1.本技术涉及上料装置的领域,尤其是涉及一种防水开关二次注塑用自动上料装置。
背景技术:
2.二次注塑成型是一种特殊的塑料成型工艺,是一种将某种塑胶原材料在一次的塑胶模具内成型后,将成型后的零件取出,放入二次成型的模具内再次注入同种或者另外一种塑胶材料成型的工艺。
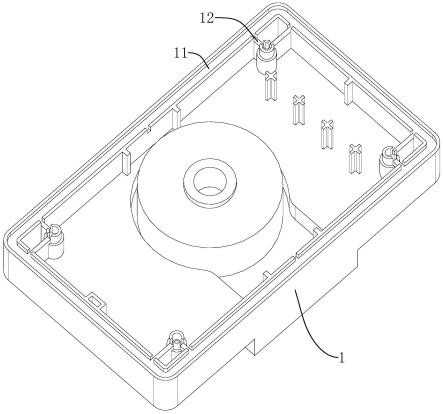
3.相关技术的防水开关盒如图1所示,包括一次注塑形成的盒体1。盒体1的其中一侧侧面上形成有环槽11和多个凹槽12,二次注塑需要将这些环槽11与多个凹槽12进行填充。
4.二次注塑装置包括定模和动模,操作人员手动将盒体安装在定模上,然后动模合模在定模上,对盒体进行二次注塑,二次注塑完成后,动模移出,注塑好的盒体跟着动模移出,然后操作人员手动将二次注塑好的盒体从动模取下。
5.上述的相关技术方案存在以下缺陷:盒体二次注塑的整个过程中,操作人员需要不断将待二次注塑的盒体安装在定模上,然后将二次注塑好的盒体从动模取下,整个过程比较麻烦。
技术实现要素:
6.为了减轻操作人员的作业压力,本技术提供一种防水开关二次注塑用自动上料装置。
7.本技术提供的一种防水开关二次注塑用自动上料装置采用如下的技术方案:一种防水开关二次注塑用自动上料装置,包括第一机械手、第二机械手和定位台,所述第一机械手与第二机械手上均设有取料装置,所述取料装置用来拿取和放下盒体,所述第一机械手及其取料装置用来将待二次注塑的盒体移动至定位台上,所述定位台上设有定位组件用来将第一机械手放置在定位台上的盒体进行定位,所述第二机械手及其取料装置用于将定位台上的盒体移动至定模上,同时也能够将动模上二次注塑后的盒体移出动模。
8.通过采用上述技术方案,通过使用第一机械手和第二机械手来控制取料装置的移动,取料装置用来拿取和放下盒体,操作人员不用再手动取放盒体,减轻了操作人员的作业压力。
9.优选的,所述取料装置包括承接块、两个充放气装置以及两组吸盘,所述承接块设置在对应第一机械手或者对应第二机械手上,每组吸盘包括若干吸盘,两组吸盘分别设置在承接块相互正对的两侧外壁上,两个充放气装置分别对应两组吸盘,所述充放气装置用来控制吸盘内的气压大小。
10.通过采用上述技术方案,通过吸盘吸附盒体,然后通过充放气装置来控制吸盘内的气压大小,当吸盘内气压变小时,吸盘对盒体的吸附力变大,盒体能够稳定的跟随取料装
置移动,当吸盘内气压变大时,吸盘对盒体的吸附力减弱,盒体能够自动脱离取料装置。
11.优选的,所述充放气装置包括活塞、驱动件一和若干连通管,所述承接块内开设有内腔,所述活塞滑动连接在内腔上并将内腔分隔成互不相通的两个第一腔,所述驱动件一驱动活塞进行滑动,若干连通管分别对应若干吸盘,所述连通管的两端分别连通对应吸盘和其中一个第一腔。
12.通过采用上述技术方案,通过驱动件一驱动活塞进行滑动,活塞滑动能够改变第一腔的容积大小,通过连通管将吸盘与相应第一腔连通,从而改变吸盘内的气压大小,实现吸盘对盒体的吸附和脱离。
13.优选的,所述驱动件一包括自锁按钮装置和若干连接杆,所述自锁按钮装置设置在承接块以及对应活塞上,所述活塞在自锁按钮装置的作用下只能保持在内腔中两个不同的固定位置,两个固定位置分别为第一位置和第二位置;若干连接杆对应若干吸盘,所述连接杆的一端固定在对应活塞上且沿平行于活塞的滑动方向滑动连接在承接块上,连接杆远离活塞的一端伸出承接块并固定在对应吸盘上,所述连接杆每抵接按动活塞一次,所述活塞在第一位置和第二位置之间来回切换一次。
