技术特征:
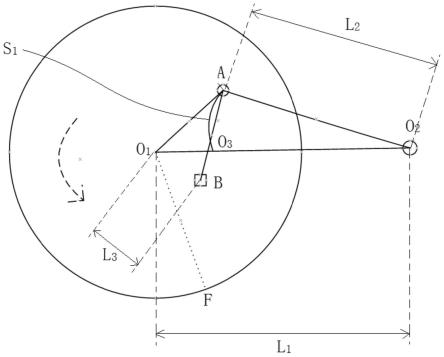
1.一种传感器与晶圆相对轨迹追踪方法,其特征在于,包括以下步骤:获取抛光盘(2)中心o1点与抛光头(3)公转中心o2点之间的距离l1;获取抛光头(3)公转中心o2点与抛光头(3)中心a点之间的距离l2;获取传感器(1)所处的位置b点与抛光盘(2)中心o1点之间的距离l3;获取抛光盘(2)的转速rpm1,根据抛光头(3)运动公式得出抛光头(3)自转中心在(t
2-t1)时间内的弧长位移s1;获取角fo1o2的大小,包括:以o1为极点,o1o2的连线为极轴,通过弧度角公式可得知,角fo1b的弧度角为:∠fo1b=2*π/60*rpm1*(t
2-t1)其中,传感器(1)扫到晶圆时的时间t1,传感器(1)上传数据的时间t2,t1时刻传感器(1)在抛光盘上所处半径为o1f,t2时刻抛光头(3)中心为a点;计算bo1o2的弧度角为:∠bo1o2=∠fo1o
2-∠fo1b根据弧度角,计算b点的极坐标为(l3,∠bo1o2);计算角ao2o1的弧度角为:∠ao2o1=s1/l2;根据三角形余弦定理,计算ao1的长度为:计算角ao1o2的弧度角为:∠ao1o2=arcsin(l2*sin(∠ao2o1)/ao1);计算a点的极坐标为(ao1,∠ao1o2);将a点和b点的极坐标转化为以o1为原点的直角坐标系的坐标:a(ao1*cos(∠ao1o2),ao1*sin(∠ao1o2));b(l3*cos(∠bo1o2),l3*sin(∠bo1o2));根据两点距离公式可推算出ab两点之间的距离,计算传感器相对于抛光头自转中心的距离为:在t1时刻,以a点此刻所处的位置为圆心,ab此刻的长度为半径形成第一圆,第一圆与晶圆边缘产生第一交点;经过预设时间后,以当前时刻a点所处位置处为圆心,ab此刻的长度为半径形成第二圆,第二圆与第一圆产生第二交点;交点获取步骤:再次经过预设时间后,以此刻a点所处位置处为圆心,ab此刻的长度为半径形成第三圆,第三圆与第二圆产生第三交点;重复执行交点获取步骤,直至传感器(1)脱离晶圆的位置时,得到若干交点;传感器(1)在扫过晶圆时,通过将若干交点进行曲线拟合,得到传感器(1)在晶圆上扫过的弧线。
2.根据权利要求1所述的传感器与晶圆相对轨迹追踪方法,其特征在于,所述预设时间为1ms。3.根据权利要求1所述的传感器与晶圆相对轨迹追踪方法,其特征在于,所述抛光头(3)在抛光盘(2)表面上做自定义位移运动。4.根据权利要求1所述的传感器与晶圆相对轨迹追踪方法,其特征在于,还包括有控制器,所述控制器与传感器(1)通信连接。5.根据权利要求4所述的传感器与晶圆相对轨迹追踪方法,其特征在于,还包括有压力调节装置,与所述抛光头(3)连接,且所述压力调节装置与所述控制器通信连接。6.根据权利要求1所述的传感器与晶圆相对轨迹追踪方法,其特征在于,还包括有轴体(5),设置所述抛光盘(2)一侧,抛光头(3)通过支杆(4)转动安装在所述轴体(5)上。7.根据权利要求1所述的传感器与晶圆相对轨迹追踪方法,其特征在于,所述抛光盘(2)的转动方向与所述抛光头(3)的公转方向相同。
技术总结
本发明提供了一种传感器与晶圆相对轨迹追踪方法,属于CMP设备技术领域,包括以下步骤:通过已知条件,对AB之间的距离进行计算;在T1时刻,以A点此刻所处的位置为圆心,AB此刻的长度为半径形成第一圆,第一圆与晶圆边缘产生第一交点;重复执行交点获取步骤,直至传感器脱离晶圆的位置时,得到若干交点;传感器在扫过晶圆时,通过将若干交点进行曲线拟合,得到传感器在晶圆上扫过的弧线。本发明提供的传感器与晶圆相对轨迹追踪方法,能够实时获得传感器相对于抛光头中心的距离,获取传感器扫过晶圆时的弧线,获得传感器相对于晶圆的实时位置,可以由传感器传来的数据得知此时晶圆的研磨状况,进而可以对抛光头的压力进行实时调整。整。整。
技术研发人员:李嘉浪 白琨 贾若雨 吴燕林 周庆亚 张金环 刘志伟
受保护的技术使用者:北京烁科精微电子装备有限公司
技术研发日:2021.06.09
技术公布日:2022/12/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。