述第一阀控单元3连接,所述第一阀控单元3用于控制操作侧串辊液压缸11的有杆腔与进油管路连通、传动侧串辊液压缸12的有杆腔与回油管路连通,或者控制操作侧串辊液压缸11的有杆腔与回油管路连通、传动侧串辊液压缸12的有杆腔与进油管路连通。
28.优选为采用上述第一种方式,相应地形成为推推串辊方式。
29.在其中一个实施例中,如图2-图4,上述第一阀控单元3包括三位四通阀,进油管路和回油管路与该三位四通阀的其中两个油口连接,两个串辊液压缸与该三位四通阀的另外两个油口连接。该三位四通阀优选为是电磁阀。
30.其中,优选地,上述第一阀控单元3采用伺服阀,采用伺服阀尤其是精密伺服阀能有效地提高串辊操作的准确性和可靠性。
31.本实施例提供的串辊控制系统,将操作侧串辊液压缸11与传动侧串辊液压缸12的有杆腔或无杆腔串联,可以使操作侧串辊液压缸11与传动侧串辊液压缸12联锁运动,实现伺服动作,提高了串辊控制的可靠性。与传统方案相比,本方案能减少精密伺服阀的数量,从而节省设备投资和维护成本,操作人员的劳动强度也得以降低。
32.进一步优选地,如图2-图4,两组液压缸均配置有回流油管,所述回流油管连接对应液压缸的有杆腔和无杆腔,所述回流油管配置有第二阀控单元;所述中继油管串联两个有杆腔时,所述第二阀控单元控制的回流方向为无杆腔回流至有杆腔;所述中继油管串联两个无杆腔时,所述第二阀控单元控制的回流方向为有杆腔回流至无杆腔。基于上述方案,可以有效地提高串辊控制精度和可靠性,具体地说:
33.因制造水平的限制,操作侧串辊液压缸11和传动侧串辊液压缸12的缸径极难保证完全一致,即使操作侧串辊液压缸11和传动侧串辊液压缸12选型相同,两组液压缸的缸径也存在误差;而基于上述方案,通过相应侧液压缸的液压油回流控制,可以实现对两组液压缸的同级腔体制造误差进行补偿,从而提高串辊控制精度和可靠性。
34.在其中一个实施例中,所述操作侧串辊液压缸11和所述传动侧串辊液压缸12均配置有用于检测其活塞杆位移量的位移检测单元,该位移检测单元包括但不限于采用线性位移传感器。
35.进一步地,通过位移检测单元与上述第二阀控单元配合,以达到精确控制液压油
回流量的效果,其中,位移检测单元及上述第二阀控单元均与中控室电连接,通过位移检测单元检测两组液压缸的活塞杆位移量是否相同,当两个活塞杆的位移量相同时,即停止液压油的回流操作,也即第二阀控单元关闭。
36.在其中一个实施例中,如图2,两个回流油管各自独立,于两个回流油管上分别设有所述第二阀控单元。优选地,如图2,所述第二阀控单元采用二位二通电磁阀41。
37.在另外的实施例中,两个回流油管共用一组第二阀控单元,则可进一步减少阀门数量。
38.可选地,如图3,所述第二阀控单元包括二位三通电磁阀42,所述二位三通电磁阀42具有一个进口和两个出口,两个回流油管均包括第一管段和第二管段并且回流油管的入口端位于第一管段上,两个第一管段均与所述二位三通电磁阀42的进口连接,两个第二管段分别与所述二位三通电磁阀42的两个出口连接。该结构中,可以在两个第一管段上设置单向阀,单向阀允许的方向为流向二位三通电磁阀进口的方向,可以避免两个第一管段串流。
39.可选地,如图4,所述第二阀控单元包括三位四通电磁阀43,其中一个回流油管与所述三位四通电磁阀43的其中一个进口和其中一个出口连接,另一个回流油管与所述三位四通电磁阀43的另一个进口和另一个出口连接。
40.上述第二阀控单元仅需采用普通电磁阀即可获得良好的控制效果,无需采用伺服阀,成本较低。
41.本发明实施例还提供串辊控制方法,基于上述的串辊控制系统实施,其中,
42.通过所述第一阀控单元3控制对应侧的串辊液压缸进油,两组串辊液压缸在液压油的作用下进行相应的动作,使对应辊体2向目标侧窜动。
43.以中继油管串联操作侧串辊液压缸11的有杆腔和传动侧串辊液压缸12的有杆腔为例:
44.a、液压油流经第一阀控单元3后,流入操作侧串辊液压缸11的无杆腔,推动操作侧串辊液压缸11的活塞杆运动,进而将操作侧串辊液压缸11的有杆腔内的液压油推向传动侧串辊液压缸12的有杆腔,使得传动侧串辊液压缸12的活塞杆被推动,进而推动传动侧串辊液压缸12的无杆腔的液压油流经第一阀控单元3回到液压站,这种情况下,辊体2向传动侧窜动;
45.进一步地,第一阀控单元3得电时,第二阀控单元也得电,导通传动侧串辊液压缸12的无杆腔和其有杆腔,则传动侧串辊液压缸12的无杆腔的液压油会回流到其有杆腔,直至两个液压缸的活塞杆位移量相等;在液压缸的活塞杆位移量到位后,第一阀控单元3失电,第二阀控单元也失电。
46.b、液压油流经第一阀控单元3后,流入传动侧串辊液压缸12的无杆腔,推动传动侧串辊液压缸12的活塞杆运动,进而将传动侧串辊液压缸12的有杆腔内的液压油推向操作侧串辊液压缸11的有杆腔,使得操作侧串辊液压缸11的活塞杆被推动,进而推动操作侧串辊液压缸11的无杆腔的液压油流经第一阀控单元3回到液压站,这种情况下,辊体2向操作侧窜动;
47.进一步地,第一阀控单元3得电时,第二阀控单元也得电,导通操作侧串辊液压缸11的无杆腔和其有杆腔,则操作侧串辊液压缸11的无杆腔的液压油会回流到其有杆腔,直
至两个液压缸的活塞杆位移量相等;在液压缸的活塞杆位移量到位后,第一阀控单元3失电,第二阀控单元也失电。
48.实施例二
49.本发明实施例提供一种多辊轧机,配置有至少一组上述实施例一所提供的串辊控制系统。
50.串辊控制系统在多辊轧机中的安装结构为本领域常规技术,此处不作赘述。
51.其中,上述多辊轧机优选为是二十辊轧机。
52.在其中一个实施例中,上述多辊轧机配置有两组串辊模块,每组串辊模块包括相对配合的两个串辊液压缸,则至少其中一组串辊模块采用上述实施例一所提供的串辊控制系统,优选为两组串辊模块均采用上述串辊控制系统。
53.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。