14.通过采用上述技术方案,连接杆每抵接按动活塞一次,通过使活塞切换不同的位置,来实现第一腔的空间大小变化,从而改变吸盘内气压大小,实现吸盘与盒体的吸附和脱离。
15.优选的,还包括第一弹簧,所述连接杆包括第一杆和第二杆,所述第一杆的一端固定在活塞上且沿平行于活塞的滑动方向滑动连接在承接块上,所述第一杆远离活塞的一端伸出承接块并开设有滑槽,所述第二杆的一端滑动连接在滑槽上,所述第二杆的另一端固定在对应吸盘上,所述第二杆外壁上设有限位块,所述滑槽内壁上开设有限位槽,所述限位块沿平行于第二杆的滑动方向滑动连接在限位槽内,所述第一弹簧设置在第二杆上并驱动第二杆始终朝向远离承接块一侧移动至限位块抵接在限位槽内壁上,当第二杆朝向承接块一侧移动的过程中,所述第二杆移动至限位块抵接在限位槽靠近承接块的一侧侧面上时方可带动第一杆以及活塞继续移动。
16.通过采用上述技术方案,连接杆在驱动活塞移动之前,第二杆需要先移动一段距离,此时吸盘会先抵接在盒体上并施力一段时间,能够使吸盘在活塞抽气前,能够更好的吸附在盒体上,减小吸盘出现漏气的情况,使充放气装置更好的作用在吸盘上。
17.优选的,还包括检测装置,所述检测装置用来检测吸盘的气密性。
18.通过采用上述技术方案,吸盘吸附在盒体时,吸盘的气密性是决定吸盘能否稳定的吸气盒体的关键因素,所以通过设置检测装置来检测吸盘的气密性是非常必要的,检测出来气密性不够时,能够停止设备运行,防止运输的途中盒体从吸盘上掉落,对盒体起到保护作用,经由操作人员检修后再次运行设备。
19.优选的,所述检测装置包括压力传感器、气球和封堵件,所述第二杆上开设有连通吸盘以及滑槽的第一通道,所述气球固定在第一杆的外壁上,所述第一杆上开设有连通气球和滑槽的第二通道,所述防堵件在限位块靠近限位槽远离吸盘的一侧侧面之前对连通管进行封堵,当吸盘抵接盒体后吸盘内部呈密封状态时,所述气球随着第二杆的移动充气膨胀,所述压力传感装置设置在第一杆上并用来检测膨胀后的气球抵接在压力传感器上的压力大小。
20.通过采用上述技术方案,吸盘抵接在盒体上,如果吸盘气密性良好,在第二杆移动至限位块抵接在限位槽远离吸盘的一侧侧面之前,防堵件对连通管进行封堵,此时第一通道、滑槽以及第二通道呈密封状态,滑道被第二杆逐渐压缩,此时滑道内的气体会进入气球对气球进行充气,充气后的气球能够抵接在压力传感器上,压力传感器通过测量抵接的压力大小既能够判断此时吸盘的气密性是否良好。
21.优选的,所述封堵件包括第二弹簧、抵接杆和活动块,所述连通管包括端部相互连通的软质管和硬质管,所述硬质管远离软质管的一端与吸盘连通,所述软质管远离硬质管的一端与相应第一腔连通,所述硬质管上固定有固定块,所述固定块上开设有与硬质管内部连通的活动槽,所述活动槽长度方向的两端分别位于硬质管的两侧,所述活动块沿平行于第二杆的滑动方向滑动连接在活动槽内并用来封堵住硬质管,所述活动块上开设有用来使硬质管恢复连通的第三通道,所述第二弹簧设置在活动块上并驱动活动块始终朝向第一杆一侧移动至封堵住硬质管,所述抵接杆固定在第一杆上,所述抵接杆的一端伸至活动槽并抵接在活动块上,当限位块移动至抵接在限位槽远离吸盘的一侧侧面上时,所述第三通道与硬质管连通。
22.通过采用上述技术方案,以第二杆为参照物,当第一杆朝向第二杆一侧移动的过程中,抵接杆会抵接在活动块上并同时驱动活动块移动,在活动块移动至第三通道与硬质管连通之前,压力传感器完成检测,如果气密性没有问题,表示取料装置能够继续运行完成取料。
23.综上所述,本技术包括以下至少一种有益技术效果:通过使用第一机械手和第二机械手来控制取料装置的移动,取料装置用来拿取和放下盒体,操作人员不用再手动取放盒体,减轻了操作人员的作业压力;通过设置检测装置,由于吸盘的气密性是决定吸盘能否稳定的吸气盒体的关键因素,所以通过设置检测装置检测出来气密性不够时,能够停止设备运行,防止运输的途中盒体从吸盘上掉落,对盒体起到保护作用。
附图说明
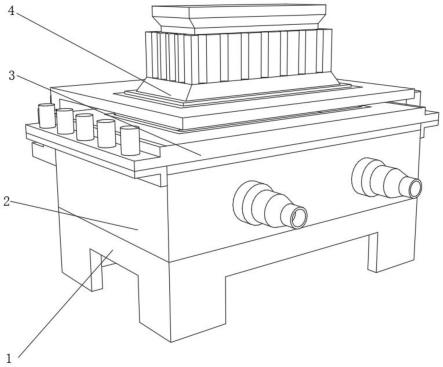
24.图1是相关技术的整体结构示意图。
25.图2是本技术实施例的整体结构示意图。
26.图3是本技术实施例取料装置在二次注塑装置上的作业示意图。
27.图4是本技术实施例取料装置的结构示意图。
28.图5是沿图4中a-a线的剖视图。
29.图6是本技术实施例自锁按钮装置的结构示意图。
30.图7是图6中d处的放大图。
31.图8是图5中c处的放大图。
32.图9是沿图4中b-b线的剖视图。
33.图10是图9中e处的放大图。
34.附图标记说明:1、盒体;11、环槽;12、凹槽;21、第一机械手;22、第二机械手;23、定位台;24、定位组件;241、定位块;242、气缸;25、动模;26、定模;27、成品箱;3、取料装置;31、承接块;311、内腔;312、第一腔;313、侧槽;32、充放气装置;321、活塞;3211、第一位置;
3212、第二位置;322、连通管;3221、软质管;3222、硬质管;33、吸盘;34、驱动件一;341、连接杆;3411、第一杆;3412、第二杆;3413、滑槽;3414、限位槽;3415、限位块;3416;第一弹簧;35、自锁按钮装置;351、滑块;3511、侧块;3512、心形槽;352、转钩;353、第三弹簧;36、第一通道;37、第二通道;4、检测装置;41、压力传感器;42、气球;43、封堵件;431、第二弹簧;432、抵接杆;433、活动块;4331、第三通道;44、固定块;441、活动槽。
具体实施方式
35.以下结合附图1-10对本技术作进一步详细说明。
36.本技术实施例公开一种防水开关二次注塑用自动上料装置。
37.参照图1、图2,本实施例的防水开关二次注塑用自动上料装置包括第一机械手21、第二机械手22和定位台23,第一机械手21与第二机械手22上均设有取料装置3,取料装置3用来拿取和放下盒体1,第一机械手21与第二机械手22用来控制取料装置3的移动。
38.参照图1、图3,盒体1在经过一次注塑后需要进行二次注塑,盒体1的其中一侧侧面上形成有环槽11和多个凹槽12,二次注塑需要将这些环槽11与多个凹槽12进行填充。二次注塑装置包括定模26和动模25,定模26朝向动模25的一侧侧面开设有供盒体1卡入的卡槽,将盒体1安装在定模26上,然后动模25合模在定模26上,对盒体1进行二次注塑,二次注塑完成后,动模25移出,注塑好的盒体1跟着动模25移出,然后再将二次注塑好的盒体1从动模25取下。
39.参照图2、图3,使用本装置进行二次注塑的整个流程为:操作人员先在外置箱体上堆放好待二次注塑的盒体1,然后第一机械手21以及取料装置3用来将箱体内待二次注塑的盒体1拿取并移动至定位台23上放下,定位台23上设有定位组件24用来将第一机械手21放置在定位台23上的盒体1进行定位,然后第二机械手22及其取料装置3用于将定位台23上的盒体1移动至定模26上, 然后将上一个动模25带出的注塑好的盒体1从动模25上取下并移出来,然后将这些注塑好的盒体1放置在成品箱27内。
40.参照图2、图3,定位组件24包括两个气缸242和多个定位块241,多个定位块241固定在定位台23顶面上,多个定位块241用于供定位盒体1相邻的两侧侧面定位抵接,两个气缸242分别固定在定位台23上,气缸242的活塞321杆朝向盒体1一侧设置,两个气缸242分别用于将盒体1推动至抵接在多个定位块241上。
41.参照图3、图4,取料装置3包括承接块31、两个充放气装置32以及两组吸盘33,承接块31安装在对应第一机械手21或者对应第二机械手22上,第一机械手21和第二机械手22能够直接带动承接块31进行移动。两组吸盘33分别设置在承接块31相互正对的两侧外壁上,两个充放气装置32分别对应两组吸盘33,每组吸盘33包括若干吸盘33,两组吸盘33在承接块31外壁上的安装位置根据盒体1的正反两面所能吸附的实际位置而定,充放气装置32用来控制对应组内多个吸盘33内的气压大小。
42.参照图4、图5,充放气装置32包括活塞321、驱动件一34和若干连通管322,承接块31内开设有两个内腔311,两个内腔311分别对应两个充放气装置32,活塞321滑动连接在内腔311上并将内腔311分隔成互不相通的两个第一腔312,活塞321的滑动方向在两组吸盘33之间来回滑动,驱动件一34驱动活塞321进行滑动,若干连通管322分别对应若干吸盘33,连通管322的两端分别连通对应吸盘33和靠近吸盘33一侧的第一腔312。
43.参照图6、图7,驱动件一34包括自锁按钮装置35和若干连接杆341,自锁按钮装置35设置在承接块31以及对应活塞321上,自锁按钮装置35可以为按压式圆珠笔上使用的结构,也可以为自锁开关上使用的结构,在开关按钮第一次按时,开关接通并保持,即自锁,在开关按钮第二次按时,开关断开,同时开关按钮弹出来。
44.参照图6、图7,本技术的自锁按钮装置35包括滑块351、转钩352和两个第三弹簧353,滑块351位于活塞321远离对应吸盘33的一侧,滑块351的一端固定在活塞321上,滑块351的另一端滑块351连接在承接块31内,滑块351的两侧外壁上固定有侧块3511,承接块31内开设有与两个侧块3511匹配的两个侧槽313,侧槽313不与内腔311连通,两个侧块3511沿平行于活塞321的滑动方向滑动连接在对应侧槽313内,两个第三弹簧353分别对应两个侧槽313,第三弹簧353的两端分别抵接在侧块3511远离对应吸盘33的一侧侧面上以及侧槽313远离对应吸盘33的一侧侧面上,第三弹簧353始终呈压缩状态。
45.参照图6、图7,滑块351的一侧侧面开设有心形槽3512,转钩352的一端转动连接在承接块31上,转钩352的另一端位于心形槽3512内并用于沿着心形槽3512移动,心形槽3512内相应位置设有阶梯,滑块351来回移动时,转钩352的端部只能沿着一个方向在心形槽3512内移动。参照图5、图6,活塞321在自锁按钮装置35的作用下只能保持在内腔311中两个不同的固定位置,两个固定位置分别为第一位置3211和第二位置3212,第一位置3211相比于第二位置3212距离对应吸盘33的距离更近。
46.参照图5、图8,若干连接杆341分别对应若干吸盘33,连接杆341的一端伸至对应内腔311并固定在对应活塞321上,连接杆341能够沿平行于活塞321的滑动方向滑动连接在承接块31上,连接杆341不对内腔311的密封性造成影响,连接杆341远离活塞321的一端伸出承接块31并固定在对应吸盘33上。连接杆341每抵接按动活塞321一次,活塞321能够在第一位置3211和第二位置3212之间来回切换一次。
47.参照图5、图9,当吸盘33吸附盒体1时,活塞321位于第一位置3211,然后驱动承接块31朝向盒体1一侧移动使吸盘33抵接在盒体1上,然后驱动承接块31远离盒体1一侧移动,此时活塞321位于第二位置3212,与连通管322连通的第一腔312的空间由小变大,吸盘33内产生负压将盒体1吸附。
48.参照图5、图9,当吸盘33脱离盒体1时,活塞321位于第二位置3212,然后驱动承接块31朝向盒体1一侧移动,使自锁按钮装置35解除自锁状态,然后驱动承接块31远离盒体1一侧移动,此时活塞321位于第二位置3212,与连通管322连通的第一腔312的空间由大变小,吸盘33内由于气压不足从而无法稳定的吸附住盒体1,从而实现吸盘33与盒体1的脱离。
49.参照图9、图10,连接杆341包括第一杆3411和第二杆3412,第一杆3411的一端固定在活塞321上且沿平行于活塞321的滑动方向滑动连接在承接块31上,第一杆3411的另一端伸出承接块31,第一杆3411伸出承接块31的一端端面上开设有滑槽3413,第二杆3412的一端沿平行于活塞321的滑动方向滑动连接在滑槽3413上,第二杆3412的另一端固定在对应吸盘33上。第二杆3412的外壁上固定有限位块3415,滑槽3413内壁上开设有限位槽3414,限位块3415沿平行于第二杆3412的滑动方向滑动连接在限位槽3414内。滑槽3413内设有第一弹簧3416,第一弹簧3416的两端分别抵接在第二杆3412远离吸盘33的一侧侧面以及滑槽3413远离吸盘33的一侧侧面上,第一弹簧3416始终呈压缩状态。当没有外力作用时,第二杆3412在第一弹簧3416的作用下始终朝向远离承接块31一侧移动至限位块3415抵接在限位
槽3414内壁上。
50.参照图7、图10,第一弹簧3416的弹性小于第三弹簧353的弹性,参照图9、图10,当第二杆3412朝向承接块31一侧移动的过程中,第二杆3412移动至限位块3415抵接在限位槽3414靠近承接块31的一侧侧面上时,方可带动第一杆3411以及活塞321继续移动。
51.参照图5、图8,连接杆341在驱动活塞321移动之前,第二杆3412需要先移动一段距离,此时吸盘33会先抵接在盒体1上并施力一段时间,能够使吸盘33在活塞321抽气前,能够更好的吸附在盒体1上,减小吸盘33出现漏气的情况,使充放气装置32更好的作用在吸盘33上。
52.参照图8、图10,连接杆341上设有检测装置4,检测装置4用来检测吸盘33的气密性。检测装置4包括压力传感器41、气球42和封堵件43,第二杆3412上开设有连通吸盘33以及滑槽3413的第一通道36。气球42固定安装在第一杆3411的外壁上,第一杆3411上开设有连通气球42和滑槽3413的第二通道37,防堵件在限位块3415靠近限位槽3414远离吸盘33的一侧侧面之前对连通管322进行封堵。当防堵件防堵连通管322时,第一通道36、滑槽3413以及第二通道37呈密封状态不与外界连通。压力转杆器固定在第一杆3411的外壁上,压力传感器41的压力检测面板位于气球42远离第一杆3411的一侧,压力传感装置用来检测膨胀后的气球42抵接在压力传感装置上的压力大小。
53.参照图8、图10,吸盘33抵接在盒体1上,如果吸盘33气密性良好,在第二杆3412移动至限位块3415抵接在限位槽3414远离吸盘33的一侧侧面之前,防堵件对连通管322进行封堵,滑道被第二杆3412逐渐压缩,此时滑道内的气体会进入气球42对气球42进行充气,充气后的气球42能够抵接在压力传感器41上,压力传感器41通过测量抵接的压力大小既能够判断此时吸盘33的气密性是否良好。
54.参照图3、图10,承接块31上还设有控制器,控制器用来接收压力传感器41的检测数值并与气密性良好时的标准值进行对比,来控制对应第一机械手21或者第二机械手22停止继续运行。
55.参照图8、图10,封堵件43包括第二弹簧431、抵接杆432和活动块433,连通管322包括端部相互连通的软质管3221和硬质管3222,硬质管3222由塑料、不锈钢等硬质材料制成,软质管3221则为软管,硬质管3222远离软质管3221的一端与吸盘33连通,软质管3221远离硬质管3222的一端与相应第一腔312连通。硬质管3222上固定有固定块44,也可以看出是硬质管3222垂直穿设在固定块44长度方向的中心位置,固定块44上开设有与硬质管3222内部连通的活动槽441,活动槽441的长度方向平行于第二杆3412的滑动方向,活动槽441长度方向的两端分别位于硬质管3222径向方向的两侧,活动块433沿平行于第二杆3412的滑动方向滑动连接在活动槽441内并用来封堵住硬质管3222。活动块433上开设有用来使硬质管3222恢复连通的第三通道4331。
56.参照图8、图10,吸盘33始终位于固定块44远离承接块31的一侧,第二弹簧431位于活动槽441内,第二弹簧431的两端分别抵接在活动槽441靠近吸盘33的一侧侧面上以及活动块433靠近吸盘33的一侧侧面上。第二弹簧431始终呈压缩状态,当没有外力作用在活动块433上时,活动块433在第二弹簧431的作用下始终朝向远离吸盘33一侧移动至封堵住硬质管3222。
57.参照图8、图10,抵接杆432呈l型设置,抵接杆432的一端垂直固定在第一杆3411
上,抵接杆432的另一端伸至活动槽441内并抵接在活动块433上。限位块3415移动至抵接在限位槽3414远离吸盘33的一侧侧面上时,第三通道4331与硬质管3222完全连通。
58.参照图8、图10,在吸盘33吸附盒体1的过程中,以第二杆3412为参照物,当第一杆3411朝向第二杆3412一侧移动的过程中,抵接杆432会抵接在活动块433上并驱动活动块433移动,在活动块433移动至第三通道4331与硬质管3222连通之前,气球42充气膨胀,压力传感器41完成检测,如果气密性没有问题,表示取料装置3能够继续运行完成取料。
59.本技术实施例一种防水开关二次注塑用自动上料装置的实施原理为: 操作人员先在外置箱体上堆放好待二次注塑的盒体1,然后第一机械手21以及取料装置3用来将箱体内待二次注塑的盒体1拿取并移动至定位台23上放下,定位台23上设有定位组件24用来将第一机械手21放置在定位台23上的盒体1进行定位,然后第二机械手22及其取料装置3用于将定位台23上的盒体1移动至定模26上,然后将上一个动模25带出的注塑好的盒体1从动模25上取下并移出来,然后将这些注塑好的盒体1放置在成品箱27内。
60.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。